今日、急速に進歩している技術環境において、LiDARは森林管理からインフラ検査にいたるまで、様々な用途において極めて重要なツールとして際立っています。DJI Enterpriseの包括的なガイドで、LiDARの世界に飛び込みましょう。この小冊子は、基本原理から実際の用途に至るまで、LiDAR技術とその変革の可能性に関する重要な知識を提供します。
LiDAR技術の概要と原理
LiDARとは?
LiDARはLight Detection and Rangingの略で、高速レーザーパルスを使用して対象物の表面をマッピングする、リモートセンシング技術です。LiDARはレーザービームを照射し、その光が物体から反射するまでの時間を測定することにより、詳細な3次元ポイントマップを作成します。
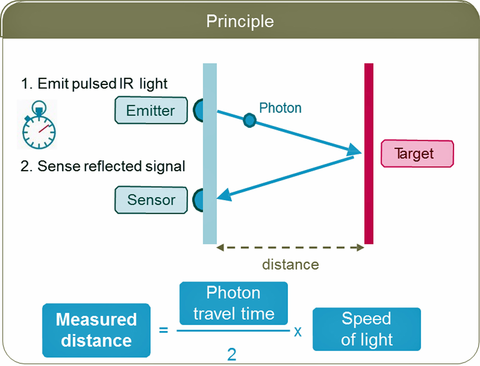
真っ暗な部屋の中で懐中電灯を持っていると想像してください。懐中電灯をさまざまな物体に向けると光が跳ね返り、その光を見ることで物体がどこにあるか、どれくらい離れているかを知ることができます。光を当てる回数を増やし、さまざまな角度から照らすほど、部屋の配置の詳細を知ることができます。LiDARも同様に機能しますが、懐中電灯のような可視光を使用する代わりに、不可視のレーザー光を使用します。以下に原理を説明します:
1. 照射: LiDAR機器が物体に向かってレーザー光の高速パルスを照射します。
2. 反射: 光は物体に反射してLiDARセンサーに戻ってきます。
3. 検出: 機器は、光が戻るまでにかかった時間を測定します。光の速度は一定であるため、この時間を使用して、LiDARセンサーと対象物間の距離を計算できます。
LiDARと写真測量
LiDARシステムはデータを測定し、写真測量システムはデータを計算します。この重要な違いにより、それぞれが用途により適したものになります。LiDARはレーザーパルスを使用して実物を測定するため、絶対的なデータ精度が要求される用途に最適です。LiDARは植生を透過することができ、照明条件に影響されないため、森林や植生が密集している領域のマッピングに優れた選択肢です。LiDARは、正確な地形モデルや地形マップの作成にも役立ちます。
写真測量では、カメラを使用して領域の重なり合う画像を撮影し、それらの画像をつなぎ合わせて3Dモデルまたはオルソマップを作成します。LiDARよりも安価で、ドローンやカメラのような既製のハードウェアで使用できます。これは、建物やインフラの極めて詳細なモデルや、検査および監視用途の高解像度オルソマップの作成に役立ちます。
| アスペクト | 写真測量 | LiDAR |
|---|---|---|
| 定義 | 写真から測定値や3Dモデルを取得する技術。 | レーザー光を使って距離を測定し、地表の精密な3Dモデルを作成するリモートセンシング手法。 |
| 精度 | RTKでGCPを適用した後、明るくクリアな条件下で高い精度を実現。 | 精度はPOSの初期状態に依存し、照明条件には依存しない。 |
| コスト | 一般的に低コストで、小規模プロジェクトには手頃な価格です。 | 高度な機材と処理が必要なため、コストは高くなります。 |
| 地形ハンドリング | 都市環境や開けた環境で優れた性能を発揮します。 | 密生した植生や都市環境など、さまざまな地形で優れた性能を発揮します。 |
| データ処理 | 特に大規模なデータセットの場合、処理に時間がかかります。 | データは空間座標形式でネイティブに取り込まれるため、処理は高速です。 |
| 光条件 | 最適な結果を得るには、良好な照明が必要です。 | 夜間も含め、あらゆる照明条件下でも効果的です。 |
| 植生の透過性 | 密集した植生は困難です。 | 密集した植生を突き抜けて地表に到達します。 |
| 天候依存性 | 雲や雨などの天候が性能に影響する可能性があります。 | 天候の影響を受けにくくなっています。 |
| 空間分解能 | 高い空間分解能で地表の詳細を再現します。 | 写真測量の空間分解能に比べて精度は低くなります。 |
| Application用途 | 文化遺産の記録、小規模なマップの作成、建築に最適です。 | B大規模な地形図の作成、林業、都市計画に最適です。 |
統合型の航空機搭載LiDARシステムの構成要素は何ですか?
ハードウェアコンポーネント
LiDARシステム
- LiDARモジュール:LiDARシステムの最も重要な構成要素であるレーザーモジュールは、対象物の表面にパルスレーザービームを照射します。レーザーモジュールは、レーザー光源、受信機、光学部品、電子コントローラーなどの複数の部品で構成されています。
- レーザー光源:LiDARセンサーと環境内の物体との間の距離を測定するために、短パルスのレーザー光を照射します。
- 受信機:反射したレーザー光を検出し、LiDARシステムで処理できる電子信号に変換します。
- 光学部品:これらの構成部品は、レーザービームを対象物の表面に向け、集光し、反射光を集める役割を担っています。
- 電子コントローラー:レーザーパルスのタイミングと持続時間を制御し、受信機からの信号を処理します。
- GNSS(グローバル衛星ナビゲーションシステム)受信機は、スキャンされたLiDARの結果に正確なジオリファレンス(地理参照)を提供するために使用されます。ほとんどのUAV LiDARシステムは、ジオリファレンスと後処理のために、衛星データを記録する独自のGNSSシステムを使用するか、DJI PSDKと統合され、ドローンシステムのGNSSシステムを使用します。
- IMU(慣性計測装置)は、LiDARシステムの加速度と角度率を測定する装置です。IMUは、これらの測定値を経時的に積分することにより、3次元空間におけるLiDARシステムの位置、速度、姿勢を決定します。この情報は、データ収集プロセス中のLiDARシステムの動きや振動を補正するために使用されます。
- INS(慣性ナビゲーションシステム)は、IMUからの生データを使用し、それを統合して、既知の出発点、方位、速度に対する物体の位置、速度、方位情報を提供します。INSはIMUデータを取得し、GNSS測位情報と統合することで、データ収集中のLiDARセンサーの位置と姿勢を継続的に推定します。
UAVシステム
- UAV(無人航空機)。調査対象エリア上でLiDARシステムを飛行させるために使用され、LiDARシステムの正確なジオリファレンスのために、独自のGNSSおよびRTK/PPKシステムを搭載しています。
ソフトウェアコンポーネント
- 飛行ミッション計画用ソフトウェアは、LiDARシステムを搭載したドローンの飛行経路を計画するために使用されます。このソフトウェアを使用すると、調査するエリアを定義し、ウェイポイントベースの飛行ルートを自動的に生成できます。ユーザーは、自律ウェイポイント飛行のUAVシステムパラメーターとセンサーアクションを調整できます。次に、ソフトウェアがエリアを効率的にカバーする飛行経路を生成し、LiDARシステムに必要なデータを収集します。このデータを使用して、調査対象エリアの詳細な3Dマップやモデルを作成できます。
- 飛行監視および制御ソフトウェアを使用すると、データ収集中に飛行経路とUAVおよびLiDARシステムの状態をリアルタイムで監視できます。このソフトウェアは、高度、速度、バッテリー残量などのさまざまなパラメーターを表示します。この情報は、UAVの安全性を確保し、高品質のLiDARデータを収集するために不可欠です。さらに、飛行監視ソフトウェアは、飛行中に問題や故障が発生した場合にユーザーに警告を発します。
- 生点群処理ソフトウェアは、センサーメーカーによって開発されたOEMソフトウェアです。このソフトウェアは、すべてのシステムコンポーネントから収集された生のLiDARデータを処理し、利用できるように、それらのデータをLAS/LAZなどの操作可能な形式に出力します。
- 点群処理ソフトウェアは、点群データを操作および分析するために設計されたコンピュータープログラムです。点群処理ソフトウェアは、用途に応じて、図面の作成、測定の実行、表面の抽出、分類などのさまざまなタスクに使用されます。
主な用語と知識
物体表面の反射率
- 物体の表面が異なれば、反射率も異なります。
- ほとんどの物体表面の反射率は10%以上です。
- 水は強力な吸収体であり、波長905 nmの一般的なLiDARレーザーは直接吸収されます。水深測量型のレーザー波長が短いLiDARを除き、LiDARレーザーは水を透過しません。
表面反射率の例をいくつか示します。
- 打ちたてのアスファルト:4~7パーセント
- 乾いた草地:15~20パーセント
- 森林の樹冠:5~20パーセント
- 濡れたコンクリート:30~50パーセント
- 雪:60~90パーセント
表面反射率に基づいて色付けされた点群(赤が高く、青が低い)
LiDARスキャン方法
LiDARセンサー内の回転方法を変えることで、LiDARシステムは反復スキャンと非反復スキャンという2つの異なる機械的スキャンモードを実現します。
反復スキャン法
反復スキャンは、水平FOV(70.4°×4.5°)のみをカバーします。
長所:モバイルマッピングでは、慣性航法精度のドリフトが短時間では極めて小さいため、物体のスキャンは極めて短い時間しか行われず、スキャンされたモデルの精度が比較的高くなります。
短所:垂直FOVは極めて小さく、垂直面の情報がほとんどありません。垂直面の情報が必要な場合は、垂直FOVの損失を補填するために、2つ以上の飛行経路を計画する必要があります。
用途:地形の測定、一般的なDEM/DSM生成など、比較的緩やかな地形と高い精度が要求されるシナリオ向け。
*点群の精度を確保するために、測量では反復スキャン法を使用することをお勧めします。
非反復スキャン法
非反復スキャンは、FOV全体(70.4°×77.2°)をすばやくカバーします
長所:FOV全体をカバーし、垂直スキャンを実行し、ジンバル角度を設定せずに1回のスキャンで適切な垂直情報を取得できます。
短所:モバイルマッピングでは、一定の慣性航法精度に依存しながら、物体がさまざまな位置と時間でスキャンされます。慣性航法の精度が経時的に変動すると、モデルの精度が低下します。結果として、物体がぼやけたり、二重になったり、点群が太くなったり、ワイヤが太くなったりします。この影響は、視野が広い非反復スキャンで特に顕著になります。
用途:比較的精度の低い要件、高い効率の要件、完全な標高情報要件などのシナリオ(都市3Dモデリング、複雑な3次元構造モデリング、送電線検査、緊急の高速マッピングなど)に適しています。
*送電線検査のシナリオで単線飛行を選択する場合は、非反復スキャン法を使用することをお勧めします。
波長
LiDARシステムはレーザーを使用して光パルスを照射し、レーザーの波長によってパルスの特性が決まります。レーザーの波長は、LiDARシステムがさまざまな物質を透過する能力と、システムが検出できる反射の種類に影響します。以下は、2つの一般的なLiDARタイプと、それらに対応する波長範囲です。
- 近赤外(NIR)LiDARは通常、800~1000ナノメートルの波長のレーザーを使用します。NIR LiDARシステムは植生の透過に優れており、単一パルスからの複数のリターンを検出できるため、林業用途に最適です。ただし、このLiDARシステムは水を透過できないため、水深測量用途には適していません。
- 水深測量LiDARは、緑と青のスペクトルの短い波長の光を使用して水を透過し、海底の深度を測定します。波長532 nmの緑のレーザー光は他の波長よりも水を透過しやすいため、水深測量LiDARに最もよく使用されています。波長445 nmの青のレーザー光は、透明度の高い水質での透過性に優れているため、一部の水深測量LiDARシステムに使用されています。水深測量LiDARシステムは、海底マッピング、沿岸ゾーン管理、水中インフラ検査などの用途に使用されています。
検出範囲
検出範囲とは、LiDARシステムが物体を正確に検出および測定できる最大距離のことです。LiDARシステムの検出範囲には、レーザーの出力と波長、受信機の感度、スキャン対象の反射率など、複数の要因が影響します。通常、検出範囲の指定は、対象表面の反射率や環境条件を基準として行われます。
LiDARメーカーが指定する最大検出範囲は、通常、90%の反射率に基づいてテストされており、実用には意味をなさないことに注意してください。反射率10%での検出距離は、ほとんどの表面に適用されるため、より実用的な意味があります。
LiDARシステムでは、受信範囲が広く、より包括的なデータ収集が可能になるため、長い検出範囲が望ましいと言えます。
複数のリターン
LiDARシステムのレーザーはパルスを照射します。これらのパルスは、物体に当たると反射します。光は完全に遮られることがないため、何かにぶつかるたびに跳ね返されながら進み続けます。これにより、LiDARは植生を「見通せる」ように見えます。しかし実際には、LiDARは葉と葉の隙間を通して地面や樹冠を検出しているのです。
- 最初のリターン:これは、センサーが捉える最初の反射であり、多くの場合、レーザーパルスの経路にある最上部の物体(こずえや建物の屋上など)からの反射です。
- 中間のリターン:これは、最上部の物体と地面の間にある物体(枝や窓など)からの反射です。
- 最後のリターン:これは通常、地面または物体基部からの反射です。
*空気中の雨やスモッグにより、LiDARデータに干渉やノイズが発生する可能性があります。このような状況では、最も強力な「シングルリターン」を使用することをお勧めします。
関連用途
複数のリターンを検出できるため、物体をより詳細に把握できます。例:
- 植生の抽出:個々の植物をセグメント化し、カウントし、バイオマスを計算して、植生パラメーターを分析します。
- 地形マッピング:DSM(デジタルサーフェスモデル)からDEM(デジタル標高モデル)を抽出して、地形分析を行います。
- 送電線モデリング:送電線はしばしば重なり合っていますが、複数リターン機能によって一度に何層もの電線を測定できるため、障害物によるデータ欠落を低減できます。
ビーム発散角
ビーム発散角とは、レーザービームが距離によって広がったり拡散したりすることです。ビーム発散角は、レーザービームがLiDARセンサーから照射され、その発生点からさらに遠くへ進む際に広がる角度を表しています。
基本的に、ビーム発散角が小さいほど、レーザーが長距離にわたって焦点を合わせ続けることを意味し、ビーム発散角が大きいほど、レーザーが進むにつれて広がりが大きくなることを意味します。
樹冠透過への影響
森林のような環境では、通常、ビーム発散角が小さいほど(ビームがより集中して)、樹冠を透過して下の地面に到達するのに効果的です。これは、レーザービームがより集中すると、葉と枝の間の隙間を透過しやすくなり、結果としてグラウンドポイントの検出精度が向上するためです。一方、ビーム発散角が大きいレーザーは樹冠からの散乱が多くなり、効果的に林床に到達しない可能性があります。
点密度と解像度への影響
より集中したビーム(発散角が小さい)ほど、正確で解像度の高い結果が得られますが、発散角が大きいビームは各パルスでより広いエリアに広がるため、対象物の点密度と解像度が低下する可能性があります。
範囲とエネルギー分布への影響
ビーム発散角が小さいレーザーは、より長い距離にわたってエネルギー集中を維持します。これは、長距離で動作する必要があるLiDARシステムに不可欠です。ビーム発散角が大きくなると、エネルギーはより広い範囲に広がり、特に長距離ではリターン信号の強度が低下する可能性があります。
大気との相互作用
ビーム発散角は、レーザーが塵、霧、雨などの大気中の粒子とどのように相互作用するかにも影響します。発散角が大きいレーザービームは、これらの粒子との相互作用によって散乱が多くなる可能性があり、特定の条件下ではLiDARシステムの有効範囲と精度が低下する可能性があります。
サンプリングレート
サンプリングレートとは、LiDARシステムによって一定期間に収集された点の数のことです。ヘルツ(Hz)単位で測定されます。サンプリングレートが高いほど、1秒あたりにより多くの点が収集されることになり、結果として点群密度が高くなります。
ただし、サンプリングレートが高いほどより多くのデータが収集されることになるため、ファイルサイズが大きくなり、後処理時間が長くなる可能性があります。したがって、LiDARシステムのサンプリングレートは、プロジェクトの特定の密度ニーズに基づいて慎重に選択する必要があります。
サンプリングレートだけでLiDARデータの精度が決定されるわけではないことに留意してください。レーザービーム発散角、IMUおよびGPSの精度など、他の要因もデータ精度を決定する重要な役割を果たします。
IMUキャリブレーション
LiDARの精度はIMUの精度と密接に関係しています。ドローンが一定のペースで飛行すると、IMUの精度が低下する可能性があります。このため、ほとんどの航空機搭載LiDARシステムでは、飛行前、飛行中、飛行後にIMUのキャリブレーションが必要です。IMUがキャリブレーションされていないと、データが不正確になり、LiDARデータに依存するその後の分析や用途に影響を及ぼす可能性があります。
ドローン飛行中にIMUをキャリブレーションするには、「8の字」キャリブレーションと「加速-減速」キャリブレーションという2つの一般的な方法があります。手動と自動のどちらのキャリブレーション方法でも、同じ結果が得られます。
DJIの統合LiDARシステムでは、「加速-減速」キャリブレーション方法を採用しており、IMUキャリブレーションプロセスは、飛行ミッション時に自動的に完了します。DJI LiDARシステムの手動飛行時、DJI Pilotアプリは一定の飛行時間後にIMUを再キャリブレーションするようユーザーに通知します。
性能に影響する要因
効率と透過率は、LiDAR技術のさまざまな要因の影響を受ける可能性があります。ビーム発散角と複数リターンは透過に影響しますが、IMUキャリブレーションは精度に影響します。ストリップの位置合わせは精度に影響し、各種のスキャン方法は垂直スキャンの範囲と密度に影響します。飛行速度とサンプリングレートも密度に影響します。
密度に影響する要因:
- Flight Speed: A slower flight speed allows for a higher point density since the LiDAR sensor has more time to send out laser pulses and detect their returns.
- サンプリングレート:飛行速度や高度などの他の要素が一定であると仮定すると、パルス繰り返し周波数(PRF)またはサンプリングレートが高いほど、点密度が高くなります。
- 飛行高度:低高度で飛行すると、通常、地上でのレーザーパルスのフットプリントが小さくなるため、点密度が高くなります。
- 重複:飛行ラインが重なり合う測量では、重なり合うエリアの点密度が高くなる可能性があります。
- 地形と植生:密生した森林のような特徴によって、単一のレーザーパルスから複数のリターンが発生する可能性があり、そのエリアの実効密度が高くなる可能性があります。
- 飛行速度:飛行速度が遅いと、LiDARセンサーがレーザーパルスを照射してそのリターンを検出する時間が長くなるため、点密度が高くなる可能性があります。
生LiDARデータの処理
点群密度
密度は、単位面積あたりで収集されたLiDAR点の数を表します。多くの場合、1平方メートルあたりの点数(pts/m^2)で表されます。たとえば、密度が10 ps/m^2の場合、調査対象エリアの1平方メートルごとに平均して10個のLiDARリターンポイントがあることを意味します。各垂直産業ごとに、点群密度に対するさまざまな要件があります。
- 測量とマッピング:縮尺1:500のマップの場合、必要な点群密度は16点/平方メートル以上です。
- 送電線検査:樹木障壁の詳細な分析や徹底した検査を行うには、通常、送電線に25点/平方メートル以上が必要です。仕様によっては、さらに高い密度が要求され、最大50点/平方メートル、さらには250点/平方メートルが要求される場合もあります。
- 森林調査:個々の樹木のセグメント化の要求を満たすには、20点/平方メートル以上の点群密度が必要です。
生の点群処理ソフトウェアには、通常、点密度を調整する機能もあります
LiDAR高度精度の検証
高度チェックポイントを使用したLiDARデータ精度の検証は、派生デジタル高度モデル(DEM)またはデジタル地形モデル(DTM)が地面を正確に再現していることを確認する一般的な方法です。
高度チェックポイントを設定するための原則:
- チェックポイントを均等に分散し、目立つ位置に配置する必要があります。
- フライトストリップが重なっている場所や急激な高度変化がある場所には配置しないでください。
- チェックポイントは開けた平らな面に配置する必要があります。
- チェックポイントの高度基準を、レーザー点群の高度基準と一致させる必要があります。
高度チェックポイントのガイドライン:
- チェックポイントを明確な場所に均等に分散します。
- 飛行経路が交差する場所や、対地高度が急激に変化する場所には配置しないでください。
- 開けた平らな地面である必要があります。
- 高度がLiDARデータで使用されている高度と一致していることを確認してください。
LAS点群形式
LAS形式は、さまざまな企業や機関の間でLiDAR点群データの交換を可能にするために、米国の写真測量およびリモートセンシング協会(ASPRS)によって開発されました。LAS形式は、各点の位置、強度、分類、その他の属性に関する情報を含む、LiDAR点群データを保存および交換するための標準化されたファイル形式です。これは、DJIのLiDARシステムから取得できる成果でもあります。
点群データのLAS形式には、点の3次元座標、RGBカラー、反射率、GPS時間、リターン数、点がどのリターンであるかなどの情報が含まれます。
LASファイルのバージョン情報は、ファイルの読み取りや書き込みをする際に問題となる可能性があります。使用しているLASファイルのバージョンが、その処理に使用しているサードパーティ製ソフトウェアと互換性があることを確認することが重要です。一部のサードパーティ製ソフトウェアでは、特定のバージョンのLASファイルの読み取りや書き込みができない場合があります。互換性の問題が発生した場合は、別のバージョンのLASファイルを使用するか、使用しているバージョンをサポートする別のサードパーティ製ソフトウェアを探す必要がある場合があります。DJI TerraがエクスポートするLASバージョン1.2形式のLiDAR点群データは、互換性の高いバージョンのLASファイルです。
点群のカラー化
点群データをカラー化することでコンテキストが追加され、データの解釈と把握が容易になります。たとえば、建物と樹木は、ある面では類似する構造形状を備えていますが、色によって即座に区別することができます。
ほとんどの航空LiDARシステムは、LiDARデータを収集すると同時に高解像度画像を撮影するRGBカメラを搭載しています。これらの画像を使用して、対応するLiDAR点に色の値を割り当てることができます。
カラー化の利点:
- 視覚的なアピール:カラー化された点群は、グレースケールの点群よりも視覚に訴えるため、理解しやすくなります。
- 分析の強化:色によって追加された情報は、さまざまな種類の植物を区別する植生分析や、都市マッピングによるさまざまなインフラの区別に役立ちます。
- 他のデータセットとの統合:カラー化された点群は、他の地理空間データセットと簡単に統合できるため、調査対象エリアを包括的な視点で捉えることが可能になります。
- 追加の写真測量プロセス:RGB写真は、点群のカラー化に加えて、写真測量処理にも使用できます。
飛行軌跡
軌跡とは、データ収集中にLiDARシステムを搭載したUAVが飛行した経路のことです。軌跡がLiDARデータ処理において重要な要素であるのは、点群内のすべての点の位置データを提供するからです。軌跡情報は、LiDARデータを正確に地理参照して、調査対象エリアの正確な3Dモデルを作成するために必要です。
SBETとはSmoothed Best Estimate of Trajectory(平滑化された軌跡の最良推定値)のことです。これは一般的に使用されている後処理ファイル形式で、高精度のGPSおよびIMUデータを含んでいます。この形式の軌跡ファイルは、さらなる後処理のためにLAS点群と相関させることができます。LiDARミッションの後処理軌跡ファイルは、通常、実行可能な点群LASファイルとともに自動的に生成されます。軌跡を表示するために、サードパーティ製ソフトウェアにインポートできます。
ストリップ調整
ストリップ調整は、航空機のLiDARデータの系統的なエラーと不整合を修正するための手順であり、特に、データが複数のフライトストリップ上で収集された場合に実行します。航空機のLiDARを使用して地形を調査する際、そのエリアは通常、複数の重なり合うストリップまたは飛行経路でカバーされます。この重複は、カバーする範囲の連続性を確保し、エラー修正を容易にするために、意図的に行われます。
LiDARデータの取得中に、いくつかの要因によってデータにエラーが発生する可能性があります。
- センサードリフト:時間の経過とともに、IMUとGPSの読み取り値に若干のズレが生じる場合があります。
- 飛行力学:乱気流、急激な高度変化、航空機の向きの変化が撮影データに影響を与える可能性があります。
これらの要因により、隣接するフライトストリップに垂直方向または水平方向の不一致が表示される場合があります。これらのエラーを修正しないと、LiDARデータに依存するその後の分析や用途に影響を及ぼす可能性があります。
ストリップ調整の利点:
- データ整合性の向上:不一致を減らし、隣接するフライトストリップ間の連続性を確保します。
- より高品質の派生物:デジタル高度モデル(DEM)やデジタルサーフェスモデル(DSM)などの派生物の品質が向上します。
- 信頼性:LiDARデータセットの精度に関する信頼性が向上し、地形マッピングから林業まで、さまざまな用途における信頼性が高まります。
DJI Terraソフトウェアによる生LiDARデータの処理
DJI Terraソフトウェアは、DJI LiDARシステムから収集された生のLiDAR点群データを処理し、ユニバーサルLAS形式でエクスポートするための唯一のサポートソフトウェアです。
主なLiDARの処理機能
DJI Terraは、LiDAR生データからLAS点群情報を作成できる、LiDAR生データ処理ソフトウェアです。豊富な追加機能も搭載されています。
点群密度の調整
単位面積当たりの収集された点の数です。この機能を使用して、特定の業界の需要に合わせて点密度を調整できます。
点群精度の最適化
この機能は、ストリップの局所保存投影(LPP)アルゴリズムを使用して、点群の一般的な階層化現象を最小限に抑え、点群をより薄いレイヤー上に整列させて、点群モデルの精度を向上させます。
点群の平滑化
この機能は、ノイズを除去し、エラーの影響を軽減して点群を調整し、より滑らかな視覚表現を作り出します。
グラウンドポイント分類
グラウンドポイントを点群内の他の物体と区別して、デジタル高度モデル(DEM)を生成するために使用します。
DEMの生成
この機能は、分類されたグラウンドポイント群からGeoTiFF形式のデジタル高度モデル(DEM)を生成します。
垂直精度のチェックとシフト
高度チェックポイントを使用してLiDARデータの精度を検証し、派生したDEMまたはDTMが地面を正確に再現していることを確認します。
座標系変換
世界中のさまざまなマッピングおよび調査プロジェクト用に、局所投影座標系または測地座標系を簡単に変換できます。
航空機搭載LiDARの用途
森林管理
LiDARは森林管理において幅広い用途があります。樹高を推定し、バイオマスを測定し、森林構造をマッピングできます。LiDARを使用して、従来の調査方法では得られなかった森林樹冠に関する詳細な情報を取得できます。LiDARの主な利点の1つは単一レーザーパルスから複数のリターンを検出できる能力であり、これにより植生を「見通し」て、地表面を正確にマッピングすることができます。この機能は、特にLiDARによる地面高度の推定や、経時的な森林被覆変化の特定を可能にし、森林伐採や森林再生の取り組みを追跡するのに役立ちます。さらに、LiDARは、持続可能な森林管理に不可欠な森林調査の開発にも役立っています。
容積測定
LiDAR技術が提供する正確な容積計算のための測定は、採鉱、建設、林業などの産業に役立っています。LiDARの点群データを使用することで、備蓄量や現場からの搬出量を正確に計算することができます。この情報は在庫管理、コスト管理、資源計画に利用できます。
地形測量
LiDARは、地表の形状や特徴を正確に把握できるため、言うまでもなく地形測量に効果的なツールです。写真測量とは異なり、LiDARは植生が密生しているエリアであっても、樹冠を透過して正確な地表測定値を取得できます。これは、LiDARがレーザーパルスを使用して葉と葉の隙間から地面や樹冠を検出し、結果としてグラウンドポイントの検出性能が向上するためです。
考古学研究
航空機搭載LiDARを考古学研究に使用して、広大で到達しにくいエリアのマップを作成し、地表に隠された構造物を簡単に発見できます。LiDARセンサーは植生を透過して高解像度データを取得できるため、地上から見ることが困難であったり不可能な構造物を特定することが可能になります。これは、考古学者が古代都市や集落の配置をより深く理解し、過去の人間活動についての洞察を得るのに役立ちます。
送電線検査
LiDAR技術を使用して送電線を検査できますが、送電線の高さや位置によっては検査が困難な場合があります。LiDAR点群データを利用することで、送電線やその周辺の詳細なマップを作成できます。これは、停電や安全上の問題の原因となる、植生の成長や電線の垂れ下がりなどの潜在的な問題を特定するのに役立ちます。
インフラの検査
LiDARは小さな欠陥や亀裂を検出できるため、多くの人がこの技術を使用して道路や建物/橋の外観をスキャンしています。 これは、プロジェクトマネージャーに直ちに解決する必要がある構造の問題を警告するのに役立ちます。 特に構造の撮影では、外観に面するようにジンブル化されたLiDARシステムを実装することが重要です。