
In working to push the UAS and renewable industry forward, a long-term DJI end-user and multinational manufacturer and distributor of electricity and gas brought together industry stakeholders to validate the capability of a drone in the box system to complete comprehensive inspections of a Texas 181 MWDC solar farm. This marked the first inspection of a solar farm with DJI Dock in North America.
Stakeholders on site included DJI a leader in enterprise drone innovations and the manufacturer of DJI Dock, UVT who equips organizations nationwide with the most advanced drone and robotic technology through a diverse catalog of vetted enterprise solutions, and Raptor Maps who is building the solar industry’s integrated operating system, enabling solar to scale and meet global climate goals.
%20Solar%20Farm%20Inspection%20Conducted%20in%20North%20America/Dock%20Solar%20Inspection%20-%20DJI%2c%20Raptor%20Maps%2c%20Enel%2c%20UVT.png?width=840&height=450&name=Dock%20Solar%20Inspection%20-%20DJI%2c%20Raptor%20Maps%2c%20Enel%2c%20UVT.png)
Capabilities & setup considerations
The DJI Dock provides the ability to remotely operate a Matrice 30T Dock Version drone to fly pre-programmed inspection routes or utilize live flight controls, simultaneously capturing visual and radiometric 640x512 thermal imagery with built in capabilities for charging, data offload, weather detection, RTK, and redundancy.
Site selection
UVT worked directly with the client to determine an optimal location for deployment of the DJI Dock. Key considerations included power, internet, and a generally clear area directly surrounding the system. The top of the Connex building was determined to be the optimal spot for the test as it met all requirements and provided a secure and clear location.
After arriving on site the UVT team led the setup and deployment of the DJI Dock following manufacturer specifications including configuration, connections, and grounding with the assistance of the client and DJI teams on site.
To reduce the flight time and battery use to inverter blocks at the edge of the array, installation in a more central location would be considered for future drone in the box deployments. It is also important to consider routine maintenance for the system.
%20Solar%20Farm%20Inspection%20Conducted%20in%20North%20America/Dock%20Solar%20Inspection%20-%20Dock%20on%20the%20roof.png?width=840&height=450&name=Dock%20Solar%20Inspection%20-%20Dock%20on%20the%20roof.png)
Mission planning
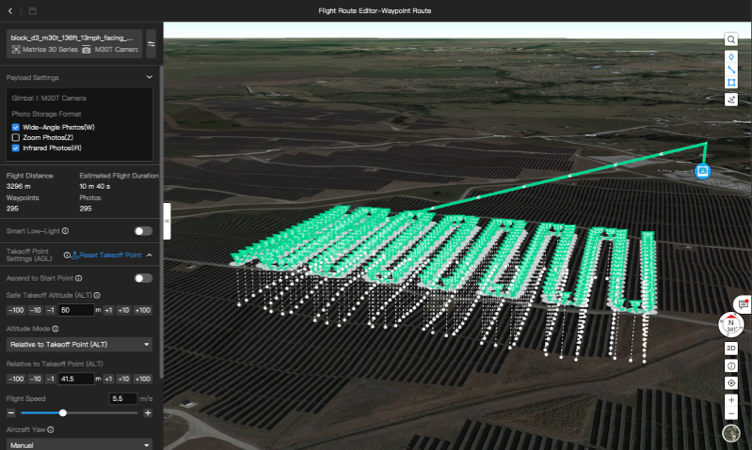
Mission planning was built around Raptor Maps’ standard data capture requirements ideal for preventative maintenance. These standards required a thermal resolution of 5.5 cm/px, flight height of 40 meters, front overlap of 70%, side overlap of 20%, and gimbal pitch coinciding with the panel tilt. The drone was able to fly at a flight speed of 5.5 m/s during data capture based on the photo interval capture of 2 seconds.
Raptor Maps created a custom software tool to generate waypoint missions following the above standards for the DJI system based on the electrical layout of different inverter blocks. Based on the mission planning, the drone was able to ascend to a safe altitude for flight to and from the inverter blocks, which can be flown at up to 15m/s. The waypoint missions were imported into the FlightHub 2 system for automatic execution. The DJI Dock can be controlled and monitored through DJI’s FlightHub 2 software or a custom private/public software implementation.
Though the Dock demonstrated the capability to run completely remotely and cover the entire solar farm, based on FAA regulations a pilot with a remote controller and capability to take control of the drone at any time did observe all missions. Submitting a shielded waiver application is being evaluated which would enable drone in the box operations without the requirement of a pilot observing the drone on site.
Data capture
Flight and battery charging time are important considerations for data capture. The Matrice 30T drone has a max flight time of 41 minutes and can charge from 20-90% in 20 minutes. The drone battery charges to 90% by default to help elongate the life of the battery to meet the 400 charge cycles it is rated for; however scheduled missions can utilize 100% battery charge. The Dock system automatically calculates if returning to home is necessary during a mission based on the wind and drone location making sure the drone has at least 15% battery when landing in the Dock.
Flights were completed in wind at 10 m/s, which is slightly below the max wind speed whereby the drone can takeoff and land from the Dock (12 m/s). The anemometer on the Dock provided live wind speed data and an alternate landing point was available in case there was an emergency situation where the drone was not able to land back in the Dock.
Though inverter blocks were a variety of shapes and sizes, the average data capture time was calculated conservatively at about 5 minutes per megawatt. The round-trip flight time to and from an inverter block depended on location and wind speed ranging from a total of 3 to 9 minutes utilizing approximately 10-30% of the battery. The ability to fly 2.5 km (5 km round trip) to a block and complete an inspection was demonstrated.
%20Solar%20Farm%20Inspection%20Conducted%20in%20North%20America/Dock%20Solar%20Inspection%20-%20FlightHub%202%20screenshot.png?width=840&height=410&name=Dock%20Solar%20Inspection%20-%20FlightHub%202%20screenshot.png) DJI Dock control interface through FlightHub 2
DJI Dock control interface through FlightHub 2
Data offload & analysis
Data is offloaded from the drone to the Dock, then pushed to cloud storage from the Dock, and automatically deleted from devices. In our tests, we found that in running repeated missions constantly capturing over 4GB of visual and thermal photos per block, the offload and upload process lagged a bit behind the charging/data capture. However, as the drone is able to keep flying missions even if data offload has not been completed, maximizing data capture in times of good irradiance and finishing data upload at night or during down time was an acceptable workflow given the wired internet connection of the dock provides sufficient uploading speed.
In addition to the necessary mission planning software, Raptor Maps ingests the data that was pushed to cloud storage. The imagery and associated flight path metadata are used to identify and categorize equipment anomalies by severity. This also includes calculating temperature deltas from the M30T’s radiometric thermal camera, which are then geo-referenced to a digital twin in Raptor Maps’ platform. The combination of the digital twin and geo-referenced analyses enables solar asset owners to easily find and address equipment issues, maximizing power production and minimizing the guesswork needed for proper remediation. This type of end-to-end solution is required for the Dock to be enabled for solar inspections.
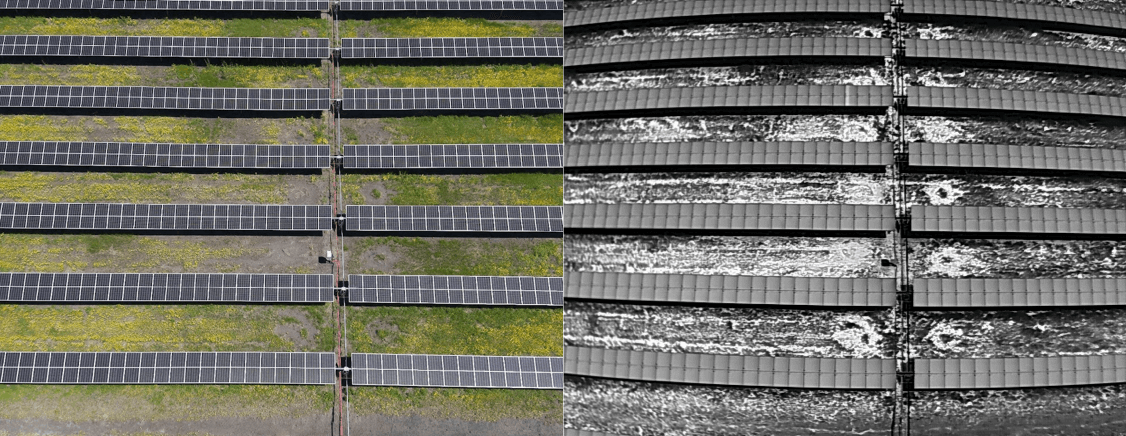 Can you spot the malfunctioning panel?
Can you spot the malfunctioning panel?
Hint: in the IR image, look for the lighter-colored panel in the 3rd row from the top.
Supplemental inspections
Additional testing was also completed on site of other infrastructure including the substation and overhead lines. The team was able to demonstrate the ability for a flight to be flown once by the client company's in-house drone pilot to collect necessary data and then repeated by the Dock system on demand along with the ability to generate a point cloud and use it within FlightHub 2 for mission planning. Assessing vegetation, construction progress, and monitoring other infrastructure on site such as fencing along with routine or on-demand security patrols could also be accomplished by the system.
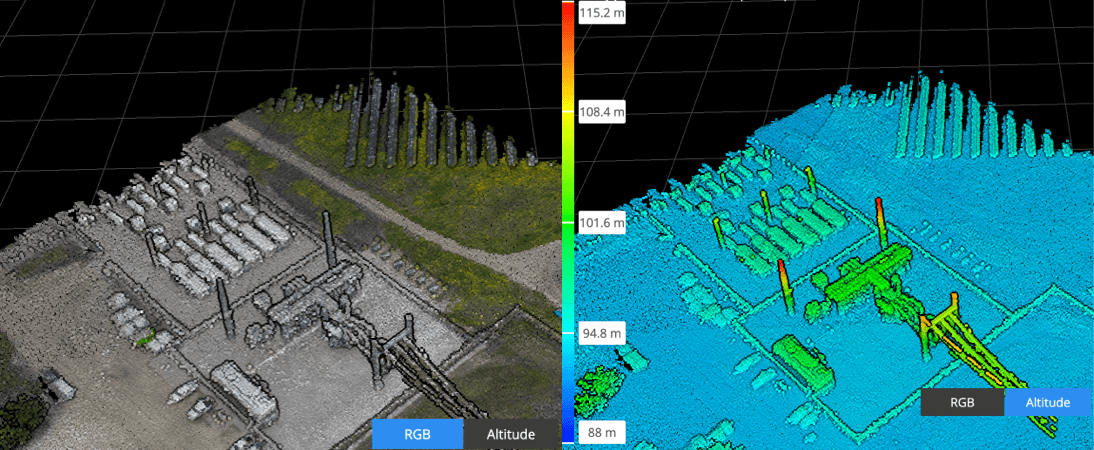 Substation Point Cloud RGB & Point Cloud Altitude
Substation Point Cloud RGB & Point Cloud Altitude
Looking to the future the team also sees potential for the ability to complete a supplemental inspection based on the Raptor Maps inspection report where a mission would be automatically uploaded to the Dock prompting the drone to return to the issue area and collect more detailed imagery and panel information. Though there was interest in reading SN on the panel the location of the SN was a limiting factor in this test.
Executive summary
With a collaborative effort that would not have been possible without all teams involved, stakeholders were able to work together to understand the capability of the Dock system for solar inspections following the adage crawl, walk, and then run.
Crawl (Pre-Project)
The crawl comes before the drone-in-the-box with variables such as establishing an internal UAS program with policies and standard operating procedures, remote pilot training with an aviation mindset, understanding how to capture data, and integrating the results into the pipeline of everyday operations for decision makers to utilize. Building relationships within the industry across software, hardware, procurement and support was valuable for this collaboration as well.
Walk (Project)
Determining a test site and deployment strategy based on the system capabilities and requirements was key to a successful deployment. Based on completed flights and charging time the team estimates that data can be conservatively collected with the dock at a rate of 5 MW per hour following Raptor Standard guidelines, (operations on site reached ~7MW an hour). With 6 hours a day of flight time based on irradiance, this would lead to data capture for the entire 181MW farm being completed in approximately 6 working days.
Even without a beyond visual line of sight waiver in the current stage, stakeholders saw value in being able to plan, save, and repeat missions remotely on-demand along with the elimination of numerous on-site tasks for a pilot including charging, updates, flight planning, and data offload/upload. The ability to collect nearly identical follow up imagery, and accomplish other important tasks with the drone after the inspection has been completed on site provides additional value and helps the operations team optimize output at the end of the day.
Run (Future)
When thinking of running into the future variables including dock location, capture speed, and automated flight planning based on issues found and panel angle can help streamline the process. A BVLOS waiver for the site would enable cost-savings on annual or bi-annual standard inspections which vary in price along with reducing labor costs that reach an estimated $12,000 annually on ancillary data capture by an on-site pilot and the supporting staff.
We hope this document was able to provide useful information for you as we all work to push the industry forward together.
About Raptor Maps
Raptor Maps is building solar’s integrated operating system, enabling the industry to scale and meet global climate goals. With intelligence for the entire solar industry, our solar lifecycle management platform (Raptor Solar) provides the tools and the system of record that asset owners, managers, O&M, developers, and EPCs need to build, maintain, and expand their solar plants. At the core of the platform are continuously evolving, geo-referenced digital twins of your solar assets, which integrate with the data sources you need to derive actionable insights. Raptor Solar bridges the gap between insight and action, improves asset health and power production, reduces risk, and ultimately increases the rate of return of solar assets. To learn more about Raptor Maps or to schedule a demo, contact us at raptormaps.com/contact.
About UVT
UVT equips organizations nationwide with the latest in drone and robotics technology, training, and support. We partner with you to provide end-to-end turnkey solutions custom-tailored to your mission. Our comprehensive services include a diverse catalog of vetted enterprise hardware and software solutions, consultation, site surveys, installation, and education for seamless deployments. All of this backed by a suite of technical and operational fleet support services to help your organization maximize the benefits of our technology. To learn more, visit our website at www.uvt.us.




-3.png?width=300&name=Insight%20blog%20featured%20image%201140X660%20(2)-3.png)