
La cinemática de posprocesamiento (PPK) es un método que emplea datos del sistema global de navegación por satélite (GNSS) para determinar con precisión la posición y trayectoria de un vehículo explorador/dron. La PPK consiste en recopilar datos del GNSS sin procesar de un dron, junto con información sobre la posición y la trayectoria de las estaciones de referencia cercanas, y procesar los datos posteriormente para mejorar la precisión de la información sobre la posición y la trayectoria.
La PPK se utiliza habitualmente en aplicaciones como la topografía, la cartografía y la agricultura de precisión, donde es fundamental un posicionamiento de alta precisión. A diferencia del posicionamiento cinemático en tiempo real (RTK), que requiere una conexión inalámbrica en tiempo real con las estaciones de referencia, la PPK puede realizarse con posterioridad, lo que permite una mayor flexibilidad en la recopilación de datos.
El posprocesamiento de datos del GNSS implica el uso de software especializado para analizar los datos sin procesar recopilados por el receptor y compararlos con datos de estaciones de referencia cercanas a fin de determinar la ubicación precisa del dron en un punto dado en el tiempo. Este proceso puede mejorar la precisión de la información sobre posición y trayectoria corrigiendo los errores introducidos por factores como las condiciones atmosféricas y las desviaciones de la órbita del satélite.
A pesar de que se pueden usar tanto el posicionamiento de RTK como el posicionamiento de PPK en aplicaciones de cartografía con drones, hay ciertas ventajas de utilizar la PPK en lugar de la RTK:
|
Puntos a favor |
Puntos en Contra |
|
|
RTK |
Información en tiempo real: con la RTK, se dispone de información en tiempo real durante la misión, lo que puede facilitar la identificación y resolución de problemas a medida que surgen. Procesamiento rápido de datos: los datos de la RTK pueden procesarse rápidamente, lo que permite un plazo de entrega más corto del producto final. Fácil de usar: la RTK suele ser más fácil de usar que la PPK y requiere menos conocimientos para su configuración y funcionamiento. |
Menor precisión: la precisión de la RTK puede verse afectada por retrasos e interrupciones en las comunicaciones, lo que la hace menos precisa que la PPK. Dependencia de la comunicación: la RTK requiere comunicación en tiempo real con una estación de referencia durante la misión, lo cual puede ser complicado en zonas remotas o rurales con cobertura celular limitada o inexistente al utilizar la RTK a través del protocolo NTRIP. Costos más altos: la RTK puede ser más caro que la PPK debido a la necesidad de módulos de RTK adicionales o a las cuotas de suscripción al servicio del NTRIP. |
|
PPK |
No se requiere comunicación en tiempo real: la RTK requiere comunicación en tiempo real entre el dron y la estación terrestre para recibir datos de corrección de la estación de referencia. En cambio, la PPK no requiere comunicación en tiempo real, ya que los datos de corrección se aplican más tarde, durante el posprocesamiento. Mayor flexibilidad: con la PPK, el dron puede realizar la misión y recopilar los datos, y el posprocesamiento puede hacerse más tarde, lo que proporciona una mayor flexibilidad para la recopilación de datos, especialmente en zonas con cobertura celular limitada o inexistente. Mayor exactitud: aunque tanto la RTK como la PPK pueden proporcionar una gran precisión, la PPK puede ofrecer una precisión aún mayor, ya que no está sujeta a posibles retrasos o interrupciones de las comunicaciones durante la recopilación de datos. La PPK también puede utilizar más estaciones de referencia durante el posprocesamiento, lo que puede mejorar aún más la precisión. Costos reducidos: la PPK puede ser menos costosa que la RTK, ya que no requiere comunicación en tiempo real, lo cual podría implicar el uso de equipo adicional y tarifas de suscripción. | |
Mayor tiempo de posprocesamiento: la PPK requiere un posprocesamiento de los datos, lo que puede requerir tiempo y retrasar la entrega del producto final. Mayores requisitos de capacitación: la PPK requiere un mayor nivel de conocimientos para realizar el posprocesamiento de los datos, algo que quizá no esté al alcance de todos los usuarios. Requisito de duración mínima de vuelo: para obtener datos de posicionamiento precisos, es necesario capturar suficientes puntos de datos del GNSS durante el vuelo. Esto significa que el dron debe volar durante un tiempo y a una distancia determinados para capturar suficientes puntos de datos para el procesamiento de la PPK. La duración exacta y la distancia requerida dependerán de varios factores, como el receptor del GNSS utilizado, la calidad de los datos de la estación de referencia y el entorno de vuelo. En general, se recomienda una duración mínima de vuelo de 10 minutos para capturar suficientes puntos de datos del GNSS para un procesamiento de la PPK preciso. Sin embargo, esto puede variar en función de los requisitos específicos del proyecto cartográfico y de la calidad de los datos del GNSS recopilados. |
La selección de la PPK o la RTK para un proyecto cartográfico depende, en última instancia, de requisitos específicos, como la flexibilidad, el costo y la escala de la misión. Aunque ambos métodos tienen sus ventajas e inconvenientes, los drones DJI Enterprise RTK siempre registran datos de observación por satélite. De esta manera, incluso si hay interrupciones en la comunicación en tiempo real debido a un entorno celular inestable durante un vuelo de RTK, el usuario puede recuperar los datos de la estación base y utilizar el método de PPK como respaldo para obtener datos precisos a nivel de centímetros.
Preparación de hardware y software para PPK
|
Hardware del UAV y cargas útiles (una de las opciones proporcionadas) |
Matrice 350 RTK + Zenmuse P1 |
|
Software de planificación de misiones de vuelo |
DJI Pilot 2 app |
|
Fuente para el archivo de intercambio independiente del receptor base (RINEX) y los archivos de navegación |
DJI D-RTK 2 Base Station |
| Software de PPK especializado (una de las opciones proporcionadas) |
Propeller Aero |
| Software de fotogrametría |
DJI Terra |
Flujo de trabajo
Llevar a cabo un proceso de PPK con datos de imágenes de drones puede parecer complicado, pero, en realidad, es un proceso sencillo que requiere una planificación y ejecución cuidadosas. El proceso implica varios pasos clave, que se analizarán con más detalle en las instrucciones que aparecen a continuación.
- Ajustes y preparativos: antes de empezar a recopilar datos del dron, es necesario planificar cuidadosamente la misión. Esto incluye garantizar que la duración del vuelo sea adecuada y activar algunos ajustes dentro de la aplicación DJI Pilot. Con una planificación minuciosa de la misión, puede asegurarse de capturar datos suficientes para un procesamiento de la PPK preciso.
- Recopilación de datos de drones: después de planificar la misión, se recopilan los datos de imagen del dron y los datos del GNSS correspondientes del receptor del dron durante el vuelo. En los datos del GNSS deben incluirse los datos sin procesar del sistema de navegación por satélite, así como información sobre las marcas de tiempo. Es importante recopilar tantos datos como sea posible para garantizar un procesamiento de la PPK preciso.
- Recopilación de datos de referencia: además de recopilar datos de drones, también es necesario recopilar datos de referencia de estaciones de referencia del GNSS cercanas, como CORS u otros receptores terrestres. Los datos de referencia deben incluir las mismas señales del GNSS e información de temporización que los datos del GNSS del dron. Mediante la recopilación de datos de referencia, puede asegurarse de que los resultados de PPK sean lo más precisos posible.
- Sincronización de datos y procesamiento de la PPK: una vez que haya recopilado todos los datos necesarios, deberá sincronizar los datos de imagen del dron con los datos del GNSS correspondientes basándose en la información de temporización. Esto puede hacerse mediante herramientas de software especializadas que pueden hacer coincidir la información de temporización entre la captura de la imagen y el punto de datos del GNSS. Después de sincronizar los datos, puede procesarlos mediante software de PPK especializado o servicios en línea. El procesamiento de la PPK utiliza los datos del GNSS tanto del receptor del dron como de las estaciones de referencia para calcular la información de posicionamiento precisa de cada imagen capturada durante el vuelo.
- Sobrescritura de datos del POS: asegúrese de que los nuevos datos del sistema de posición y orientación (POS) se importen correctamente en el software de fotogrametría. Este paso es fundamental, ya que la precisión de los modelos fotogramétricos depende en gran medida de la calidad de los datos de entrada. Por lo tanto, es necesario volver a comprobar la compatibilidad de los datos del POS con el software y asegurarse de que se sobrescriban correctamente.
Aunque llevar a cabo un proceso de PPK con datos de imágenes de drones puede parecer complejo, es un proceso necesario para obtener resultados cartográficos precisos. Si se planifica cuidadosamente la misión, se recopilan suficientes datos y se realizan comprobaciones de control de calidad, se puede garantizar que los resultados sean lo más precisos posible.
Ajustes y preparativos
Antes de volar su dron, es importante configurar correctamente la aplicación DJI Pilot 2. Estos son algunos consejos para garantizar un vuelo exitoso:
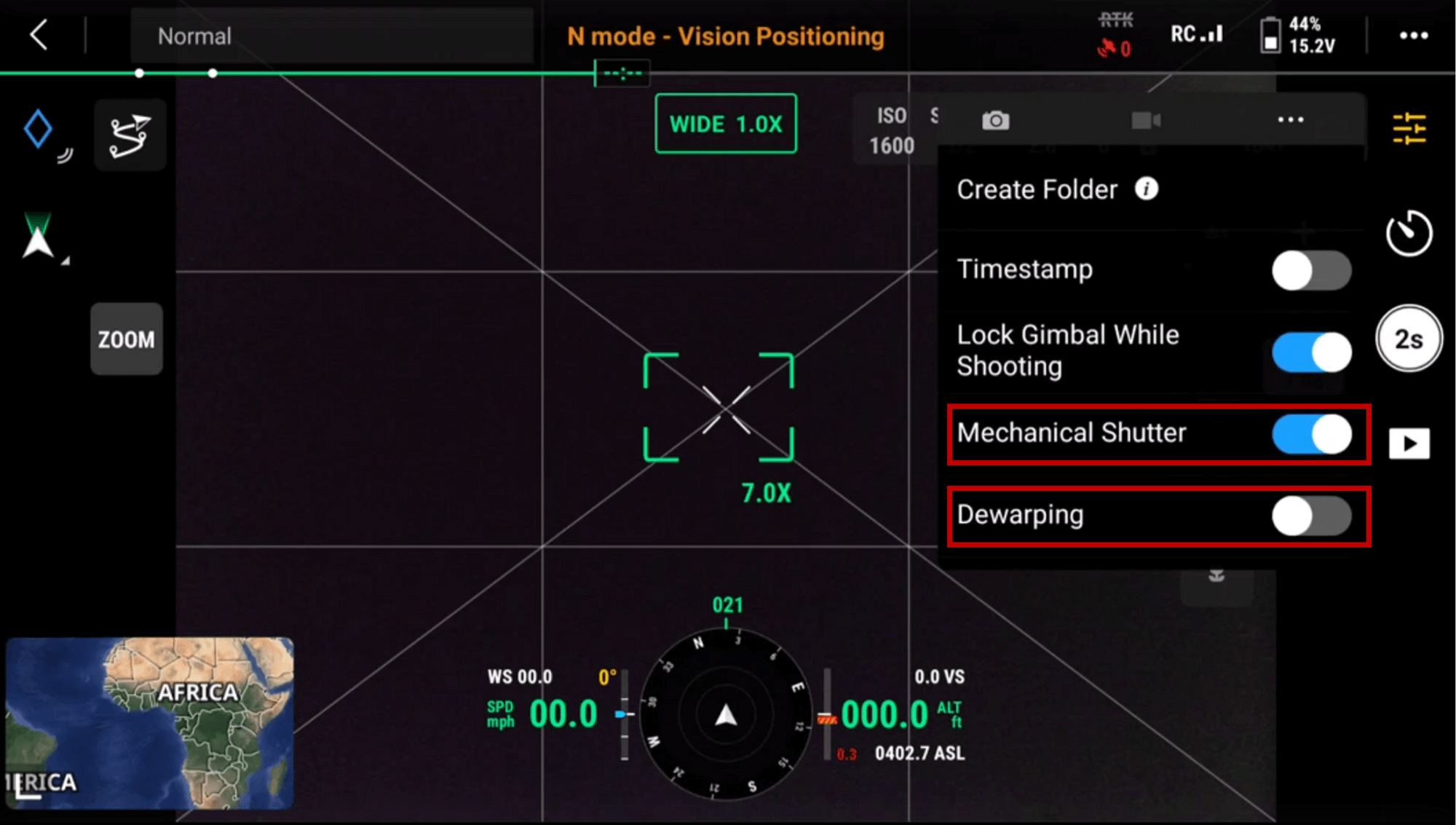
1. Active la opción “Obturador mecánico” y desactive la opción “Corrección de distorsión”.
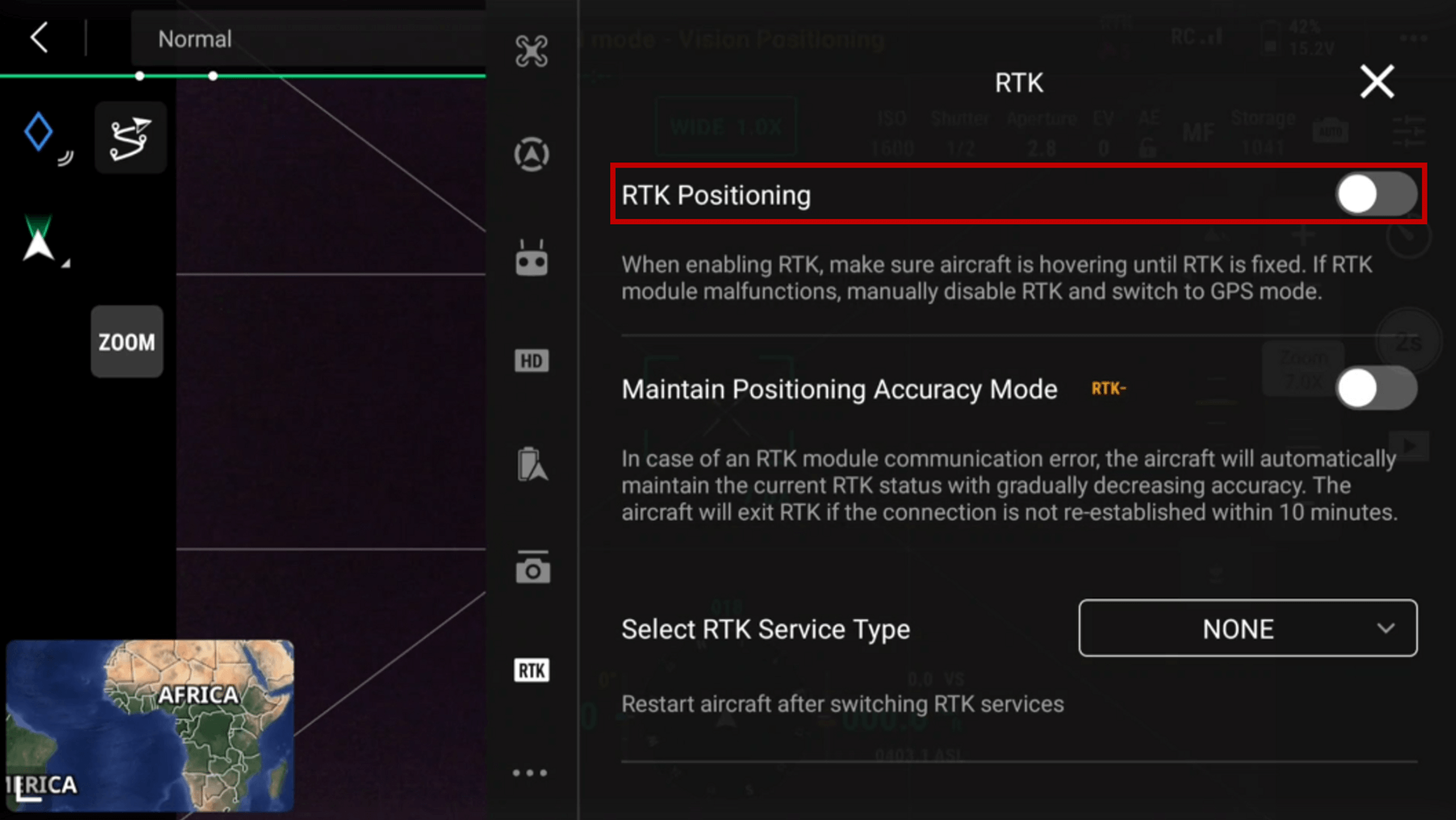
2. Asegúrese de que la opción “RTK” esté desactivada en los ajustes de la aplicación Pilot.
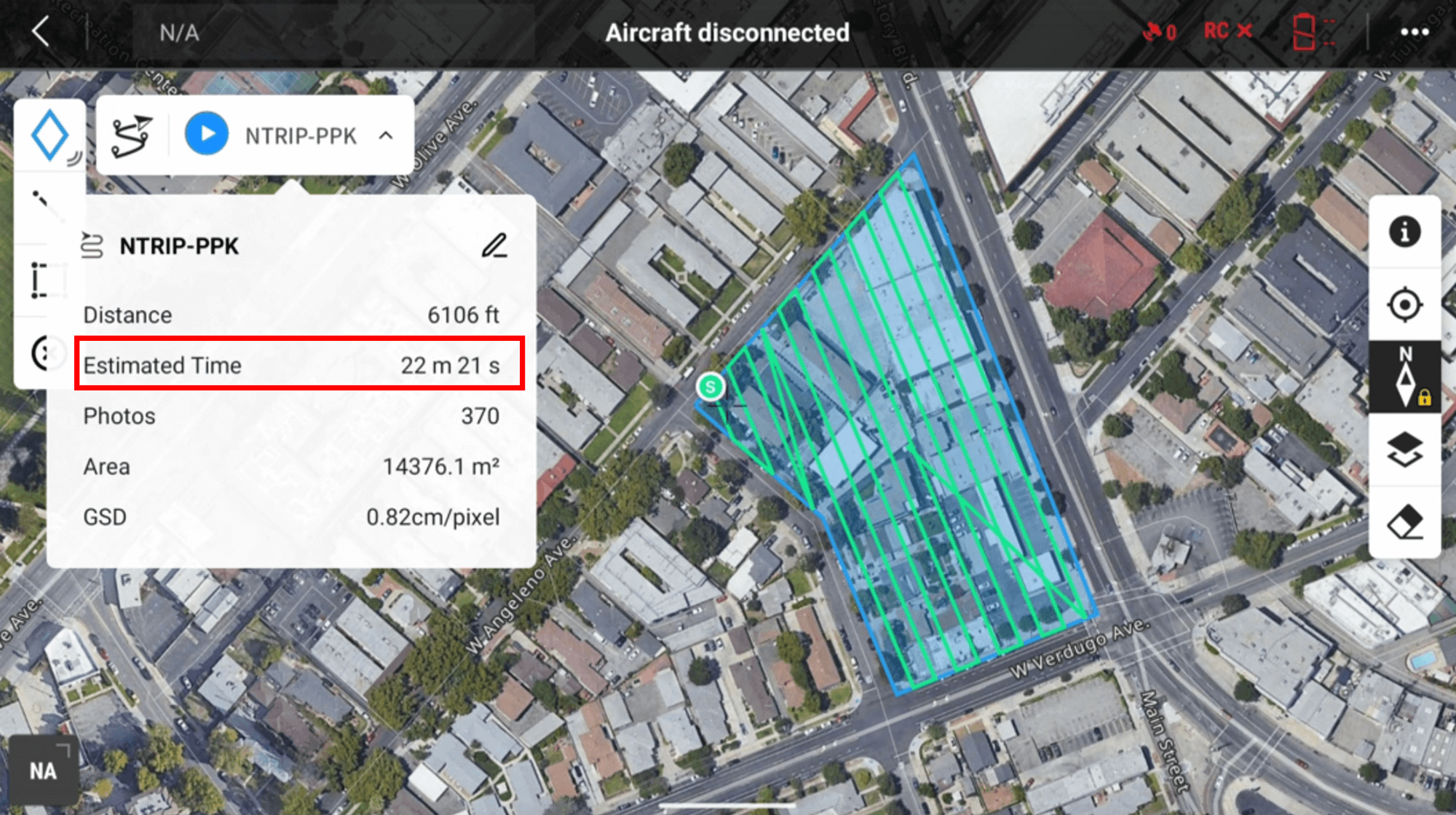
3. Es importante señalar que el proceso de PPK requiere un posprocesamiento de los datos, lo que puede requerir tiempo y retrasar la entrega del producto final. Además, para obtener datos de posicionamiento precisos con la PPK es necesario capturar suficientes puntos de datos del GNSS durante el vuelo. La duración exacta y la distancia requerida dependerán de varios factores, como el receptor del GNSS utilizado, la calidad de los datos de la estación de referencia y el entorno de vuelo. Generalmente, se recomienda volar durante un mínimo de 10 minutos para capturar suficientes puntos de datos del GNSS para un procesamiento de la PPK preciso. En la aplicación Pilot, se puede comprobar el tiempo de vuelo estimado de la misión en la pestaña desplegable de resumen de la misión.
Recopilación de datos de drones
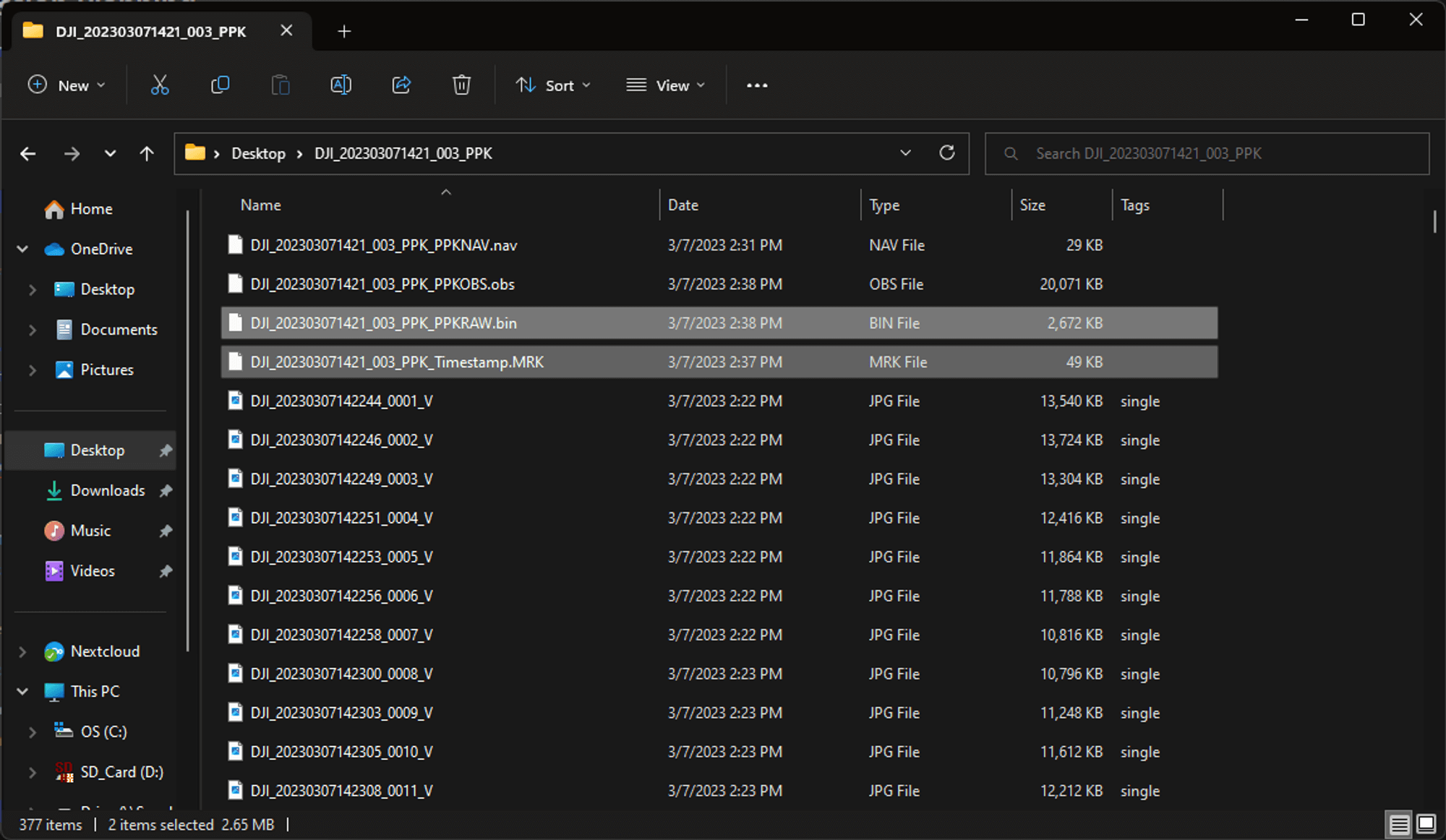
Para realizar un procesamiento adecuado con el método de PPK, son esenciales los datos del dron. Además de las imágenes sin procesar, se necesitan dos archivos adicionales de la carpeta de imágenes: el archivo de intercambio independiente del receptor de drones (RINEX) y el archivo de marcas de tiempo de la imagen.
El archivo de RINEX del dron incluye mediciones del GPS sin procesar que son fundamentales para lograr un posicionamiento de alta precisión. Estos datos se utilizan para corregir los errores en la señal del GPS que pueden producirse debido a diversos factores, como las condiciones atmosféricas y la posición de los satélites del GPS. Sin estos datos, la precisión del método de PPK se vería gravemente perjudicada. El archivo de RINEX, con el nombre “XXX_PPKRAW.bin”, se encuentra en la carpeta de fotos sin procesar.
Del mismo modo, el archivo de marcas de tiempo de las imágenes es crucial para obtener resultados precisos. En este archivo se registra la hora exacta en que se tomó cada imagen, lo que es necesario para sincronizar correctamente los datos de las imágenes con las mediciones del GPS. Sin esta información, sincronizar con precisión los datos de las imágenes con los del GPS sería muy difícil, lo que a su vez repercutiría negativamente en la precisión de los resultados finales. El archivo de marcas de tiempo, con el nombre “XXX_Timestamp.MRK”, también se encuentra en la carpeta de fotos sin procesar.
Es esencial asegurarse de que estos archivos se recopilen y procesen correctamente para lograr la mayor precisión posible con el método de PPK. Y solo unos pocos modelos de drones DJI Enterprise compatibles con la RTK/PPK son capaces de generar estos archivos, incluidos los siguientes:
- DJI M350 RTK (con cargas útiles Zenmuse P1 o Zenmuse L1 únicamente).
- DJI Mavic 3 Enterprise (únicamente con el módulo de RTK conectado).
- DJI Mavic 3 Multispectral (únicamente con el módulo de RTK conectado).
- DJI Phantom 4 RTK.
Recopilación de datos de referencia
Para llevar a cabo el procesamiento de la PPK (cinemática de posprocesamiento) mediante una estación base para los datos de referencia, normalmente se necesitan dos tipos de archivos relacionados con los datos del GNSS (sistema global de navegación por satélite), es decir, un archivo de RINEX base y un archivo de navegación:
- Archivo de RINEX base: este archivo contiene los datos del GNSS sin procesar recopilados por la estación base, normalmente en formato RINEX. El archivo de RINEX base incluye mediciones precisas de señales de satélite, posiciones e información de temporización. Por lo general, el archivo se recopila simultáneamente con el vuelo del dron o tan cerca como sea posible del momento del vuelo. El archivo de RINEX base se utiliza como referencia para corregir los datos del GNSS sin procesar recopilados por el dron durante el vuelo.
- Archivo de navegación: este archivo contiene información sobre la posición y la órbita de los satélites del GNSS utilizados para el proyecto cartográfico. El archivo de navegación se emplea en el software de PPK para calcular la información de posición precisa de cada imagen capturada durante el vuelo del dron. El archivo de navegación puede obtenerse de varias fuentes, incluidas agencias gubernamentales como el Servicio Geodésico Nacional de Estados Unidos (NGS) o servicios en línea como el Servicio Internacional del GNSS (IGS).
En esta sección de instrucciones, utilizaremos como ejemplo el sistema NGS CORS para obtener estos archivos del GNSS:
Para recopilar datos de referencia del CORS mediante el servicio UFCORS (User Friendly CORS) de la NOAA (Administración Nacional Oceánica y Atmosférica), siga estos pasos:
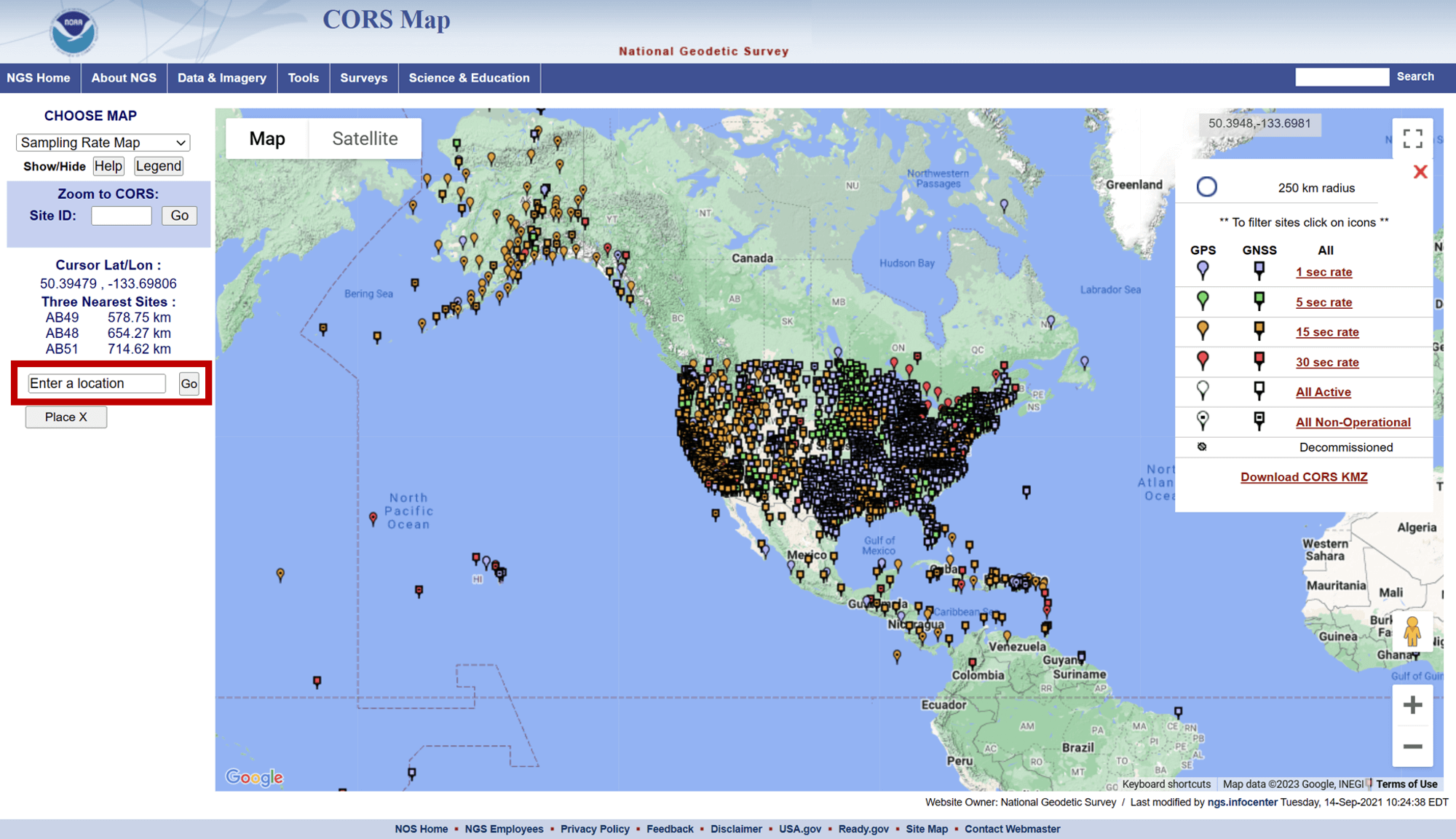
- Vaya al sitio web de la NCN y seleccione Mapa de la NCN en la página web.
- Ingrese la dirección del vuelo del dron en el cuadro de búsqueda de la izquierda y seleccione “Buscar”:
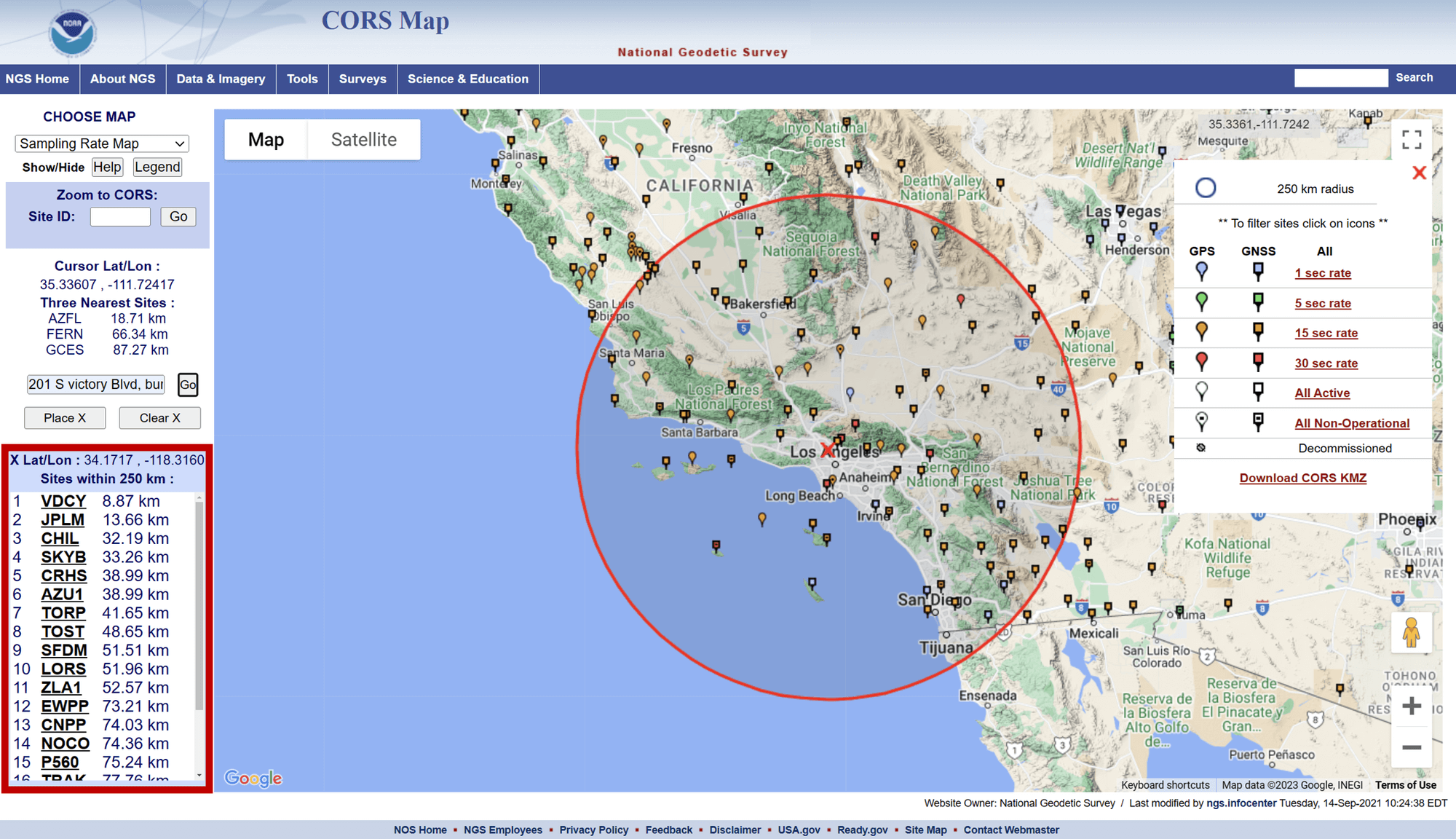
3. Seleccione un emplazamiento con la línea base más corta posible (la línea base se refiere a la distancia entre la estación de referencia del GNSS y el dron). Una distancia de línea base más corta generalmente da lugar a resultados de PPK más precisos, ya que se reducen los posibles errores debidos a las condiciones atmosféricas y otros factores ambientales. Anote el nombre del emplazamiento. La distancia de línea base entre el emplazamiento del CORS y el dron puede afectar la calidad de los datos de referencia utilizados para el proceso de PPK. Una distancia de línea base más larga puede dar lugar a más errores debido a factores atmosféricos y otros factores ambientales, lo que puede llevar a un resultado de PPK menos preciso. Por lo tanto, se recomienda mantener la distancia de línea base lo más corta posible sin dejar de cubrir la zona cartografiada. No se recomienda utilizar emplazamientos con una línea base superior a 32 kilómetros.
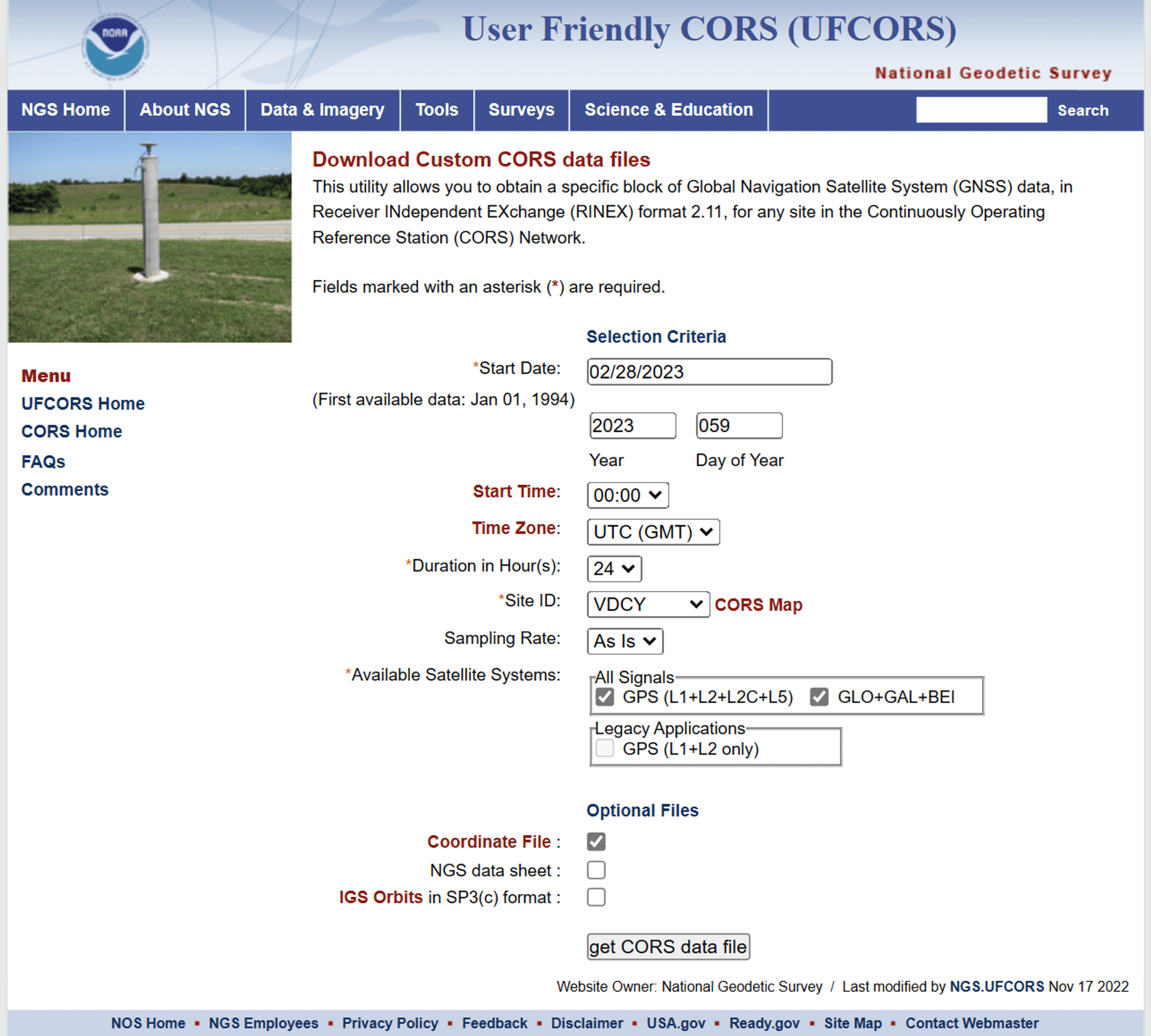
4. Vaya al sitio web de UFCORS y seleccione el intervalo de fechas de los datos que desea recuperar. Seleccione “Obtener archivo de datos del CORS”. Los datos se descargarán como un archivo comprimido (por ejemplo, .zip). Es importante asegurarse de que los datos del CORS se recopilen al mismo tiempo que los datos de imagen del dron para garantizar un procesamiento de la PPK preciso. También se debe evaluar cuidadosamente la calidad de los datos del CORS a fin de garantizar que cumplen las normas de precisión requeridas para el proyecto cartográfico. La planificación y ejecución adecuadas de la misión del dron y la recopilación de datos del CORS son esenciales para garantizar un procesamiento de la PPK preciso y unos resultados cartográficos de alta calidad.
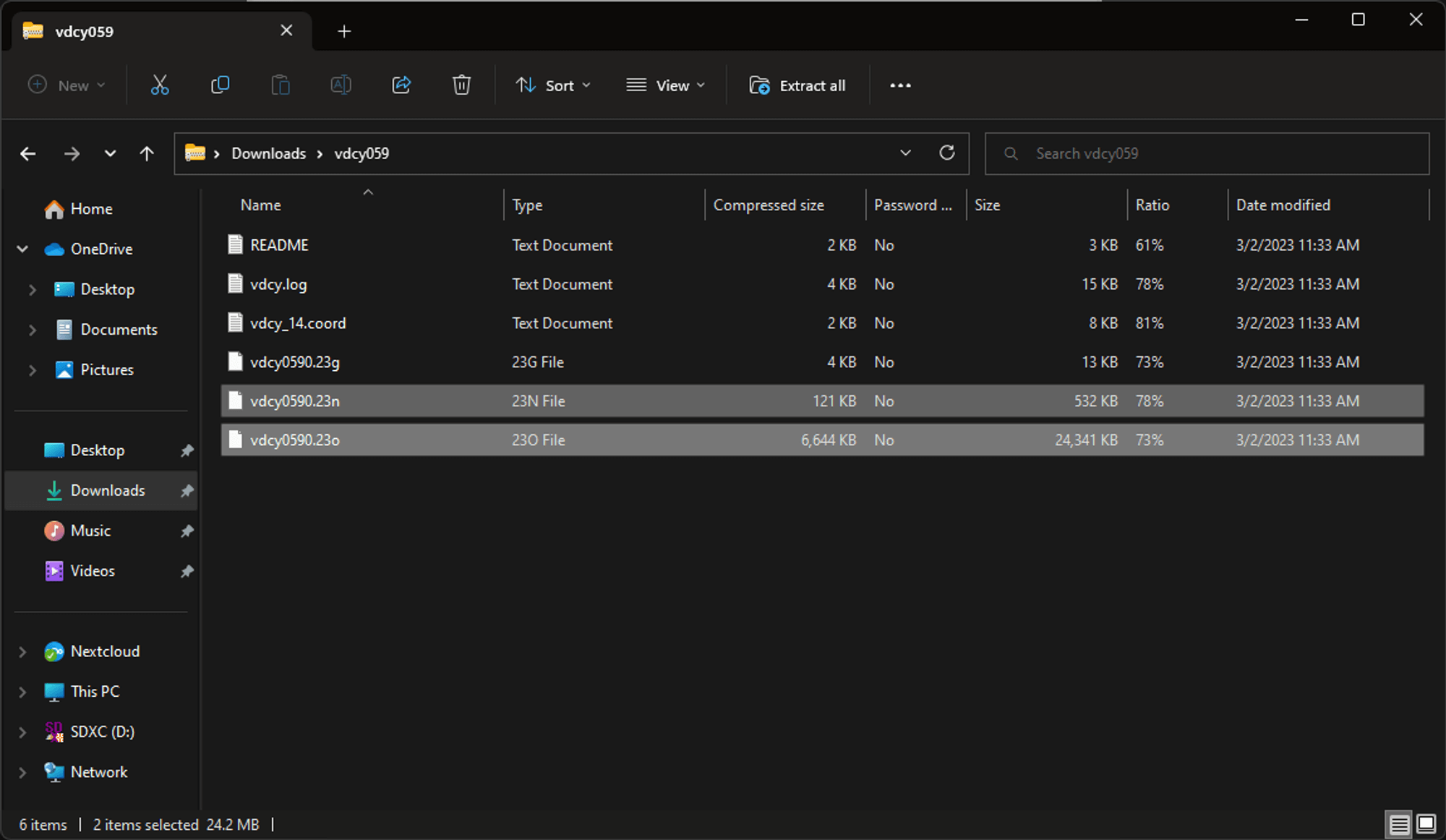
5 .Abra el archivo zip descargado y asegúrese de que contenga los siguientes dos archivos: xxx.xxo (archivo de RINEX base) y xxx.xxn (archivo de navegación).
Si no hay una estación base NGS CORS cerca del lugar de operación del dron, la estación móvil DJI D-RTK 2 es una buena opción para obtener datos de la estación base para el procesamiento de la PPK. Para utilizarla, simplemente configure la estación base sobre un punto conocido con coordenadas WGS84 y altura elipsoidal en metros. Después, ajuste la ubicación de la estación base según las coordenadas tridimensionales del punto conocido en la aplicación Pilot 2.
Asegúrese de instalar la D-RTK 2 en el lugar de operación primero y espere unos minutos antes y después del vuelo para cubrir toda su duración. Asimismo, evite mover o inclinar la estación base D-RTK 2 durante el vuelo del dron, ya que podría interrumpir la grabación de datos debido a los cambios de orientación. Una vez finalizado el vuelo, conecte la estación base a una computadora mediante un cable USB-C y exporte los archivos de la RTCM (Comisión Técnica de Radiocomunicaciones Marítimas) en formato .dat grabados tras el vuelo. Con la estación móvil DJI D-RTK 2, no necesita equipo adicional ni pagar tarifas de suscripción que podrían requerirse para la comunicación en tiempo real. Esto hace que el proceso de PPK sea más económico y ofrece mayor flexibilidad para la recopilación de datos, especialmente en zonas con cobertura celular limitada o inexistente.
Sincronización de datos y procesamiento de la PPK
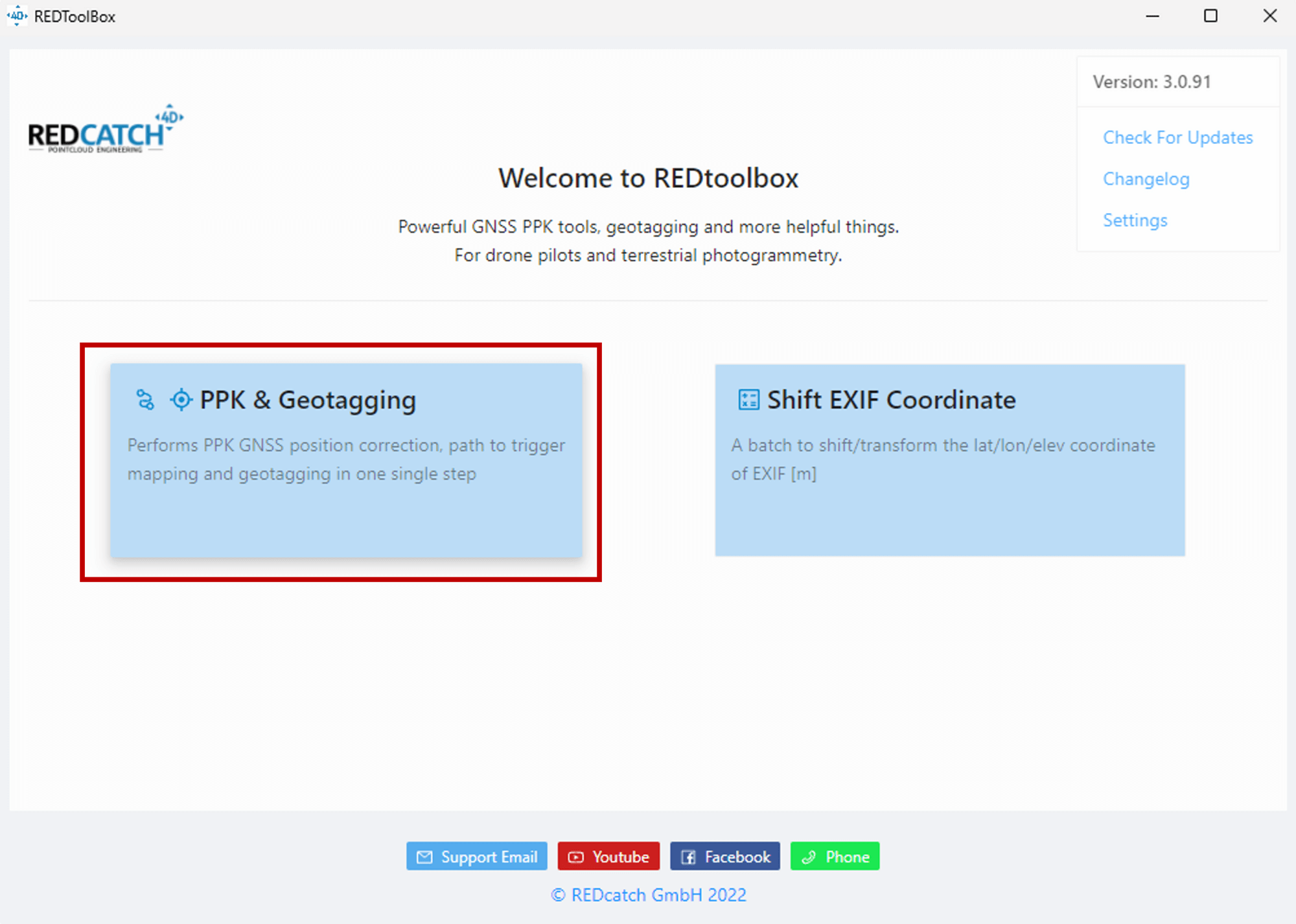
En esta sección se proporciona un proceso paso a paso para aplicar los datos del dron con archivos del GNSS del vehículo explorador recopilados de NGS CORS, estaciones base de terceros o la estación móvil DJI D-RTK 2 para iniciar el proceso de PPK. Utilizaremos RedCatch REDToolBox como ejemplo:- Para empezar, abra RedCatch REDToolBox y seleccione la opción “PPK y georreferenciación”.
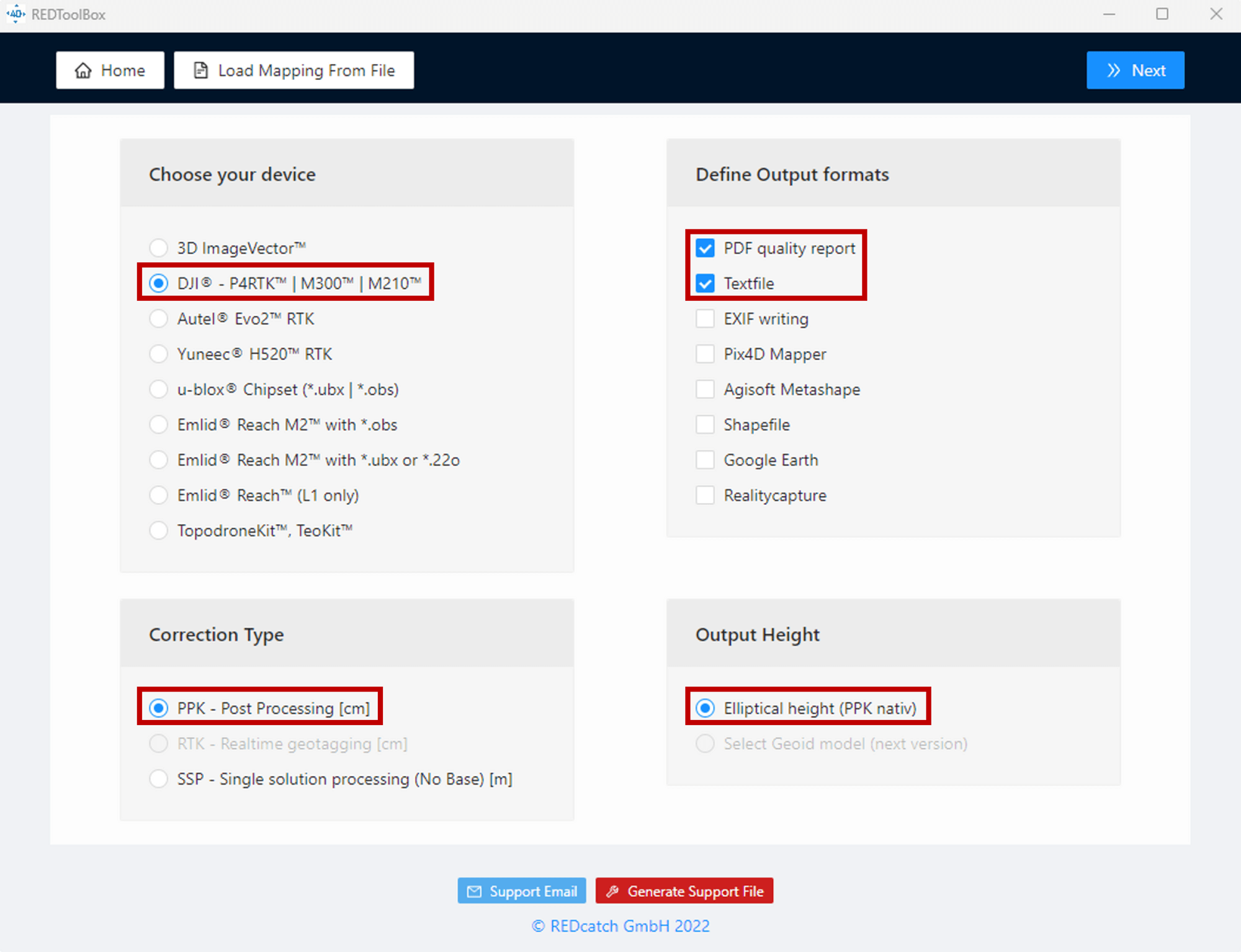
- Al seleccionar esta opción, se le pedirá que elija “DJI” como dispositivo e “Informe de calidad en PDF”; luego, elija “Archivo de texto” como formato de salida. Después, elija la opción “PPK” como tipo de corrección y “Altura elipsoidal (PPK nativa)” como altura de salida. Una vez hechas estas selecciones, haga clic en “Siguiente”.
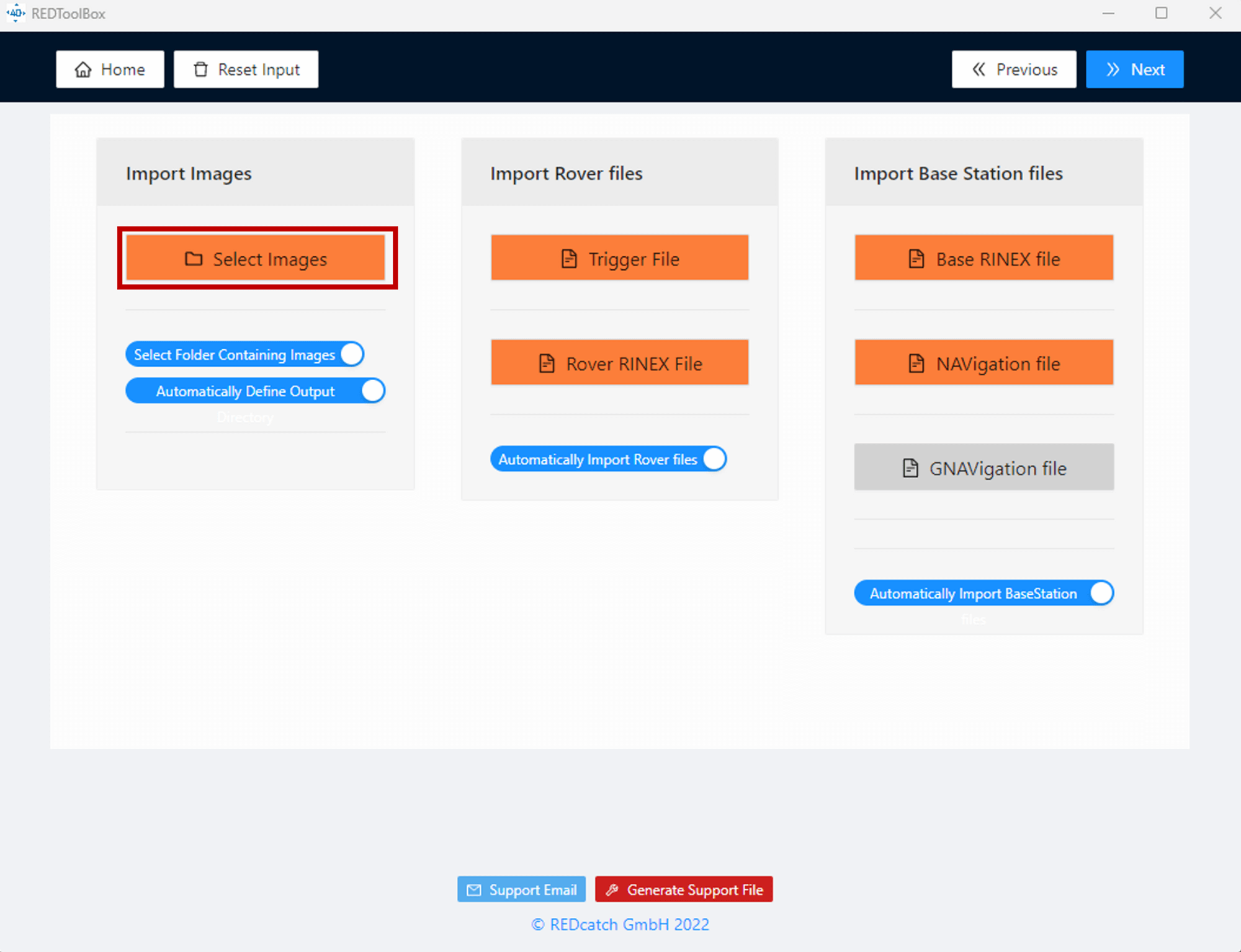
- Para importar imágenes, vaya a la sección “Importar imágenes” y seleccione “Seleccionar imágenes” para definir el directorio de las imágenes sin procesar. Esto garantizará que las imágenes se importen correctamente y puedan utilizarse en el proceso de PPK.
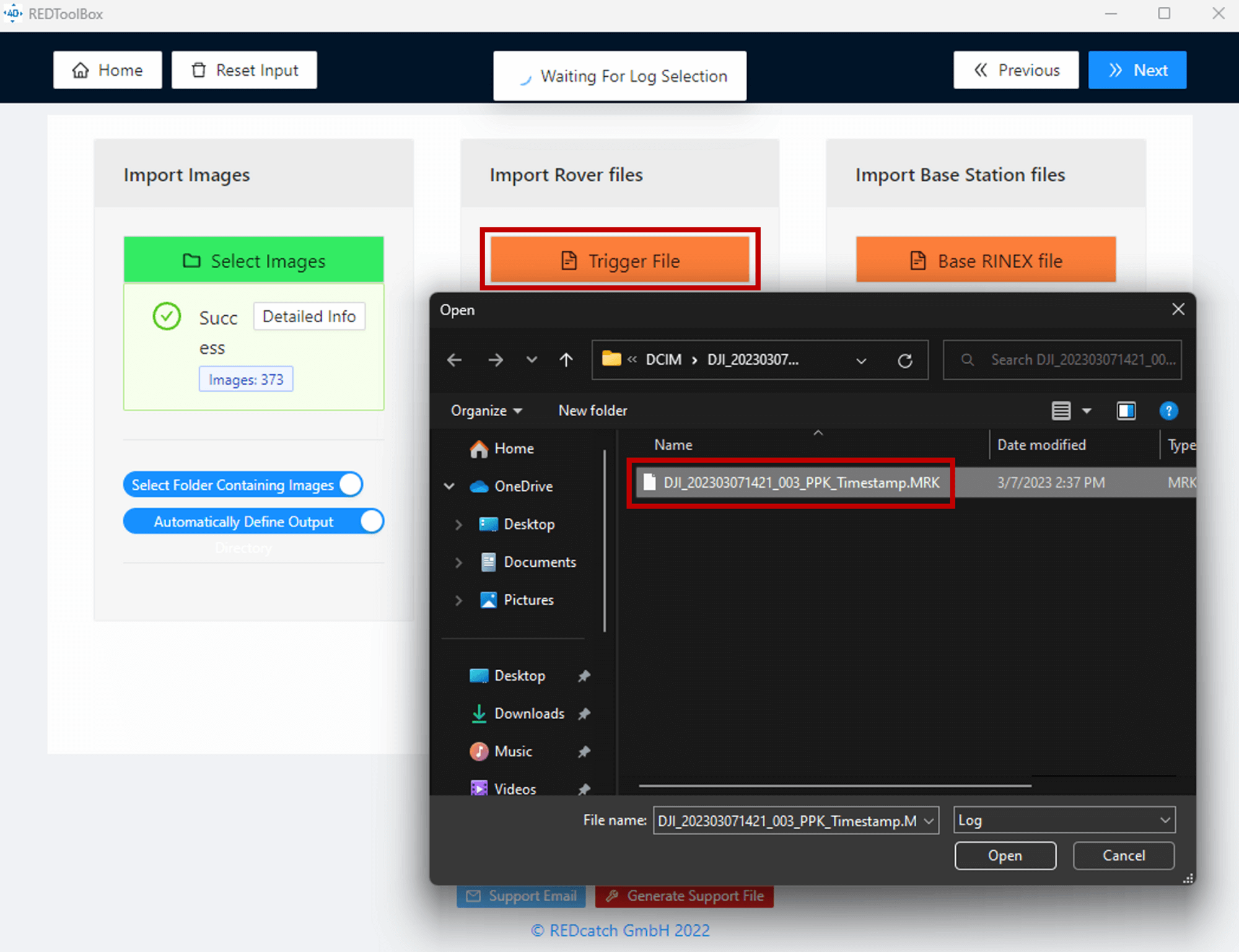
- Luego, vaya a la sección “Importar archivos del vehículo explorador” y seleccione la opción “Archivo de captura”. Aquí, podrá importar el archivo MRK con el nombre “XXX_Timestamp.MRK” en la carpeta de imágenes sin procesar. Este archivo contendrá información crucial sobre las marcas de tiempo de las imágenes que se utilizarán en el proceso de PPK.
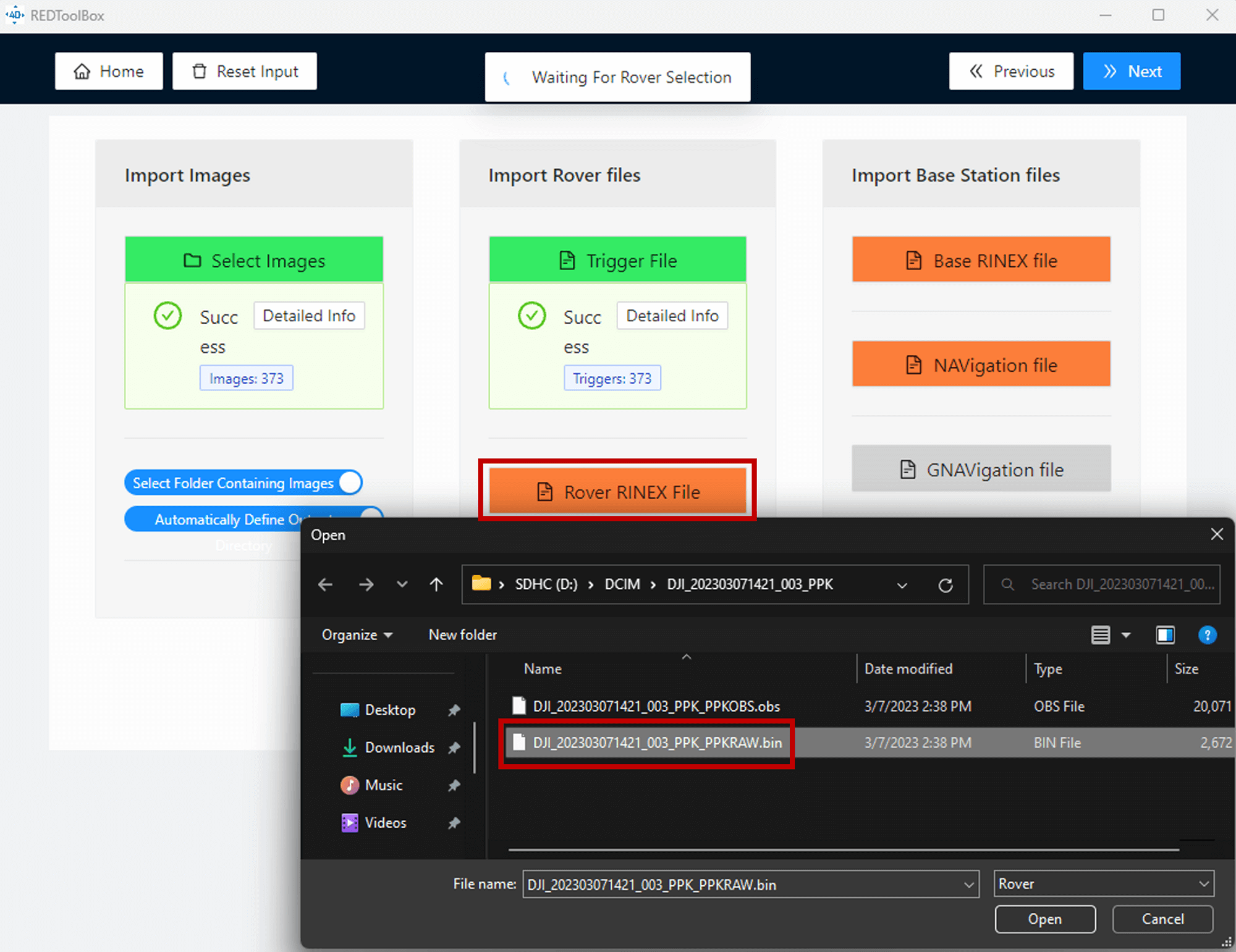
- Tras importar el archivo MRK, tendrá que seleccionar de nuevo la opción “Archivo de RINEX del vehículo explorador” e importar el archivo de RINEX con el nombre “XXX_PPKRAW.bin” en la carpeta de imágenes sin procesar. Asegúrese de seleccionar el archivo correcto, ya que será fundamental para el éxito del proceso de PPK.
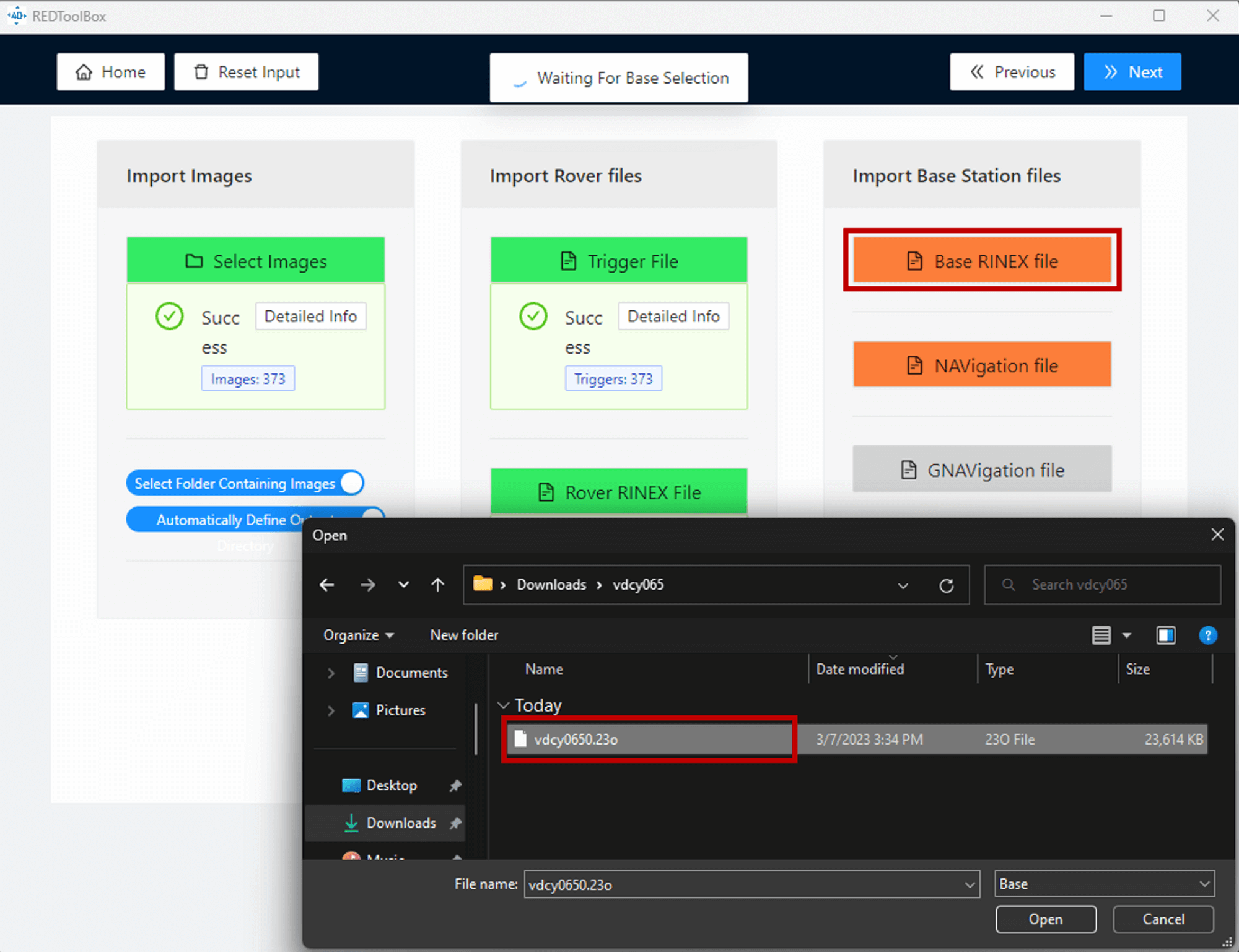
- En la sección “Importar archivos de la estación base”, elija “Archivo de RINEX base” e importe el archivo de RINEX con el nombre “XXX.xxo” desde la carpeta de datos satelitales sin procesar que descargó del sitio de UFCORS. Si está utilizando la estación móvil DJI D-RTK 2 para el procesamiento de la PPK, seleccione e importe el archivo de la RTCM con formato .dat en esta opción. Si necesita combinar varios archivos .dat de la RTCM en un único archivo, utilice la siguiente herramienta y ejecútela en el mismo directorio que los archivos de la RTCM múltiples: merge_bin.bat
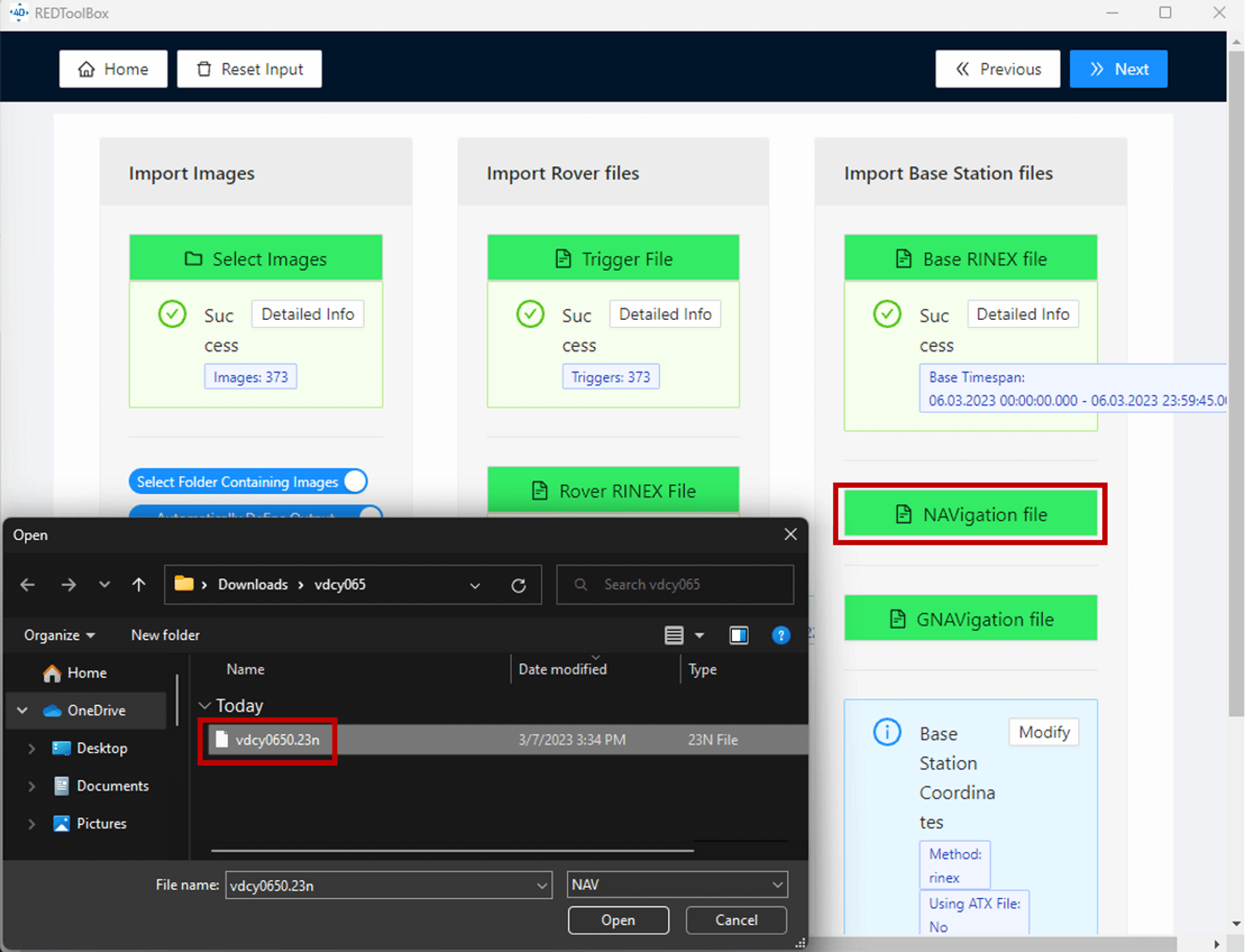
- Una vez seleccionado el archivo XXX.xxo de la carpeta de datos satelitales sin procesar, los archivos de NAVigation y GNAVigation deberían importarse automáticamente. Si no los encuentra, estos dos archivos se encuentran dentro de la carpeta de datos satelitales sin procesar descargada del sitio de UFCORS.
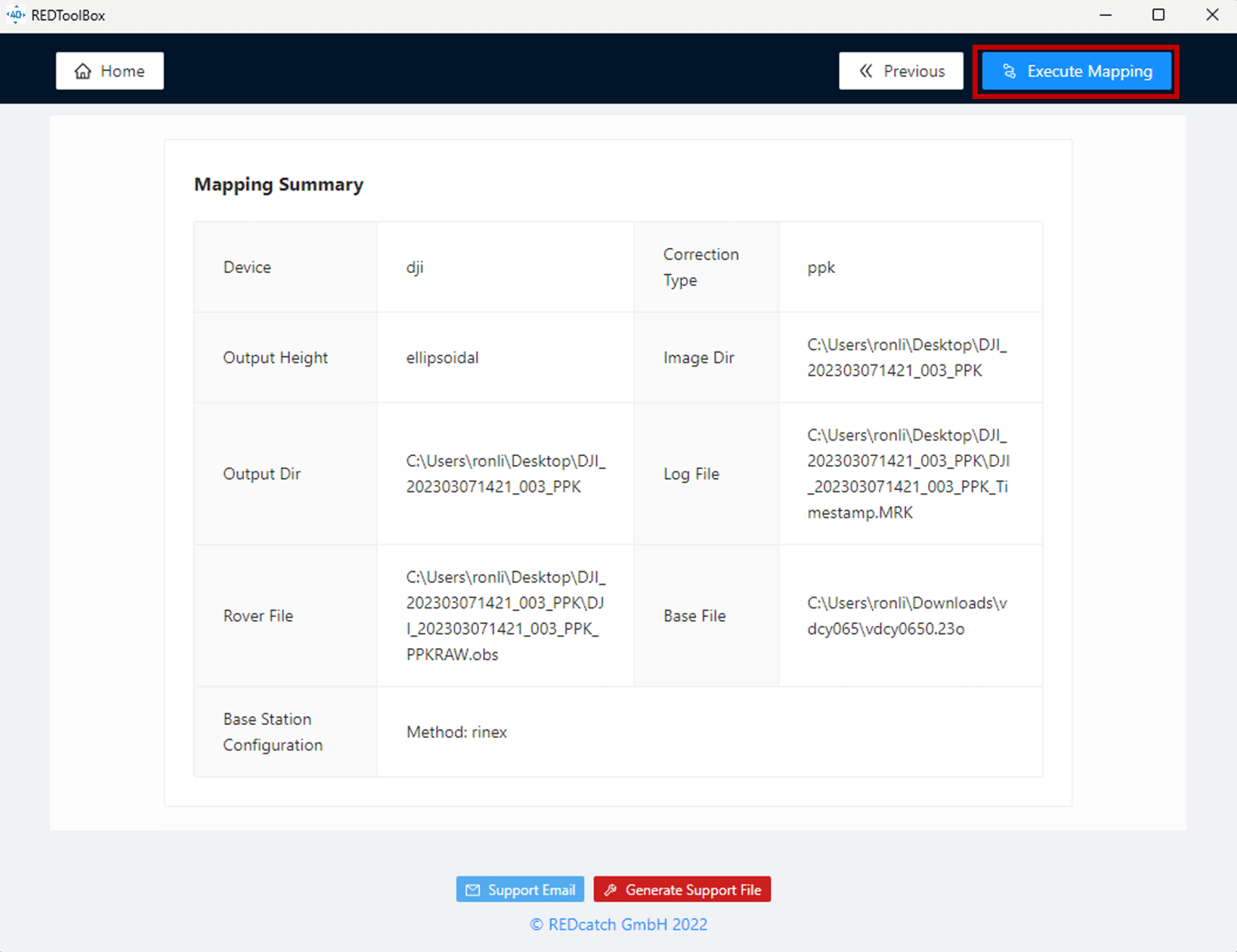
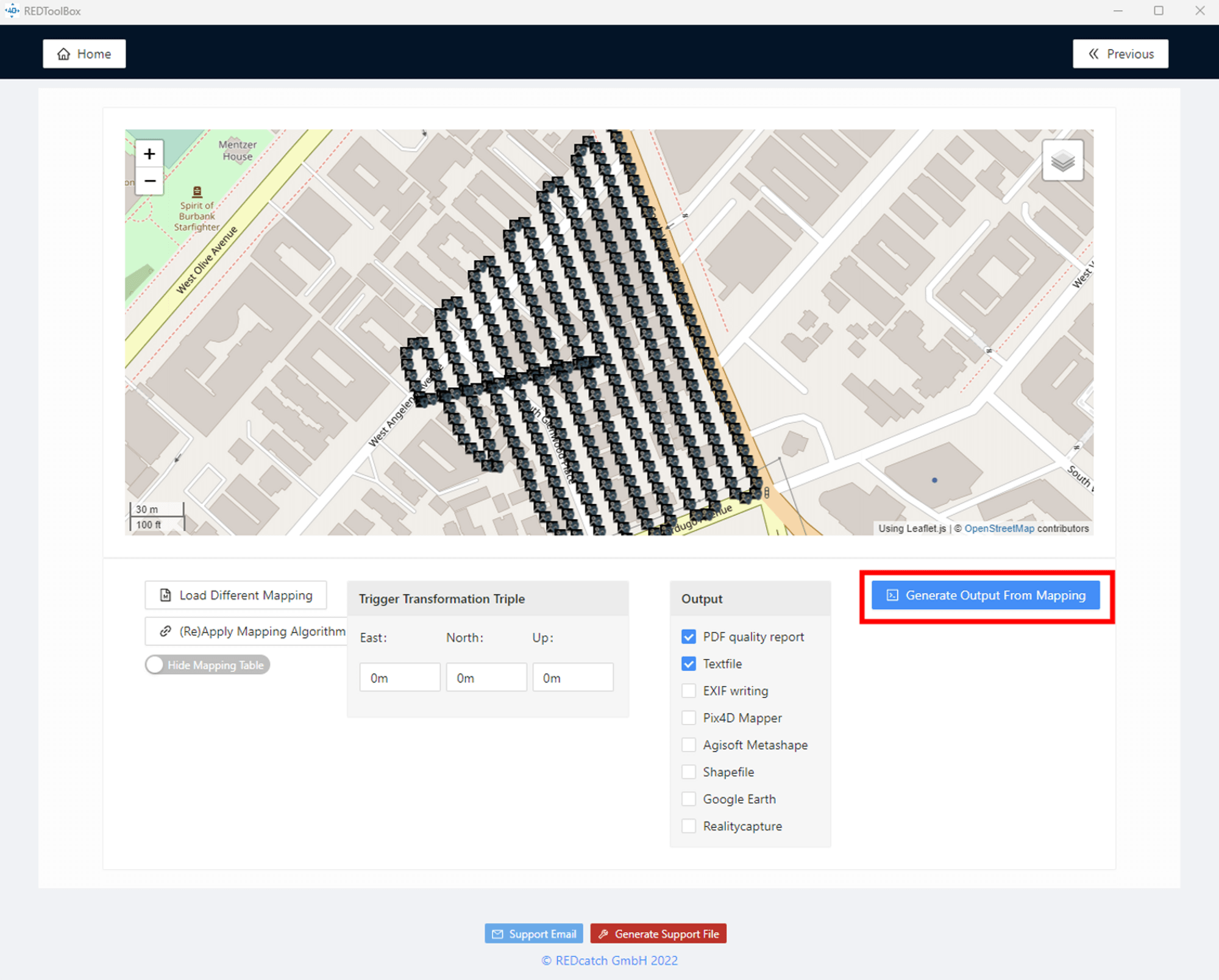
- Por último, revise el resumen de cartografía y seleccione “Ejecutar cartografía” para iniciar el proceso de PPK.
- Una vez finalizado el proceso, marque las casillas “Informe de calidad en PDF” y “Archivo de texto”, y, a continuación, seleccione la opción “Generar resultados de cartografía”.
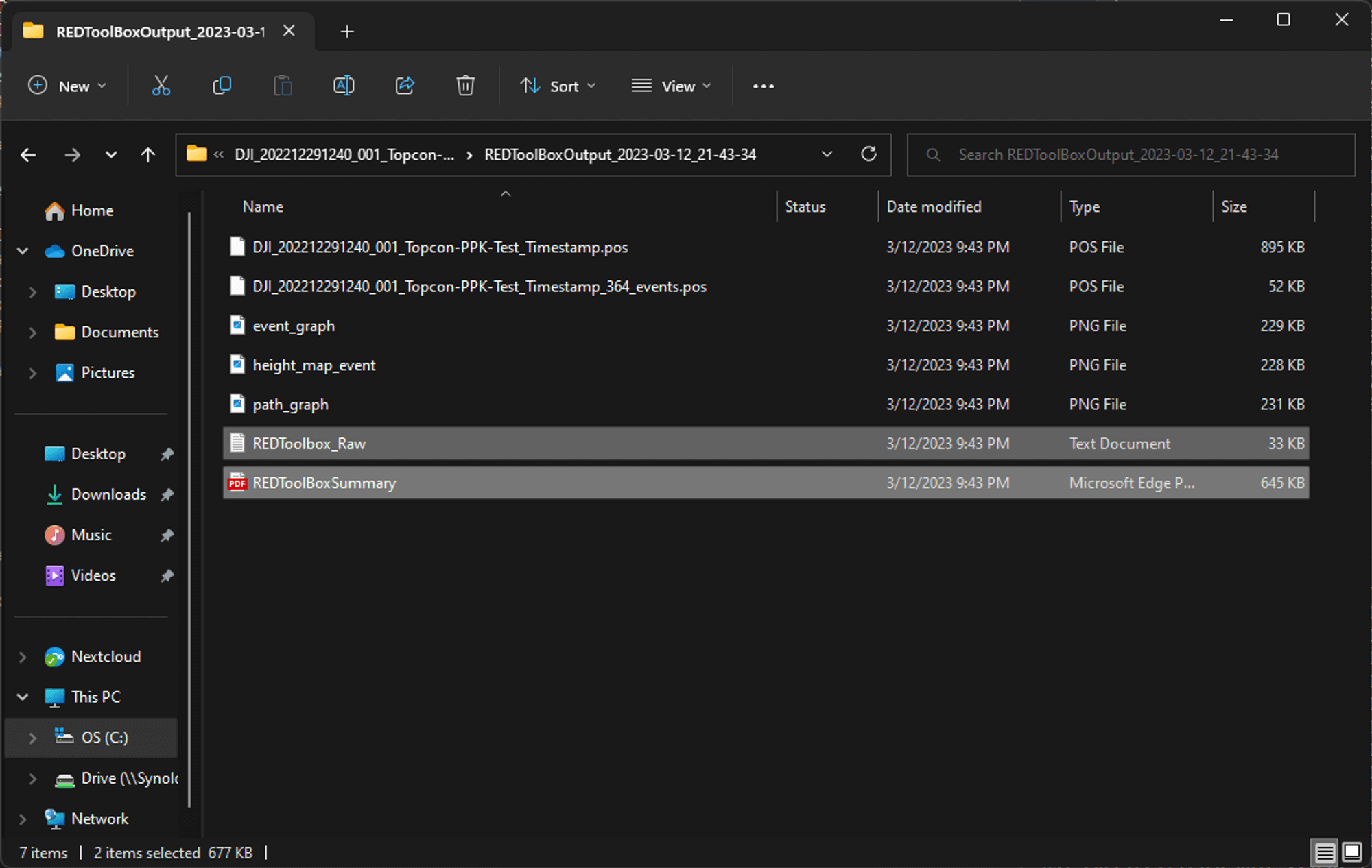
- Para asegurarse de que se exporten tanto los datos del POS corregidos (REDToolbox_Raw.txt) como el informe resumido (REDToolBoxSummary.pdf), abra la carpeta de salida. Más adelante, utilizaremos el primer archivo de marcas de tiempo con los datos del POS de imagen corregidos para el procesamiento de fotogrametría.
Sobrescritura de datos del POS
Los datos del POS (sistema de posición y orientación) de imágenes de drones se refieren a la información sobre la ubicación, altitud y trayectoria de un dron al capturar imágenes. Estos datos se obtienen normalmente mediante GPS y otros sensores a bordo del dron, y se utilizan para georreferenciar con precisión las imágenes y crear un modelo o mapa en 3D de la zona estudiada mediante técnicas de fotogrametría.
En el proceso de fotogrametría, los datos del POS de la imagen del dron se utilizan en el proceso de aerotriangulación para determinar con precisión la posición y orientación de cada imagen en el espacio tridimensional. El proceso de aerotriangulación consiste en calcular las posiciones y orientaciones relativas de las imágenes a partir de sus solapamientos y las características de imagen correspondientes. Los datos del POS de la imagen del dron se utilizan para calcular la orientación de cada imagen en el espacio tridimensional, y esta información se utiliza para generar una nube de puntos dispersa que representa la zona estudiada.
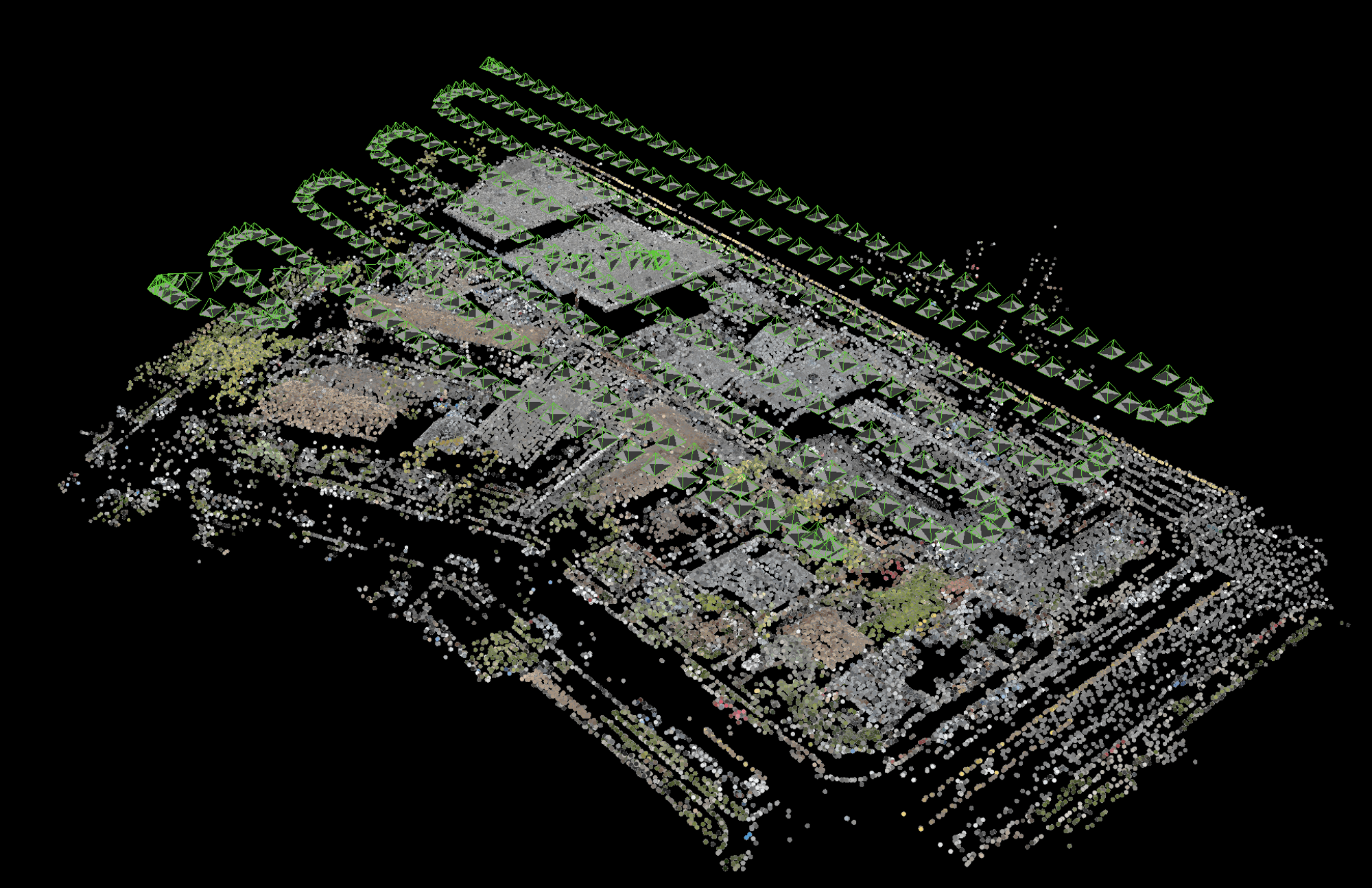 Modelo de aerotriangulación generado a partir del POS de la imagen
Modelo de aerotriangulación generado a partir del POS de la imagen
Si los datos del POS de las imágenes capturadas por el dron no son precisos, el resultado del proceso de fotogrametría también será menos preciso. Cualquier error en los datos del POS de la imagen del dron puede provocar errores en el proceso de aerotriangulación, lo que causará errores en el proceso de ajuste del paquete y, en última instancia, dará lugar a un resultado menos preciso.
La precisión de los datos del POS de la imagen del dron repercute en la precisión global del resultado durante el proceso de PPK. Durante el proceso de PPK, se corrigen los datos del POS de las imágenes del dron para eliminar los errores provocados por el desplazamiento o ruido del GPS, así como otros errores derivados de los sensores. A continuación, los datos del POS corregidos por la PPK resultantes se utilizan para generar una densa nube de puntos que representa la zona topografiada y que puede utilizarse para crear modelos o mapas en 3D. Por lo tanto, es importante asegurarse de que los datos del POS de la imagen del dron estén correctamente definidos en el software del proceso fotogramétrico.
Utilizaremos el software DJI Terra como ejemplo para aplicar y sobrescribir los datos del POS de la imagen. Siga los pasos que se indican a continuación o mire el video para aplicar y sobrescribir los datos del POS de la imagen corregida por PPK en el software Terra:
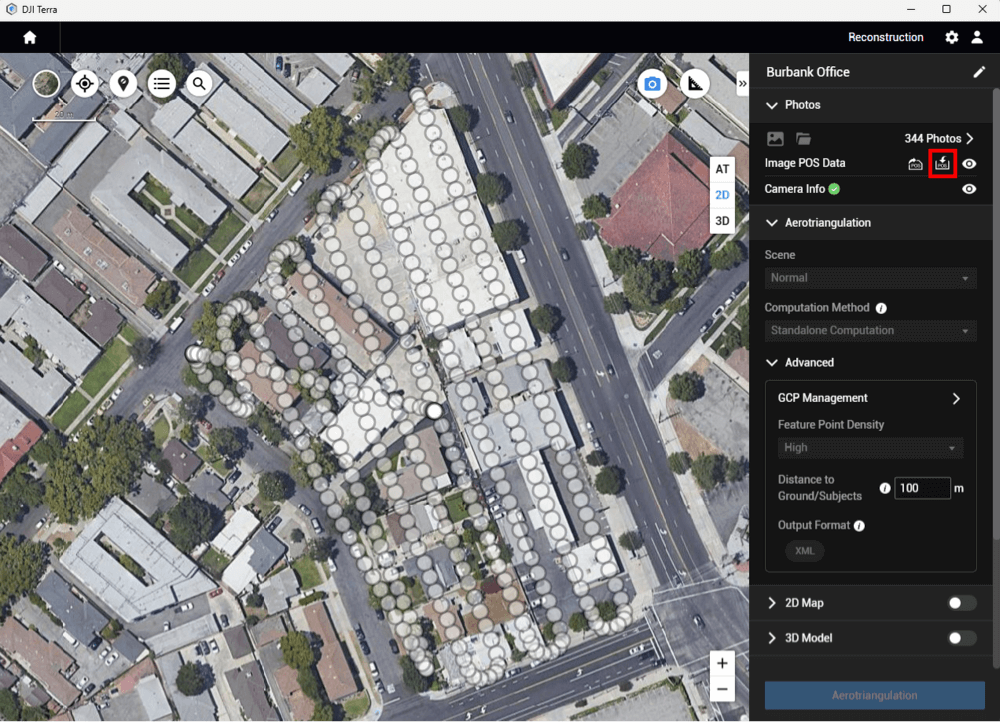
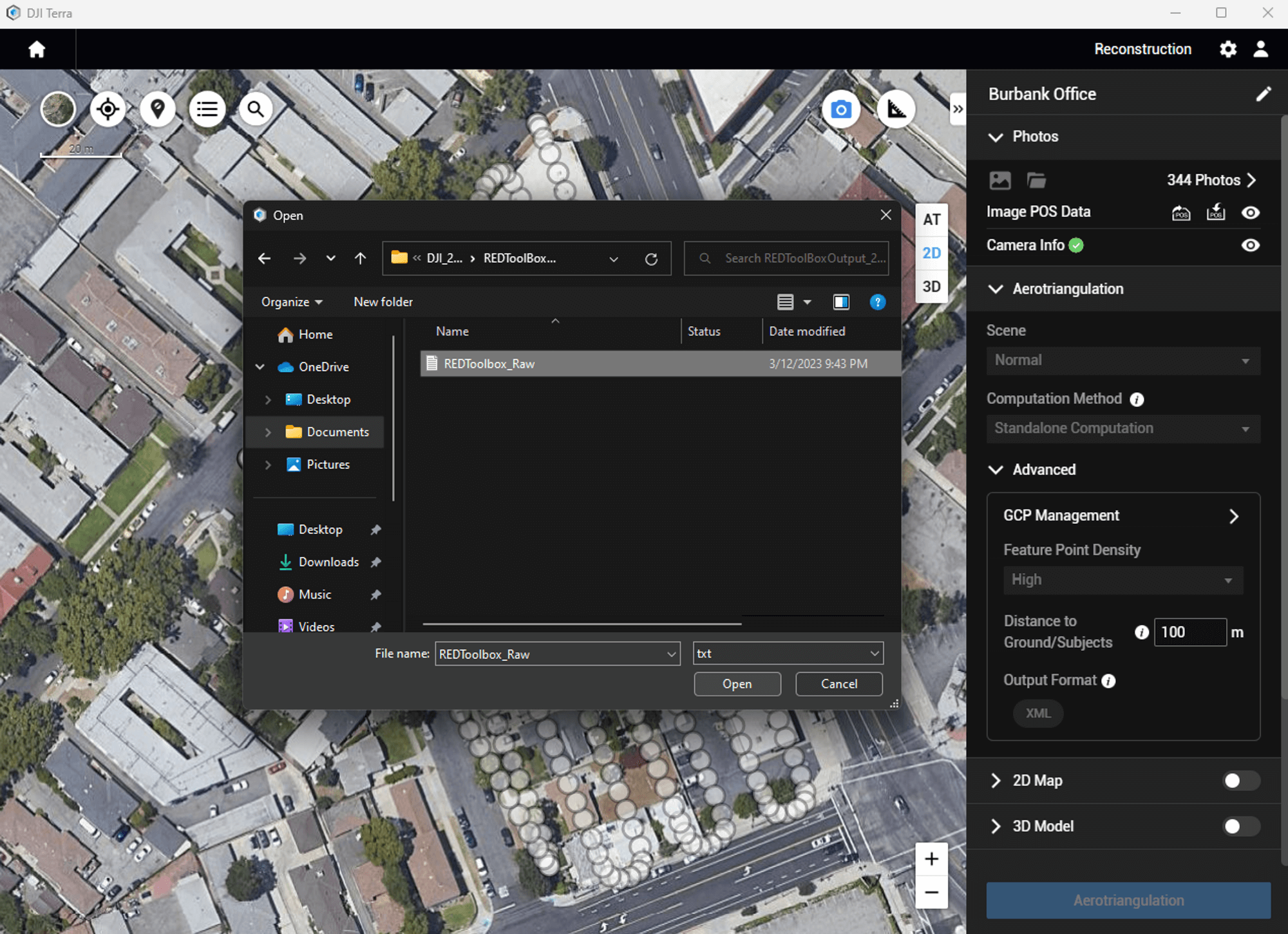
- En DJI Terra, vaya a la pestaña “Reconstrucción”, seleccione “Nueva misión” y, luego, seleccione “Luz visible” para crear una nueva misión de reconstrucción de fotogrametría. Después de importar todas las fotos, seleccione el icono de opción “Importar datos del POS” como se muestra a continuación.
- Asegúrese de incluir el archivo del POS procesado en formato de texto de la sección anterior.
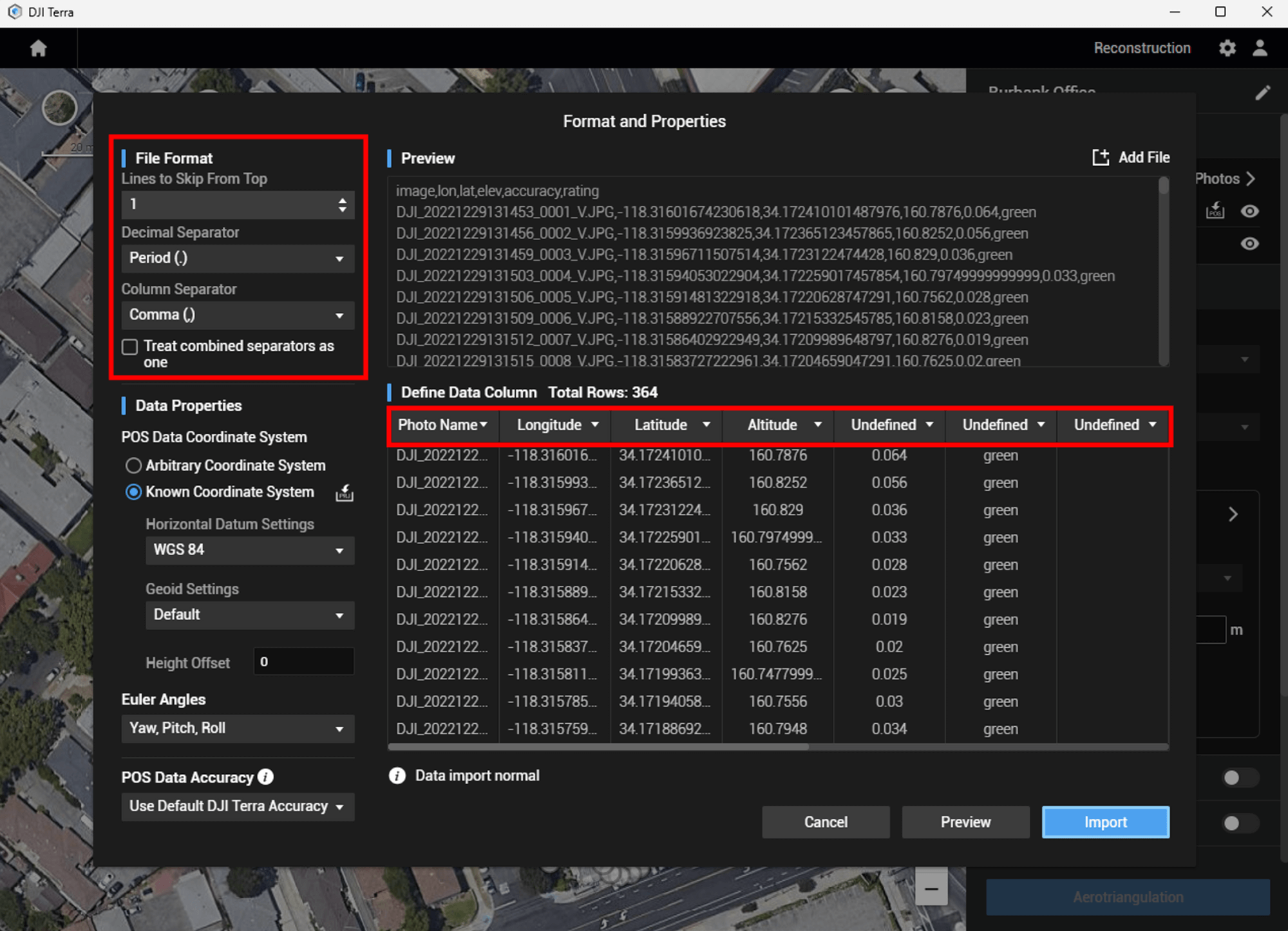
- Tras importar los datos del POS de la imagen, debería aparecer automáticamente la ventana “Formato y propiedades”. En esta ventana, ajuste la columna de datos y defina las propiedades de la columna en la sección “Definir columna de datos”. Asegúrese de que los datos del POS de la primera imagen estén en la primera fila de la tabla y utilice las herramientas en la sección “Formato de archivo” para definir los separadores de datos y la primera línea de datos.
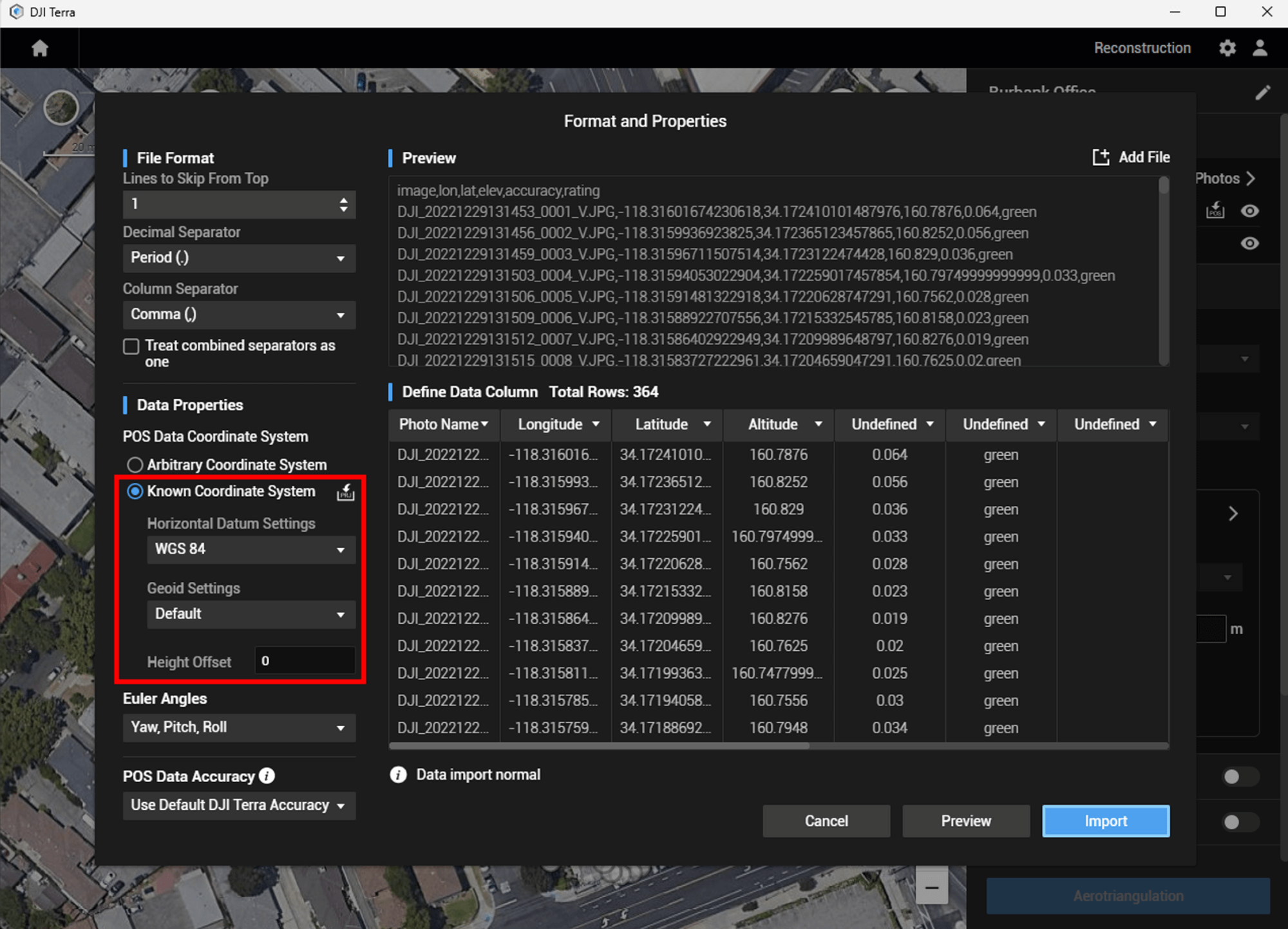
- Para continuar, seleccione la opción “Sistema de coordenadas conocido” en el sistema de coordenadas de los datos del POS. Después, seleccione las coordenadas horizontales y verticales correspondientes para los datos del POS de las imágenes procesadas por PPK que importó. Es esencial elegir las coordenadas correctas tanto en el sistema horizontal como en el vertical para evitar desplazamientos en los resultados. Si no está seguro del sistema de coordenadas que debe elegir, puede encontrar el sistema de coordenadas de los datos del POS procesados por PPK en los ajustes del software de PPK o en el informe de calidad del proceso de datos de PPK. Normalmente, el sistema horizontal se establece en WGS84 (EPSG:4326), y el sistema vertical se establece en altura elipsoidal (en metros, que puede establecerse como “Predeterminado” en DJI Terra). Cuando haya terminado de definir los nuevos datos del POS, seleccione “Importar”.
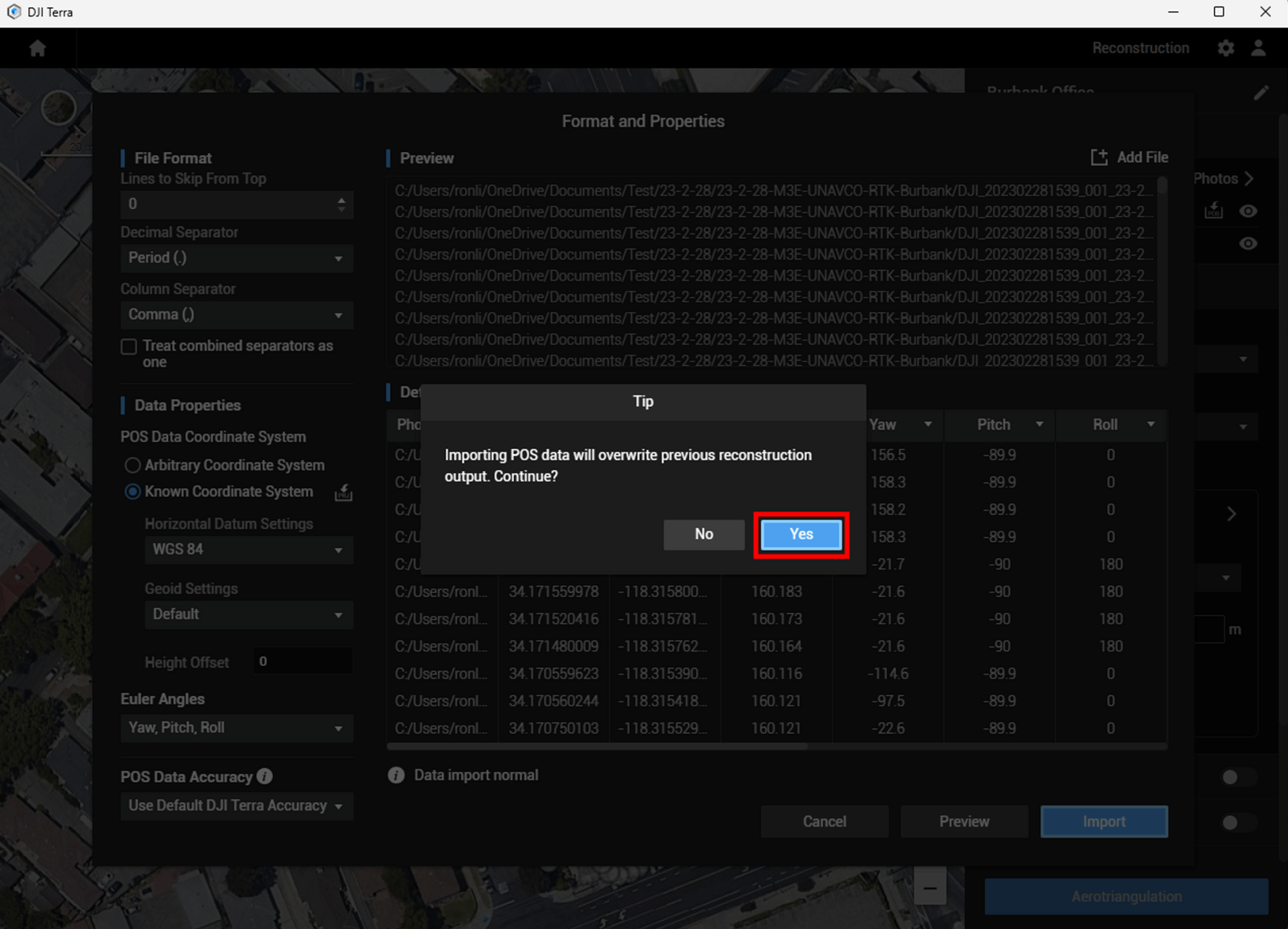
- Para cambiar los datos del POS antiguos incrustados en las fotos por los datos del POS corregidos por PPK del archivo de texto, seleccione “Sí” para confirmar la acción en DJI Terra. Los datos del POS se han sobrescrito correctamente.
Flujo de trabajo PPK con datos LiDAR
-
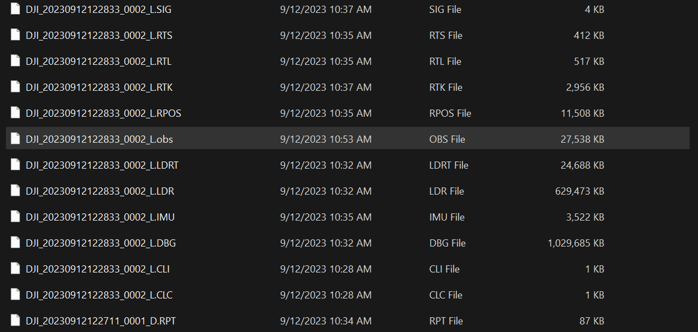
Para procesar los datos DJI LiDAR utilizando el método PPK, asegúrate de preparar primero el archivo de referencia de la estación base. DJI LiDAR admite los siguientes formatos de archivo de estación base y la versión correspondiente:
Formato Version Message Type El nombre y el sufijo del archivo deben cambiarse a: RINEX V2.1.x / DJI_YYYYMMDDHHMM_XXX.obsRTCM V3.0
V3.2
V3.0: 1003, 1004, 1012, 1014 V3.2: MSM4, MSM5, MSM6, MSM7 DJI_YYYYMMDDHHMM_XXX.rtcm OEM OEM4
OEM6
RANGEDJI_YYYYMMDDHHMM_XXX.oemUBX / RAWX DJI_YYYYMMDDHHMM_XXX.ubx Se recomienda que la línea de base, o distancia entre la estación base utilizada para registrar el PPK y la aeronave, esté dentro de los 10 km. el archivo de la estación base utilizado para el proceso PPK debe contener toda la duración del vuelo de escaneo LiDAR.
-
Siga la tabla anterior para renombrar el archivo de referencia de la estación base. Es importante renombrar correctamente tanto el nombre de archivo como el sufijo de extensión de archivo de los datos de referencia de la estación base. El nombre del archivo de referencia de la estación base debe ser idéntico y coincidir con otros archivos LiDAR sin procesar. Para el archivo RINEX, recuerde cambiar la extensión del archivo de .YYO a .obs.
-
Asegúrate de que el archivo de referencia de la estación base renombrado se encuentra en el mismo directorio que la carpeta de datos LiDAR sin procesar. A continuación, importa la carpeta de datos LiDAR sin procesar a DJI Terra e inicia el proceso. DJI Terra leerá automáticamente el archivo de referencia de la estación base e iniciará el proceso PPK con la referencia de la estación base PPK.
-
¡Listo!
El flujo de trabajo de PPK ofrece una solución eficaz y exacta para obtener datos geoespaciales de gran precisión para diversas aplicaciones. Gracias a la combinación del GPS y las técnicas de posprocesamiento, la PPK permite a los usuarios obtener una precisión centimétrica en sus datos, incluso en condiciones ambientales adversas. Al seguir el flujo de trabajo correcto de la PPK y utilizar herramientas avanzadas de software y hardware, los usuarios pueden asegurarse de alcanzar el más alto nivel de precisión y exactitud en sus datos, lo que finalmente conduce a una toma de decisiones más precisa y resultados mejorados.



-1.png?width=300&name=M400%20(1)-1.png)
