La cinematica di post-elaborazione (PPK) è un metodo che utilizza i dati del sistema globale di navigazione satellitare (GNSS) per determinare con precisione la posizione e la traiettoria di un rover/drone. La tecnica PPK comporta la raccolta di dati GNSS raw da un drone, unitamente alle informazioni sulla posizione e la traiettoria delle stazioni di riferimento nelle vicinanze, e l'elaborazione successiva dei dati per migliorare l'accuratezza di tali informazioni.
Vene comunemente utilizzata in applicazioni di rilevamento topografico, mappatura e agricoltura di precisione, per le quali è fondamentale la massima accuratezza del posizionamento. A differenza del posizionamento cinematico in tempo reale (RTK, Real-Time Kinematic), che richiede una connessione wireless in tempo reale alle stazioni di riferimento, l'elaborazione PPK può essere eseguita in un secondo momento, offrendo così una maggiore flessibilità nella raccolta dei dati.
La post-elaborazione dei dati GNSS richiede l'utilizzo di un software specializzato per elaborare i dati raw raccolti dal ricevitore e confrontarli con i dati provenienti dalle stazioni di riferimento vicine per stabilire la posizione precisa del drone in un determinato momento. Questo processo può migliorare l'accuratezza delle informazioni sulla posizione e sulla traiettoria correggendo gli errori introdotti da fattori quali le condizioni atmosferiche e le deviazioni dell'orbita satellitare.
Sebbene sia possibile utilizzare entrambi i sistemi di posizionamento per le applicazioni di mappatura con droni, il metodo PPK presenta alcuni vantaggi rispetto alla tecnica RTK:
|
Pro |
Contro |
|
|
RTK |
Feedback in tempo reale: con il metodo RTK, è possibile ottenere feedback in tempo reale durante la missione, il che semplifica l'identificazione e la risoluzione dei problemi non appena si verificano. Elaborazione rapida dei dati: i dati RTK possono essere elaborati rapidamente, accelerando così i tempi di consegna del prodotto finale. Facilità d'uso: RTK è in genere più facile da utilizzare rispetto al sistema PPK e richiede minori competenze a livello di impostazione e funzionamento |
Minore precisione: la precisione RTK può essere influenzata da ritardi e interruzioni delle comunicazioni che rendono questo sistema meno accurato del PPK. Dipendenza dalla comunicazione: RTK richiede la comunicazione in tempo reale con una stazione di riferimento durante la missione, il che può essere difficile in aree remote o rurali con copertura cellulare limitata o assente quando si utilizza RTK tramite il protocollo NTRIP. Costi più elevati: RTK può essere più costoso del sistema PPK data la necessità di moduli RTK aggiuntivi o di abbonamenti al servizio NTRIP |
|
PPK |
Comunicazione in tempo reale non necessaria: il sistema RTK richiede una comunicazione in tempo reale tra il drone e la stazione a terra per ricevere i dati di correzione dalla stazione di riferimento. Per contro, PPK non richiede una comunicazione in tempo reale, poiché i dati di correzione vengono applicati in un secondo momento durante la post-elaborazione. Maggiore flessibilità: con PPK, il drone può volare e raccogliere i dati, mentre la post-elaborazione può essere effettuata in un secondo momento, offrendo una maggiore flessibilità per la raccolta dei dati, soprattutto in aree con copertura cellulare limitata o assente. Maggiore precisione: sebbene entrambi i sistemi siano in grado di garantire un'elevata precisione, PPK può offrire un'accuratezza ancora maggiore poiché non è soggetto a potenziali ritardi o interruzioni nella comunicazione durante la raccolta dei dati. PPK può inoltre utilizzare più stazioni di riferimento durante la post-elaborazione, migliorando ulteriormente il livello di precisione. Costi ridotti: PPK può risultare meno costoso del sistema RTK perché non necessita di comunicazioni in tempo reale, che possono richiedere apparecchiature aggiuntive e costi di abbonamento. |
Tempo di post-elaborazione più lungo: il sistema PPK prevede una post-elaborazione dei dati, che può richiedere tempo e ritardare la consegna del prodotto finale. Maggiori competenze richieste: per eseguire la post-elaborazione dei dati, il sistema PPK richiede un livello di competenza superiore che non tutti gli utenti potrebbero avere Requisiti di durata minima del volo: per ottenere dati di posizionamento accurati, è necessario acquisire un numero sufficiente di punti dati GNSS durante il volo. Ciò significa che il drone deve volare per un tempo e una distanza sufficienti ad acquisire i punti dati necessari per l'elaborazione PPK. La durata e la distanza richieste dipendono da vari fattori, come il ricevitore GNSS utilizzato, la qualità dei dati della stazione di riferimento e l'ambiente di volo. In genere, si consiglia una durata di volo minima di 10 minuti per acquisire un numero sufficiente di punti dati GNSS per un'elaborazione PPK accurata. Tuttavia, ciò può variare a seconda dei requisiti specifici del progetto di mappatura e della qualità dei dati GNSS raccolti.The selection of PPK or RTK for a mapping project ultimately depends on specific requirements, including flexibility, cost, and mission scale. Although both methods have their advantages and disadvantages, DJI Enterprise RTK drones always record satellite observation data. This ensures that even if an unstable cellular environment interrupts real-time communication during an RTK flight, the user can still retrieve base station data and use the PPK method as backup to output centimeter-level accurate data. |
La scelta del sistema PPK o RTK per un progetto di mappatura dipende, in ultima analisi, da requisiti specifici, tra cui flessibilità, costi e dimensioni della missione. Sebbene entrambi i metodi presentino vantaggi e svantaggi, i droni DJI Enterprise RTK registrano sempre i dati di osservazione satellitare. In questo modo, anche se una rete cellulare instabile interrompe la comunicazione in tempo reale durante un volo RTK, l'utente può comunque recuperare i dati della stazione base e utilizzare il metodo PPK come backup per ottenere dati accurati a livello centimetrico.
Predisposizione dell'hardware e del software PPK
|
Hardware per APR e payload (una delle opzioni previste) |
Matrice 300 RTK + Zenmuse P1 |
|
Software per la pianificazione delle missioni di volo |
App DJI Pilot 2 |
|
Fonte del file Base Receiver Independent Exchange (RINEX) e del file di navigazione |
Stazione base DJI D-RTK 2 |
| Software PPK (una delle opzioni previste) |
Propeller Aero |
| Software di fotogrammetria |
DJI Terra |
Flusso di lavoro generale
L'elaborazione PPK dei dati di immagine acquisiti dai droni può sembrare scoraggiante, ma in realtà è un processo semplice che richiede un'attenta pianificazione ed esecuzione. Il processo prevede diversi passaggi chiave, che verranno illustrati più dettagliatamente nelle istruzioni riportate di seguito.
- Impostazioni e preparativi: prima di iniziare a raccogliere i dati dei droni, è necessario pianificare attentamente la missione. Occorre quindi assicurarsi che la durata del volo sia sufficientemente lunga e che alcune impostazioni siano abilitate nell'app DJI Pilot. Un'attenta pianificazione della missione è fondamentale per assicurarsi che vengano raccolti dati sufficienti a garantire un'accurata elaborazione PPK.
- Raccolta dei dati del drone: una volta pianificata la missione, è il momento di raccogliere i dati di immagine del drone e i dati GNSS corrispondenti acquisiti dal ricevitore del drone durante il volo. I dati GNSS devono includere i dati raw del sistema di navigazione satellitare e le informazioni relative alla data e all'ora. È importante raccogliere il maggior numero possibile di dati per garantire un'elaborazione PPK accurata.
- Raccolta dei dati di riferimento: oltre ai dati dei droni, è necessario raccogliere i dati di riferimento dalle stazioni GNSS vicine, come le stazioni permanenti CORS o altri ricevitori a terra. I dati di riferimento devono includere gli stessi segnali GNSS e le stesse informazioni relative alla data e all'ora dei dati GNSS del drone. Raccogliendo i dati di riferimento, è possibile garantire che i risultati PPK siano il più accurati possibile.
- Allineamento dei dati ed elaborazione PPK: una volta raccolti tutti i dati necessari, occorre allineare i dati di immagine del drone con i dati GNSS corrispondenti in base alle informazioni relative alla data e all'ora. Questa operazione può essere eseguita utilizzando strumenti software specializzati in grado di abbinare le informazioni sulla data e sull'ora tra l'acquisizione dell'immagine e il punto dati GNSS. Dopo aver allineato i dati, è possibile elaborarli utilizzando un software PPK specializzato o dei servizi online. L'elaborazione PPK utilizza i dati GNSS provenienti sia dal ricevitore del drone che dalle stazioni di riferimento per calcolare le informazioni di posizionamento accurate per ciascuna immagine acquisita durante il volo.
- Sovrascrittura dei dati POS. Occorre assicurarsi che i nuovi dati POS siano importati correttamente nel software di fotogrammetria. Questa fase è fondamentale perché la precisione dei modelli fotogrammetrici dipende in larga misura dalla qualità dei dati di input. Pertanto, è necessario controllare più di una volta la compatibilità dei dati POS con il software e assicurarsi che siano sovrascritti correttamente.
Sebbene possa sembrare complessa, l'elaborazione PPK con i dati di immagine acquisiti dal drone è un'operazione necessaria per ottenere risultati di mappatura accurati. Pianificando attentamente la missione, raccogliendo dati sufficienti ed eseguendo controlli di qualità rigorosi, è possibile garantire che i risultati siano il più possibile accurati.
Impostazioni e preparativi
Prima di far volare il drone, è importante configurare correttamente l'app DJI Pilot 2. Ecco alcuni suggerimenti in grado di garantire la buona riuscita del volo:
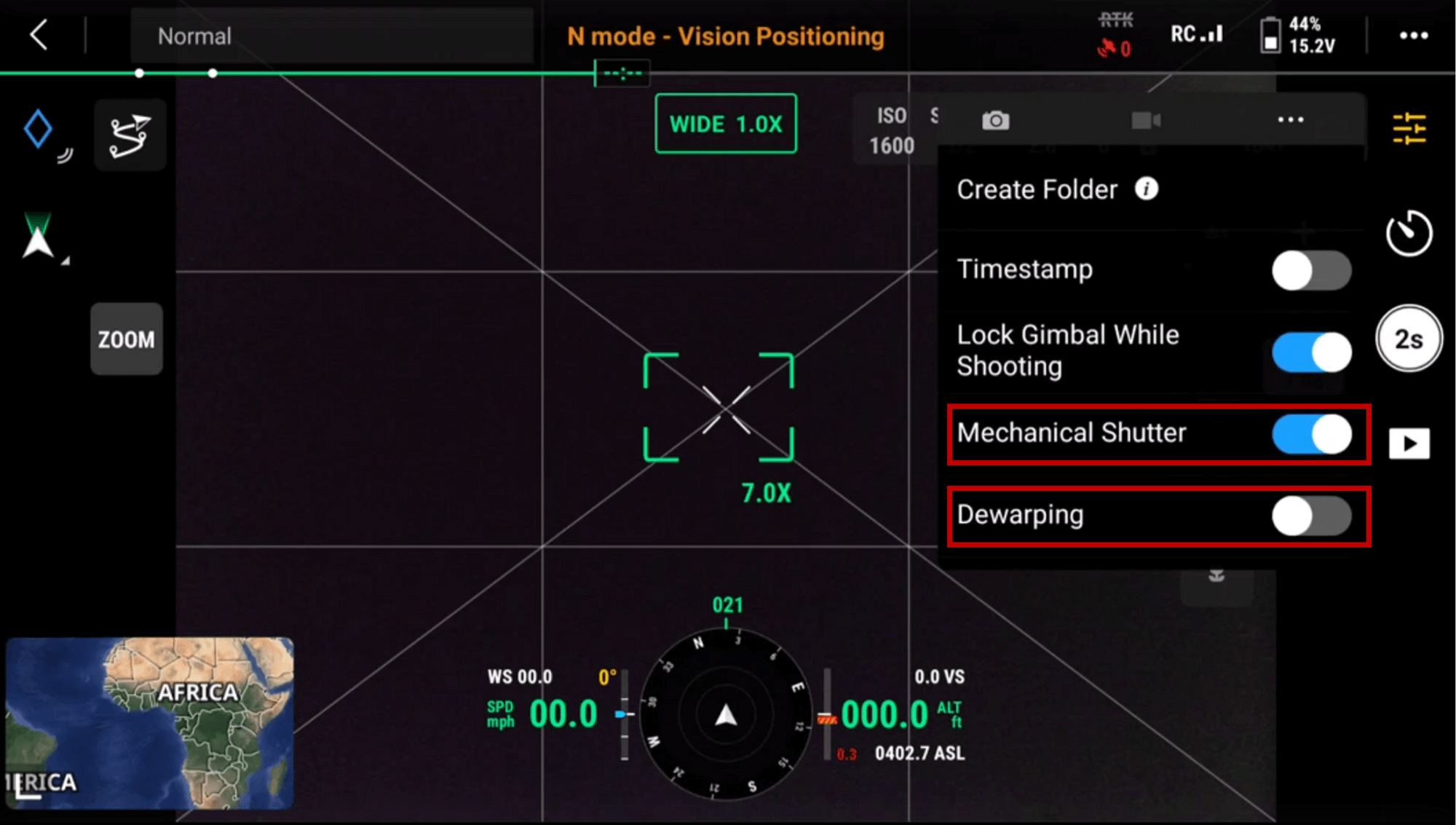
- Abilitare l'opzione "Otturatore meccanico" e disabilitare l'opzione "Correzione distorsione".
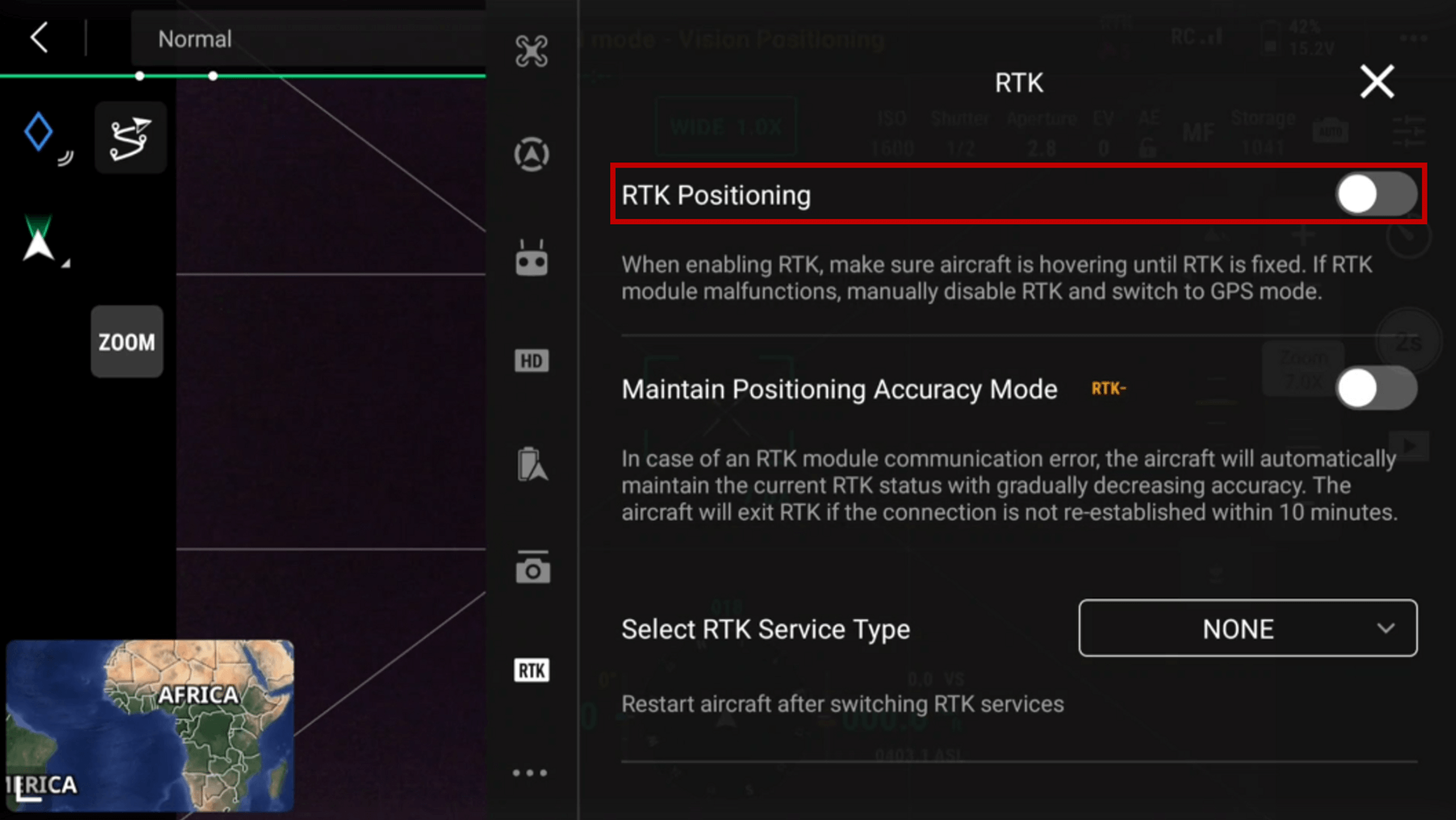
- Assicurarsi che l'opzione RTK sia disattivata nell'app Pilot
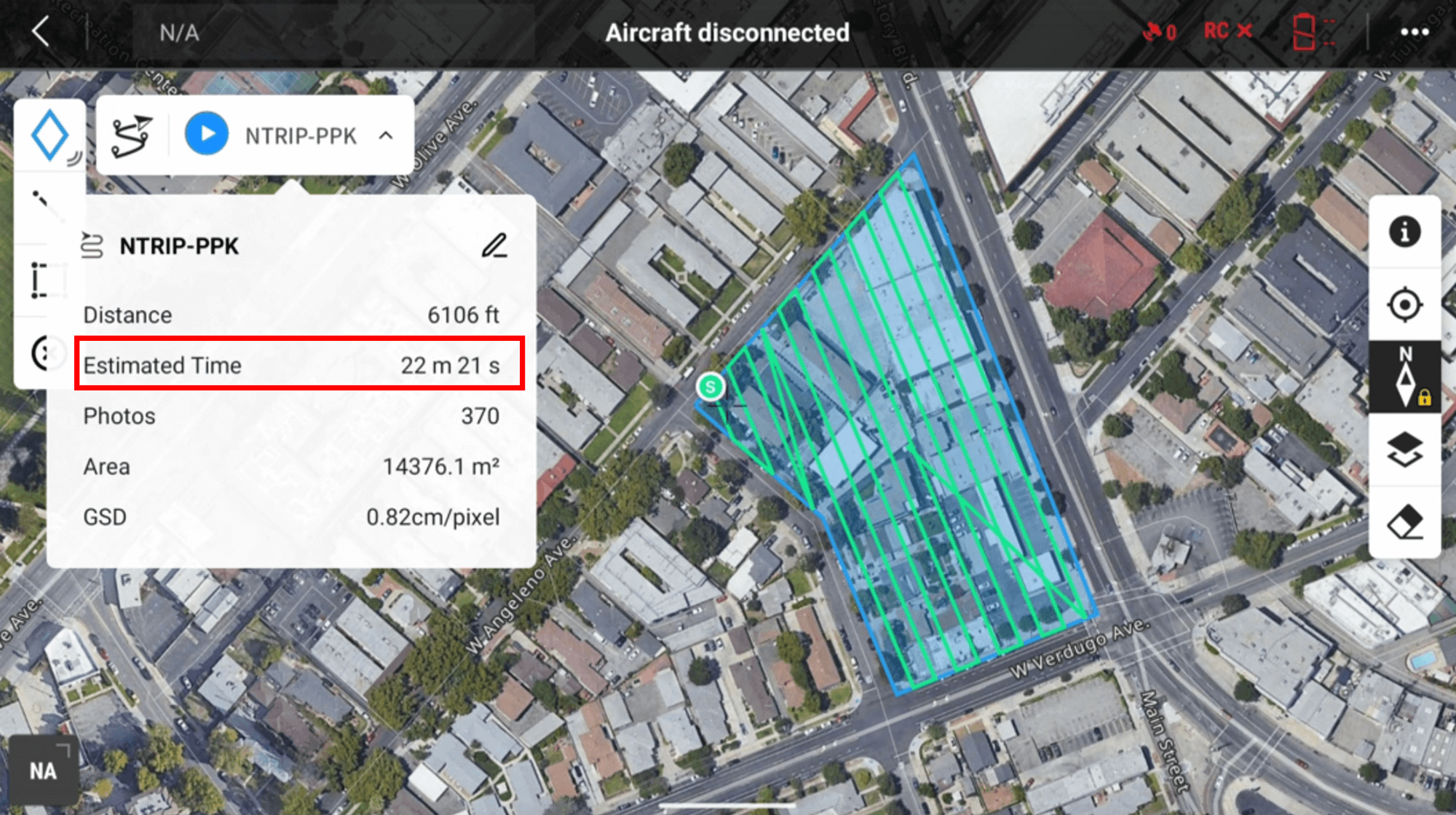
- È importante notare che il sistema PPK prevede una post-elaborazione dei dati, che può richiedere tempo e ritardare la consegna del prodotto finale. Inoltre, per ottenere dati di posizionamento accurati con PPK, è necessario acquisire un numero sufficiente di punti dati GNSS durante il volo. La durata e la distanza richieste dipendono da vari fattori, come il ricevitore GNSS utilizzato, la qualità dei dati della stazione di riferimento e l'ambiente di volo. In genere, si consiglia di volare per almeno 10 minuti per acquisire un numero sufficiente di punti dati GNSS per un'elaborazione PPK accurata. Nell'app Pilot, è possibile controllare il tempo di volo previsto per la missione nella scheda a discesa della panoramica delle missioni.
Raccolta dei dati del drone
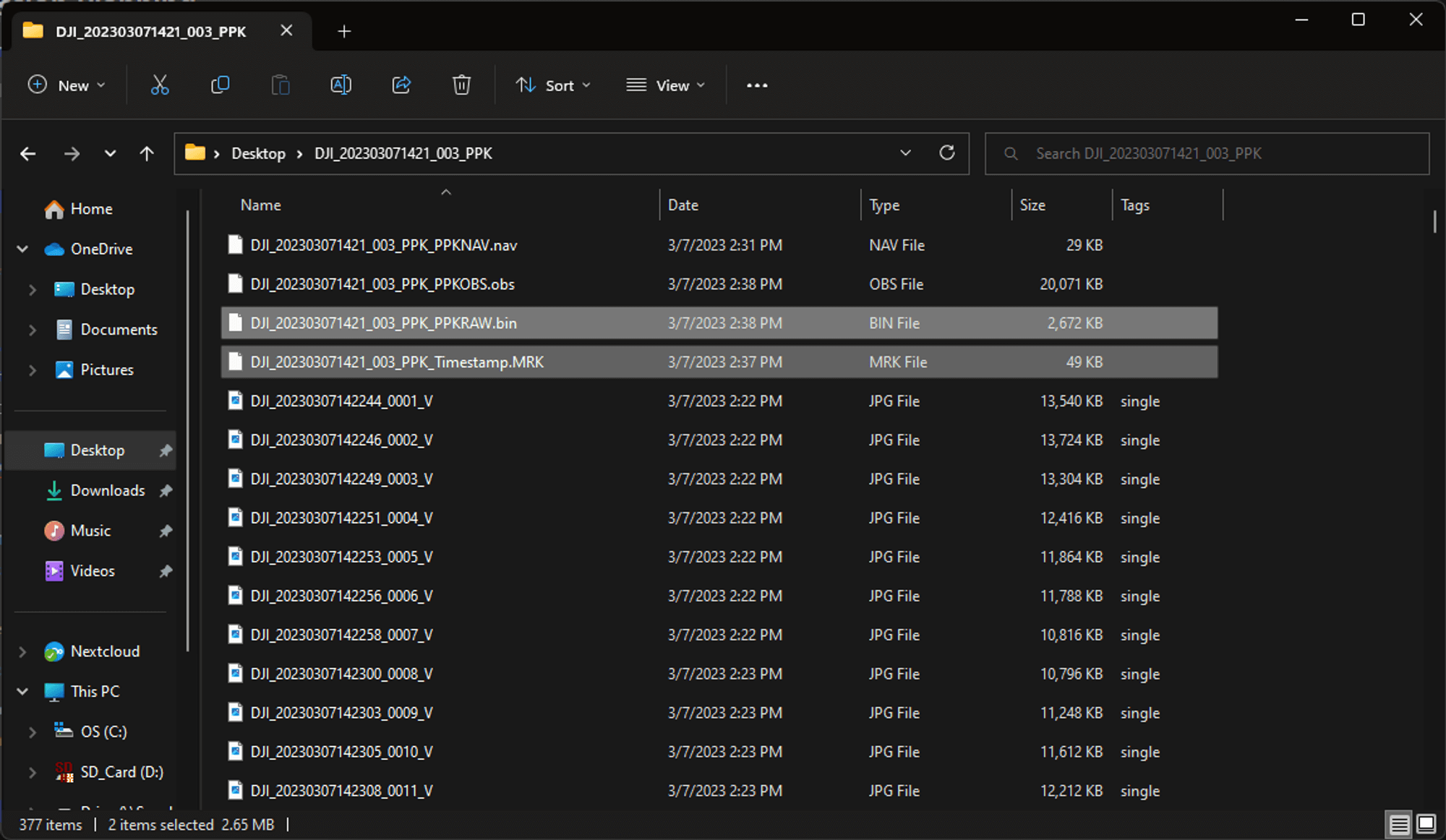
I dati del drone sono essenziali per una corretta elaborazione con il metodo PPK. Oltre alle immagini raw, sono necessari altri due file della cartella delle immagini: il file RINEX (Receiver Independent Exchange) del drone e il file con la marca temporale dell'immagine.
Il file RINEX del drone contiene misurazioni GPS non elaborate che sono essenziali per ottenere un'elevata precisione di posizionamento. Questi dati vengono utilizzati per correggere gli errori nel segnale GPS che possono verificarsi a causa di vari fattori, quali le condizioni atmosferiche e la posizione dei satelliti GPS. Senza questi dati, l'accuratezza del metodo PPK sarebbe gravemente compromessa. Il file RINEX, denominato "XXX_PPKRAW.bin", si trova nella cartella delle foto raw.
Il file contenente la marca temporale dell'immagine è altrettanto essenziale per ottenere risultati accurati. Questo file registra l'ora esatta di acquisizione di ciascuna immagine, un'informazione necessaria per sincronizzare correttamente i dati delle immagini con le misurazioni GPS. Senza queste informazioni, sarebbe molto difficile allineare accuratamente i dati di immagine con i dati GPS, con un conseguente impatto negativo sull'accuratezza dei risultati finali. Anche il file della marca temporale, denominato "XXX_Timestamp.MRK", si trova nella cartella delle foto raw.
È essenziale assicurarsi che questi file vengano raccolti ed elaborati correttamente al fine di ottenere la massima accuratezza possibile con il metodo PPK. Solo alcuni modelli di droni DJI Enterprise che supportano i sistemi RTK/PPK sono in grado di produrre questi file, tra cui:
DJI M300 RTK (solo con payload Zenmuse P1 o Zenmuse L1)DJI Mavic 3 Enterprise (solo con il modulo RTK collegato)
DJI Mavic 3 Multispectral (solo con il modulo RTK collegato)
DJI Phantom 4 RTK
Raccolta dei dati di riferimento
Per eseguire l'elaborazione PPK (Post-Processed Kinematic, cinematica di post-elaborazione) utilizzando una stazione base per i dati di riferimento, sono generalmente necessari due tipi di file correlati ai dati GNSS (Global Navigation Satellite System, sistema globale di navigazione satellitare): un file RINEX della base e un file di navigazione:
- File RINEX della base: questo file contiene i dati GNSS raw raccolti dalla stazione base, in genere in formato RINEX. Il file RINEX della base include misurazioni precise dei segnali satellitari, delle posizioni e delle informazioni relative alla data e all'ora e viene solitamente generato durante il volo del drone o in un momento quanto più possibile prossimo al volo. Il file RINEX della base viene utilizzato come riferimento per correggere i dati GNSS raw raccolti dal drone durante il volo.
- File di navigazione: questo file contiene informazioni sulla posizione e sull'orbita dei satelliti GNSS utilizzati per il progetto di mappatura. Il file di navigazione viene utilizzato dal software PPK per calcolare le informazioni di posizionamento precise per ciascuna immagine acquisita durante il volo dal drone. È possibile ottenere il file di navigazione da varie fonti, tra cui agenzie governative come il National Geodetic Survey (NGS) degli Stati Uniti o servizi online come l'International GNSS Service (IGS).
A titolo di esempio, in questa sezione utilizzeremo NGS CORS per ottenere i file GNSS.
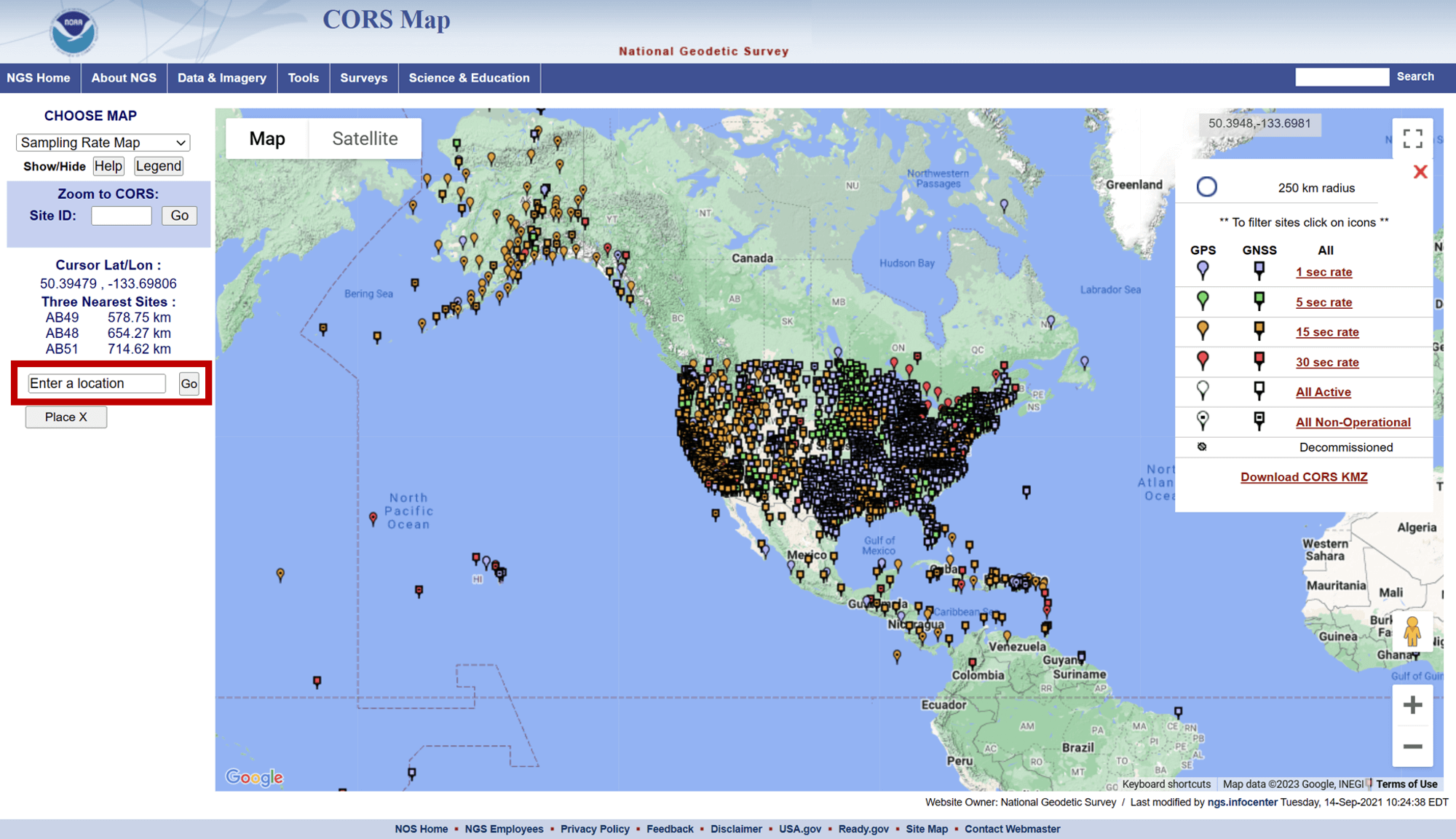
Per raccogliere i dati di riferimento CORS utilizzando il servizio UFCORS (User Friendly CORS) della NOAA (National Oceanic and Atmospheric Administration), procedere come segue:
- Accedere al sito NCN e selezionare Mappa NCN nella pagina Web.
- Inserire l'indirizzo del volo del drone nella casella di ricerca a sinistra e selezionare Vai:
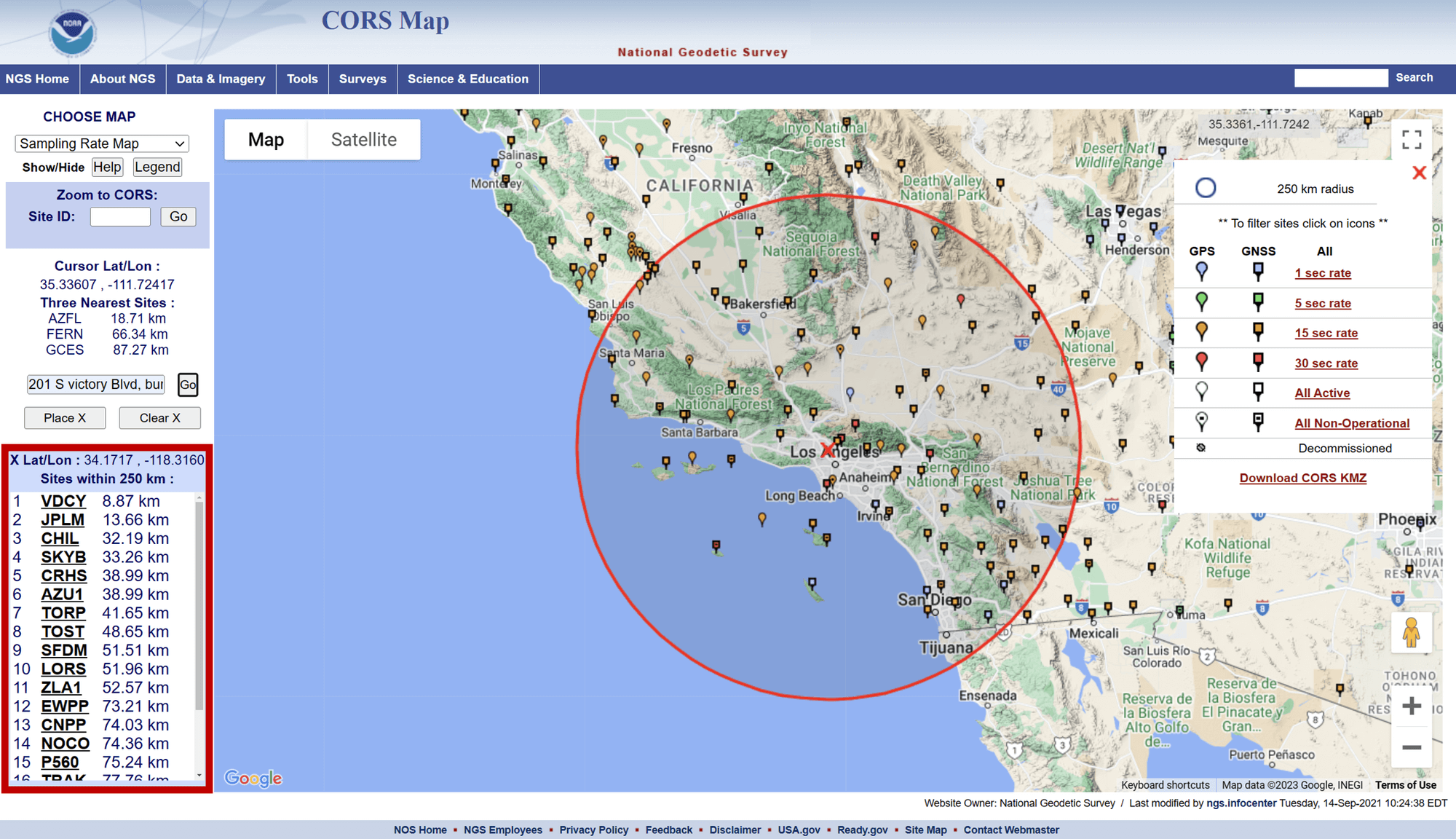
- Selezionare un sito con la linea di base più breve possibile (per linea di base si intende la distanza tra la stazione di riferimento GNSS e il drone. Una distanza della linea di base più breve solitamente garantisce risultati PPK più accurati, in quanto riduce il rischio di errori causati dalle condizioni atmosferiche e da altri fattori ambientali) e registrare il nome del sito. La distanza della linea di base tra il sito CORS e il drone può influire sulla qualità dei dati di riferimento utilizzati per l'elaborazione PPK. Una distanza della linea di base più lunga può comportare un maggior numero di errori dovuti alle condizioni atmosferiche e ad altri fattori ambientali, che potrebbero influire negativamente sull'accuratezza dei risultati PPK. Pertanto, si consiglia di utilizzare la distanza della linea di base più breve possibile, pur coprendo interamente l'area di mappatura. È sconsigliato l'uso di una linea di base superiore a 32 chilometri.
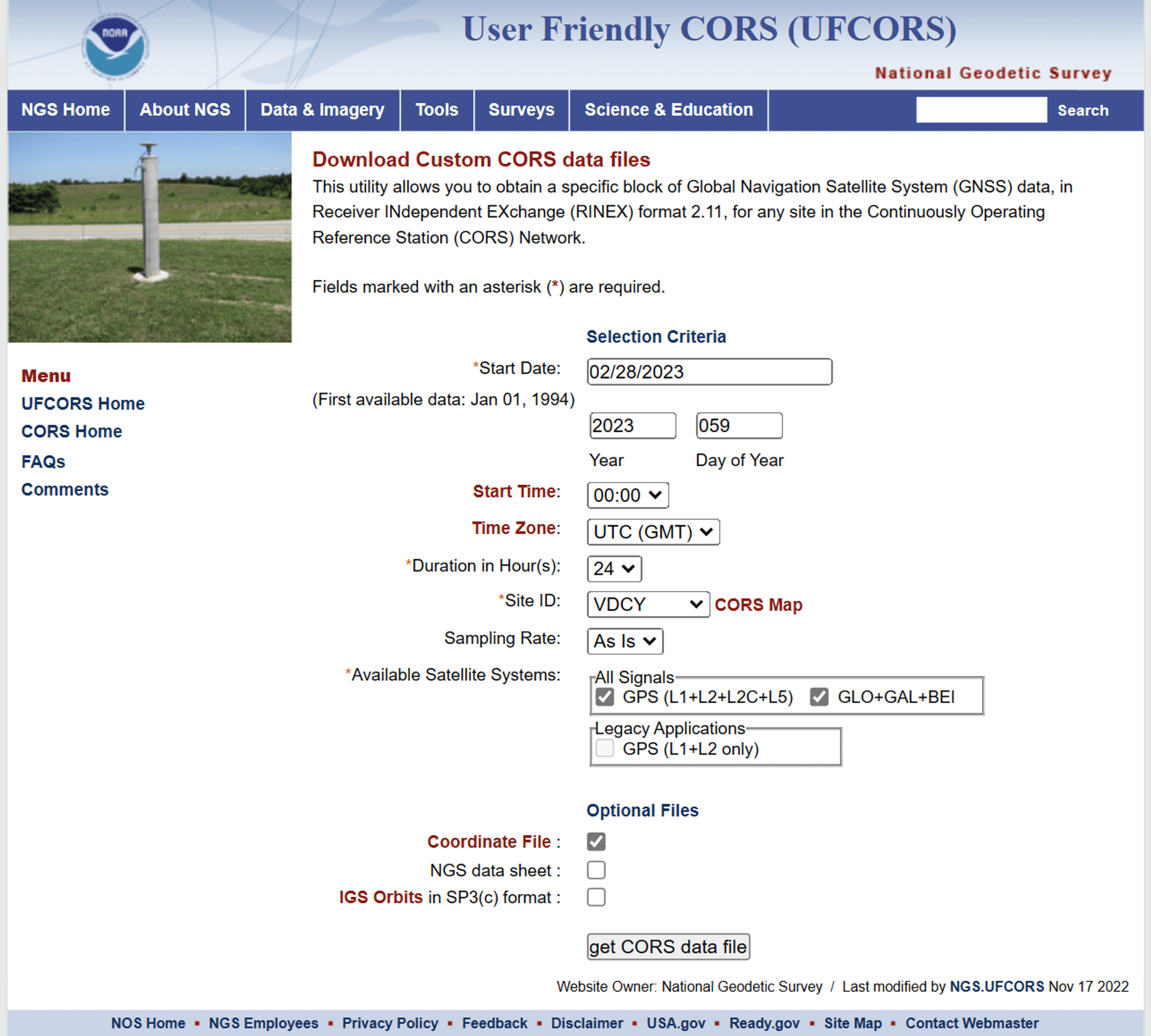
- Accedere al sito Web UFCORS e selezionare l'intervallo di date per i dati che si desidera recuperare. Selezionare "ottieni file di dati CORS" per scaricare i dati in un file compresso (ad es. .zip). È importante assicurarsi che i dati CORS vengano raccolti contestualmente ai dati di immagine del drone per garantire un'accurata elaborazione PPK. È necessario inoltre valutare attentamente la qualità dei dati CORS per assicurarsi che soddisfino gli standard di precisione richiesti per il progetto di mappatura. La pianificazione e l'esecuzione corrette della missione del drone e della raccolta dei dati CORS sono essenziali per garantire un'elaborazione PPK accurata e risultati di mappatura di alta qualità.
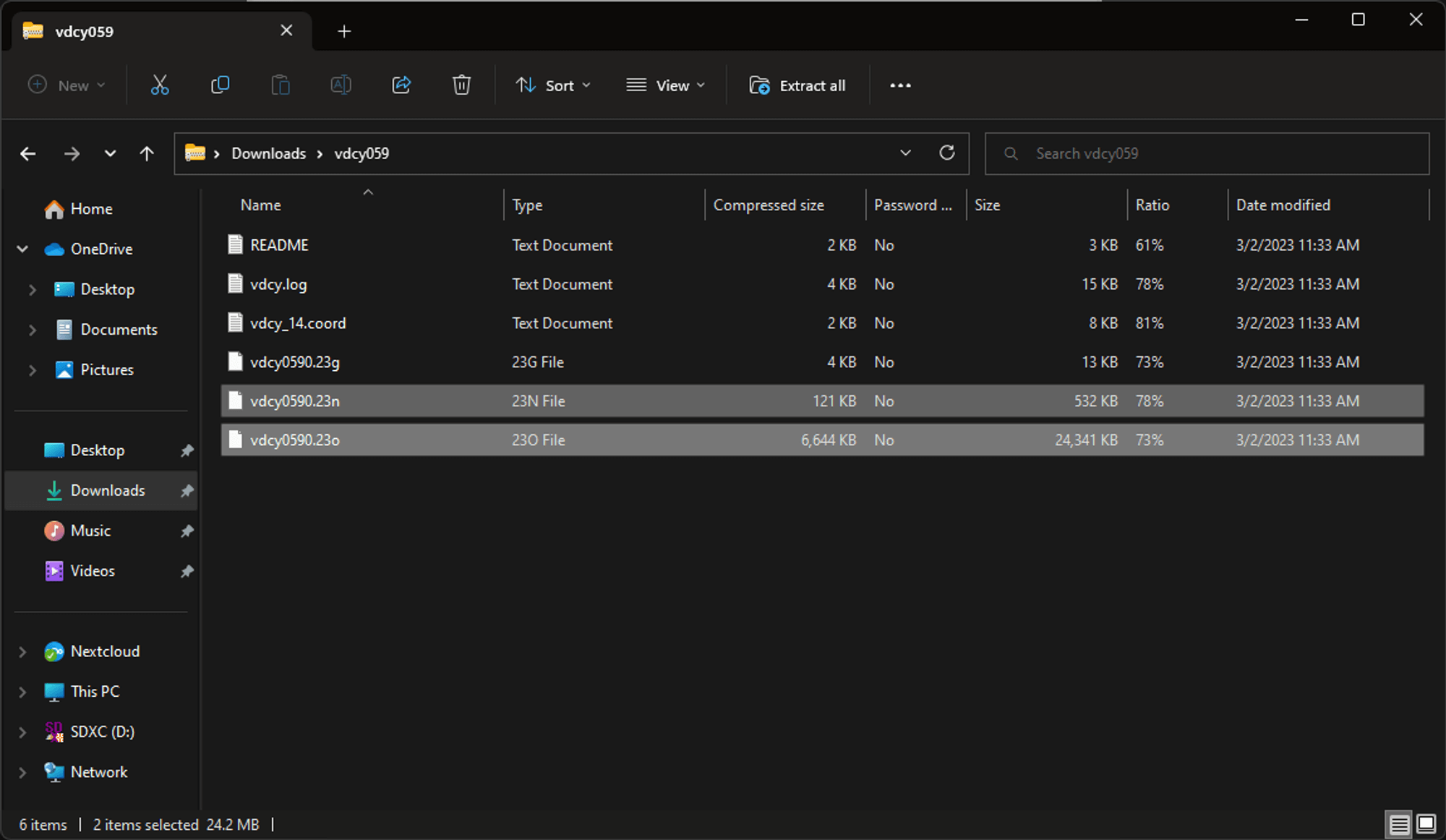
- Aprire il file zip scaricato e assicurarsi che contenga i due file seguenti: xxx.xxo (file RINEX della base) e xxx.xxn (file di navigazione).
Se non è presente alcuna stazione base NGS CORS nelle vicinanze del sito in cui opera il drone, la Stazione mobile DJI D-RTK 2 è un'opzione valida per ottenere i dati della stazione base per l'elaborazione PPK. A tale scopo, è sufficiente impostare la stazione base su un punto noto nelle coordinate WGS84 e l'altezza ellissoidale in metri. Eseguire quindi l'offset della posizione della stazione in base alle coordinate 3D del punto noto nell'app Pilot 2.
Assicurarsi di impostare prima il D-RTK 2 in loco e attendere alcuni minuti prima e dopo il volo per coprire l'intera durata del volo. Si consiglia inoltre di non spostare o inclinare la stazione base D-RTK 2 durante il volo del drone, poiché i cambiamenti di orientamento potrebbero causare l'interruzione della registrazione dei dati. Una volta completato il volo, collegare la stazione base a un computer tramite un cavo USB-C ed esportare i file RTCM (Radio Technical Commission for Maritime) in formato .dat registrati dopo il volo. Con la Stazione mobile DJI D-RTK 2, si può fare a meno di utilizzare apparecchiature aggiuntive e di incorrere nei costi di abbonamento eventualmente necessari per assicurare le comunicazioni in tempo reale. Ciò rende il metodo PPK più conveniente e offre una maggiore flessibilità per la raccolta dei dati, soprattutto in aree con copertura cellulare limitata o assente.
Allineamento dei dati ed elaborazione PPK
Questa sezione fornisce istruzioni dettagliate per l'utilizzo dei dati del drone con i file del rover GNSS raccolti da NGS CORS, dalle stazioni base di terzi o dalla Stazione mobile DJI D-RTK 2 per avviare l'elaborazione PPK. A titolo di esempio, utilizzeremo RedCatch REDToolBox.
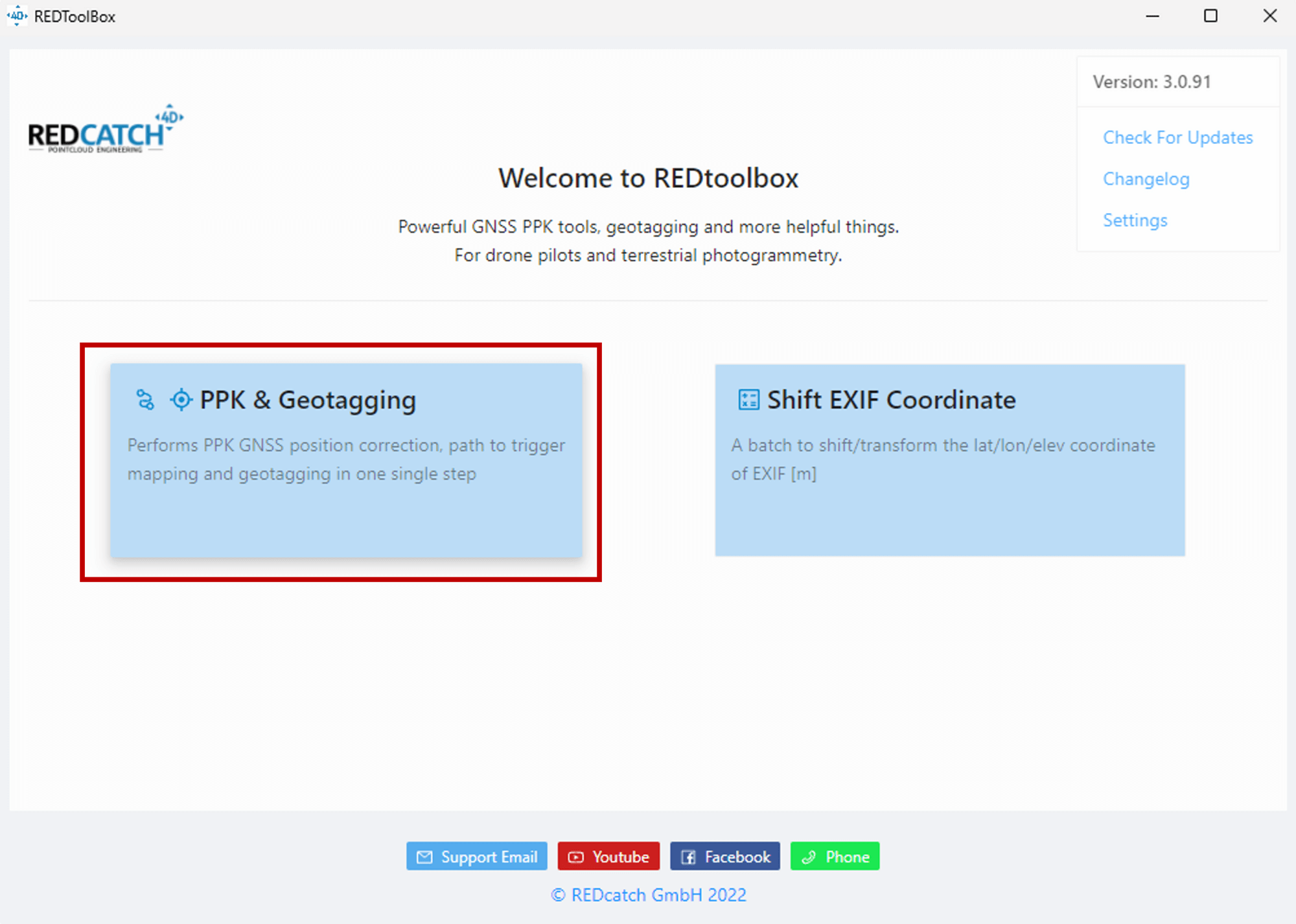
- Per iniziare, è necessario aprire RedCatch REDToolBox e selezionare l'opzione "PPK & Geotagging"
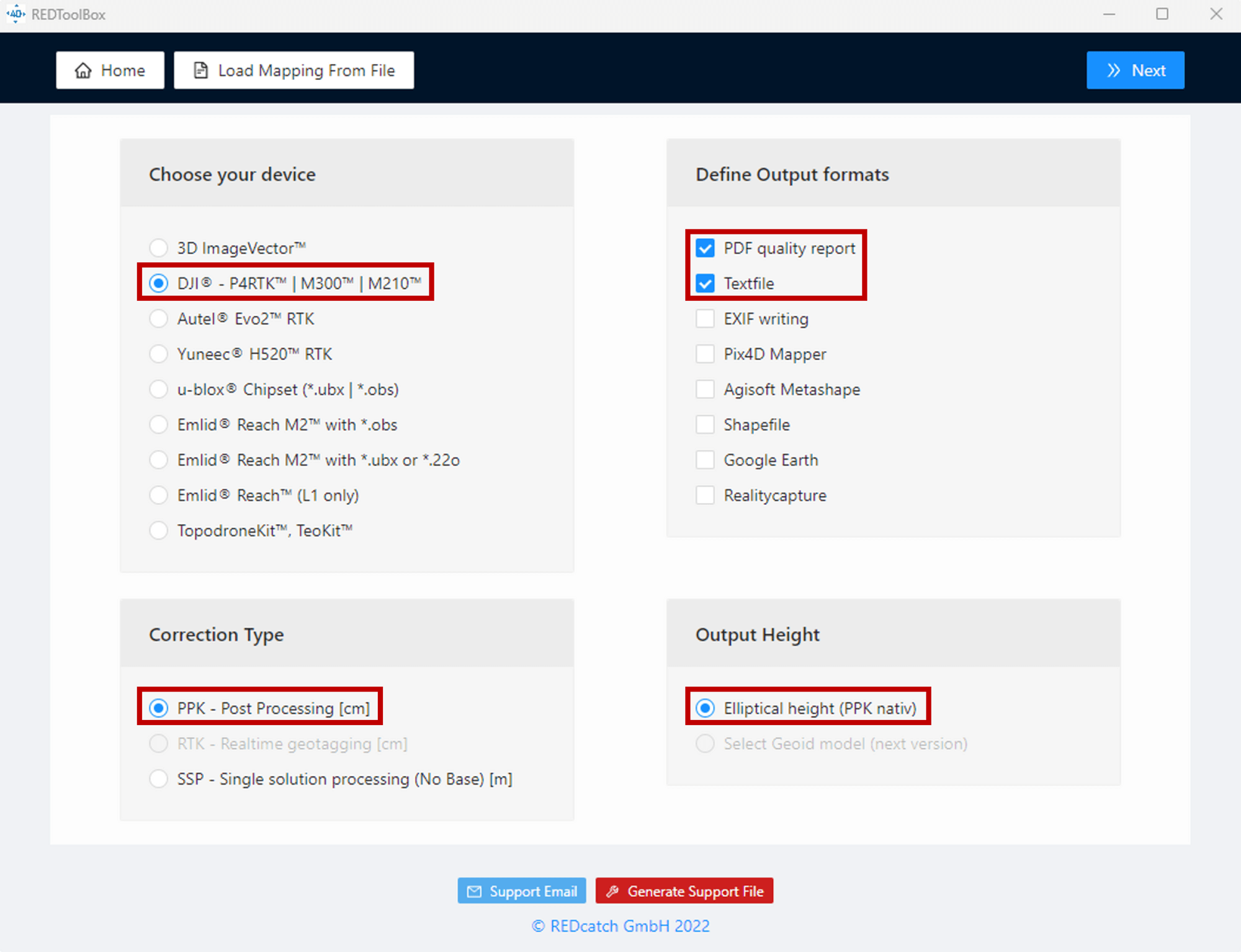
- L'opzione richiede di scegliere DJI come dispositivo e selezionare il rapporto sulla qualità in PDF e il file di testo come formati di output. Selezionare quindi l'opzione PPK come tipo di correzione e l'altezza ellittica (nativa PPK) come altezza di output. Una volta completate queste selezioni, cliccare su "Avanti".
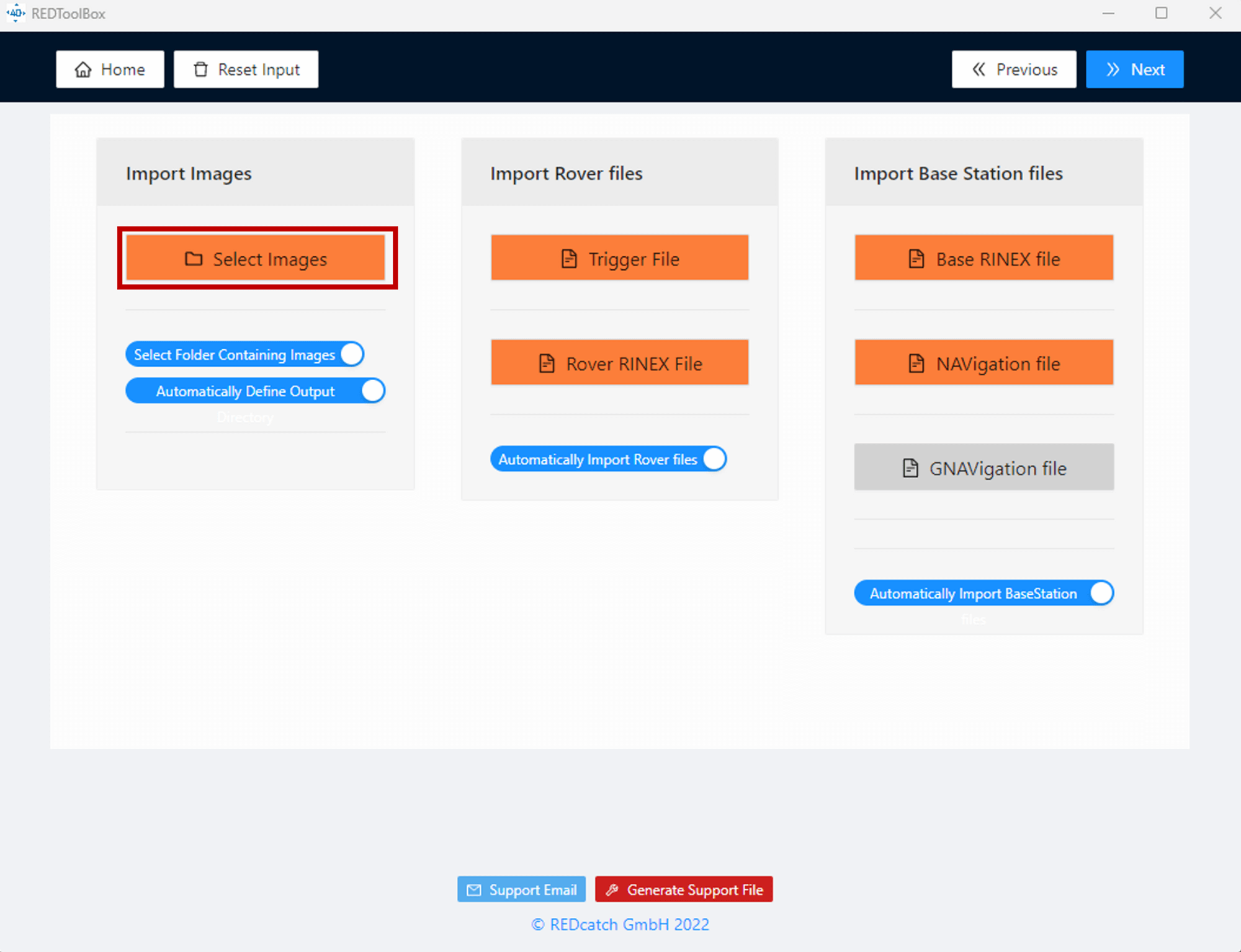
- Per importare le immagini, andare alla sezione "Importa immagini" e selezionare "Seleziona immagini" per definire la directory delle immagini raw. Questa operazione fa sì che le immagini vengano importate correttamente e possano essere utilizzate nell'elaborazione PPK.
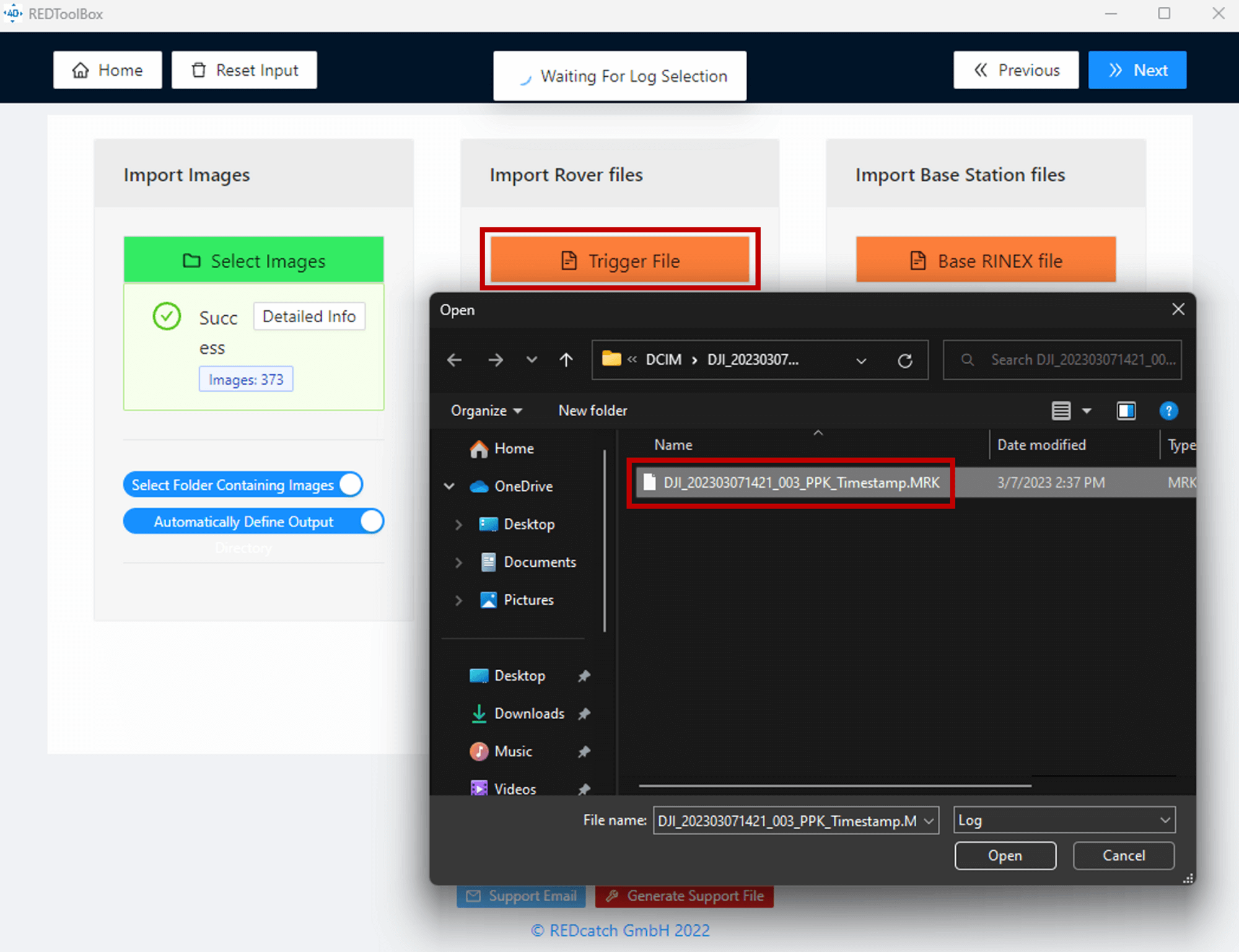
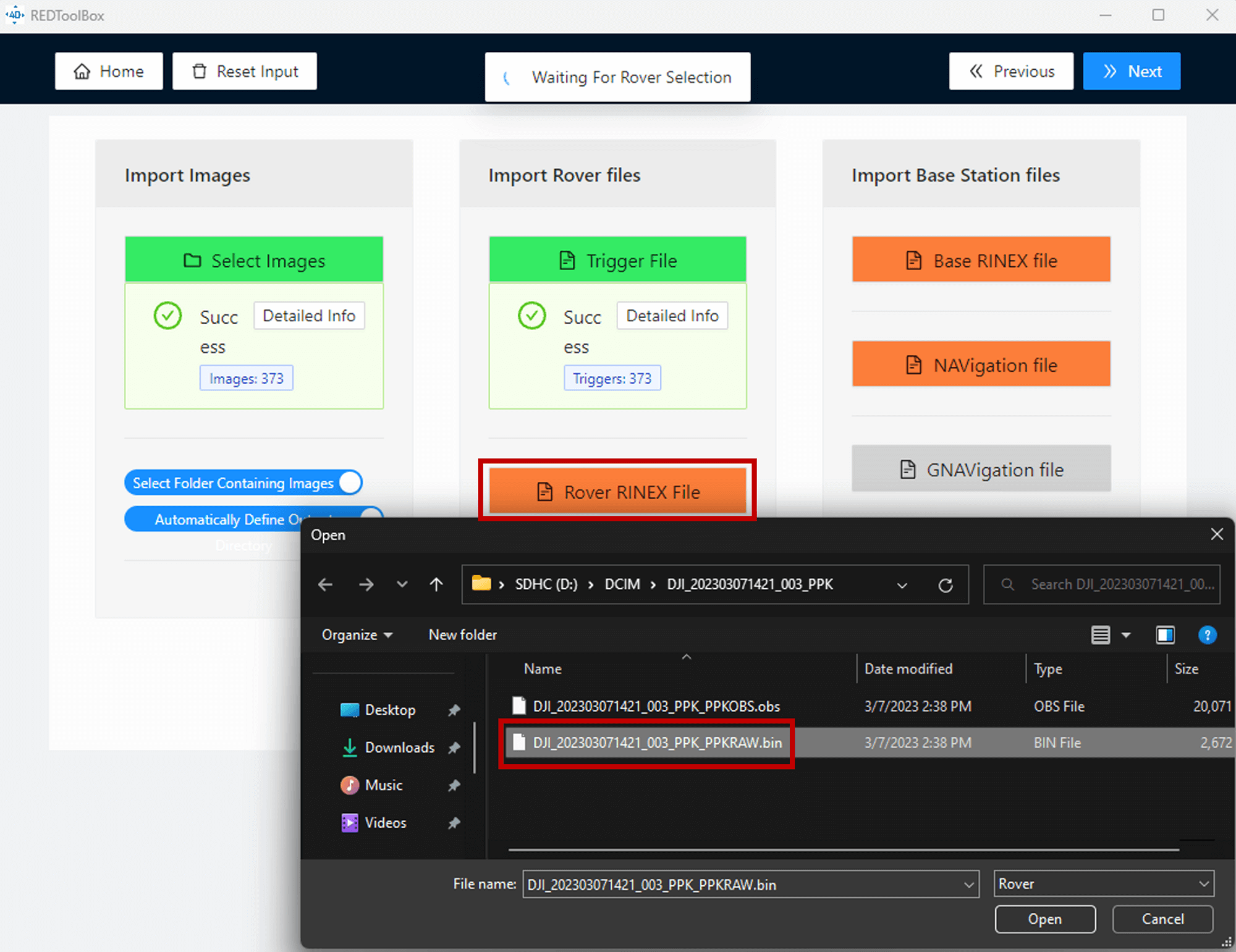
- Selezionare quindi la sezione "Importa file rover" e scegliere l'opzione "Attiva file". Qui è possibile importare il file MRK denominato "XXX_Timestamp.MRK" nella cartella delle immagini raw. Tale file fornisce importanti informazioni sulla marca temporale delle immagini che verranno utilizzate nell'elaborazione PPK.
- Dopo aver importato il file MRK, è necessario selezionare nuovamente l'opzione "File RINEX del rover" e importare il file RINEX con il nome "XXX_PPKRAW.bin" nella cartella delle immagini raw. Assicurarsi di selezionare il file corretto, poiché sarà fondamentale per il buon esito dell'elaborazione PPK.
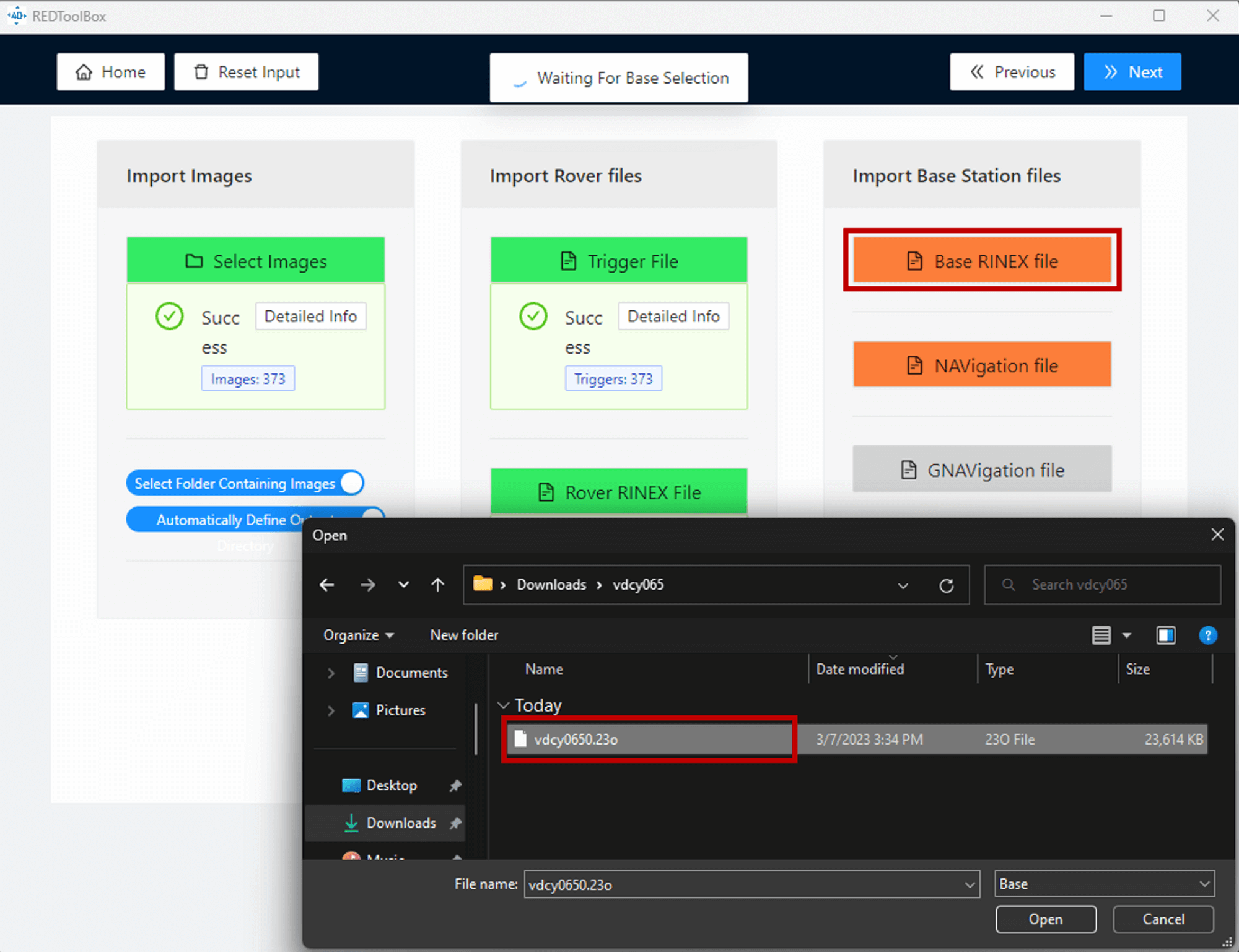
- Passare alla sezione "Importa file stazione base", selezionare l'opzione "File RINEX della base" e importare il file RINEX denominato "XXX.xxo" dalla cartella contenente i dati satellitari raw scaricati dal sito UFCORS. Se si utilizza la Stazione mobile DJI D-RTK 2 per l'elaborazione PPK, selezionare e importare il file RTCM con formato .dat. Se è necessario unire più file RTCM .dat in un singolo file, utilizzare il seguente strumento ed eseguirlo nella stessa directory dei file RTCM multipli: merge_bin.bat
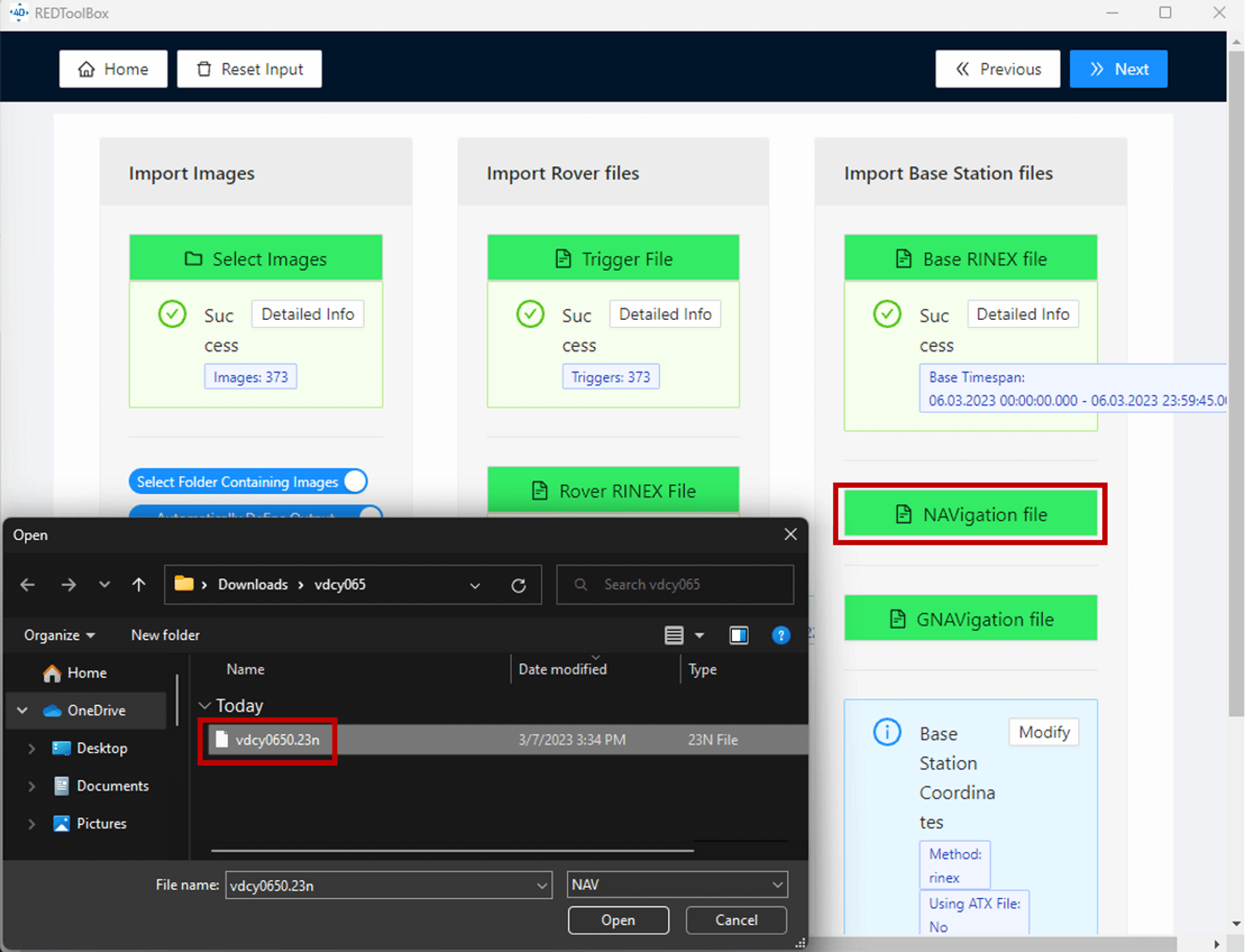
- Dopo aver selezionato il file XXX.xxo dalla cartella dei dati satellitari raw, verranno importati automaticamente i file NAVigation e GNAVigation. Se ciò non accade, è possibile trovare questi file all'interno della cartella dei dati satellitari raw scaricati dal sito UFCORS.
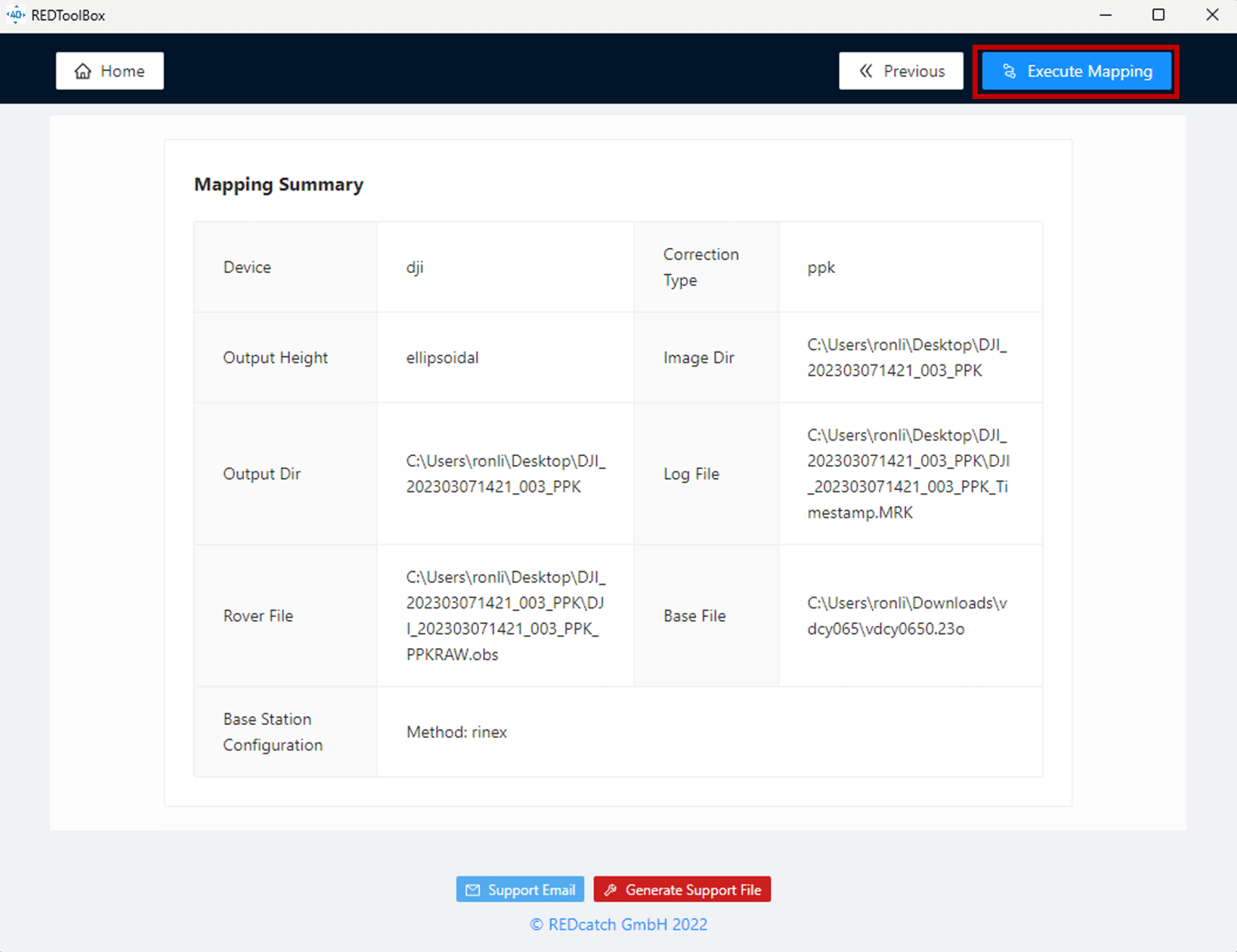
- Infine, rivedere il riepilogo della mappatura e selezionare "Esegui mappatura" per avviare l'elaborazione PPK.
- Al termine del processo, selezionare "Rapporto sulla qualità in PDF" e "file di testo", quindi selezionare l'opzione "Genera output da mappatura".
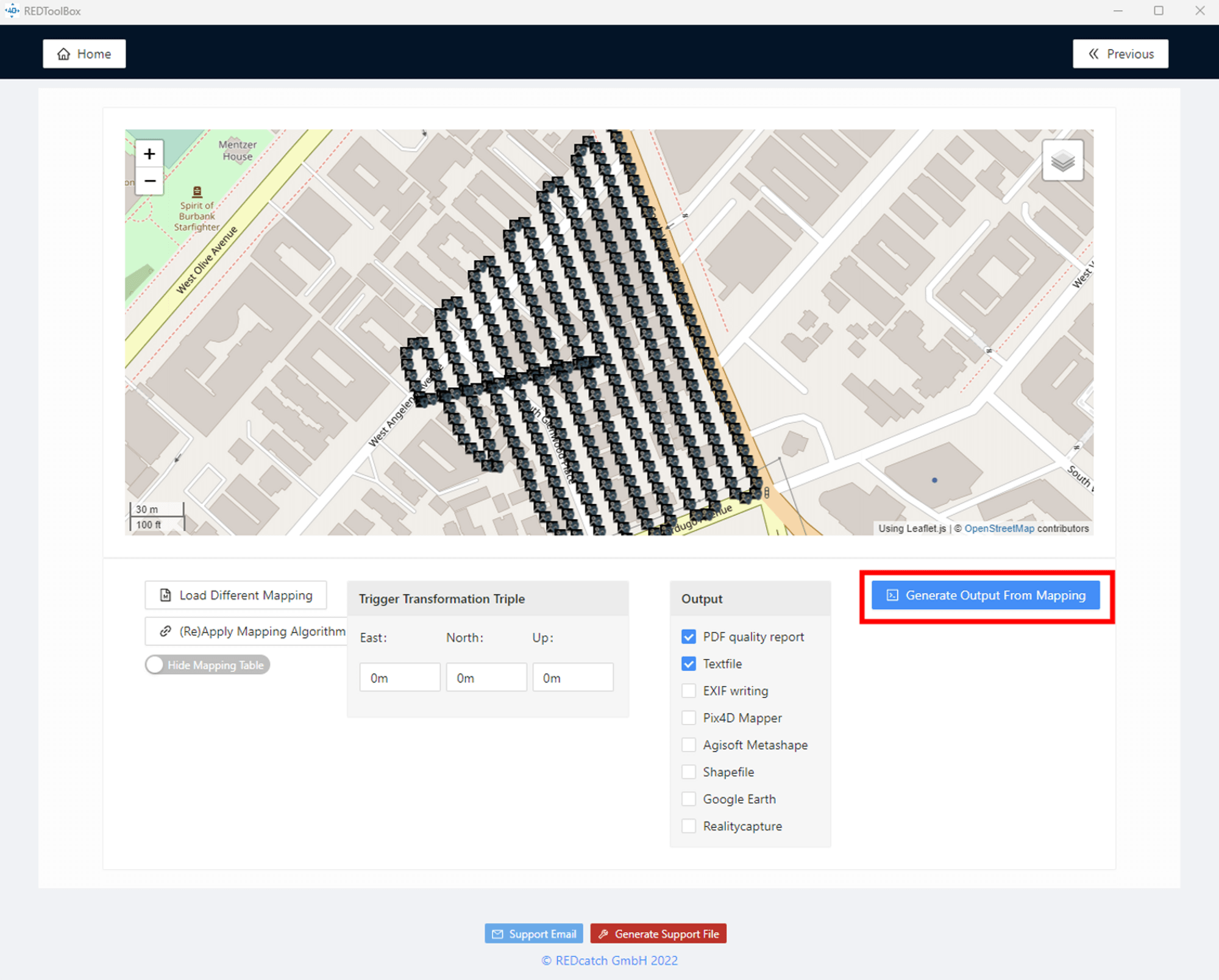
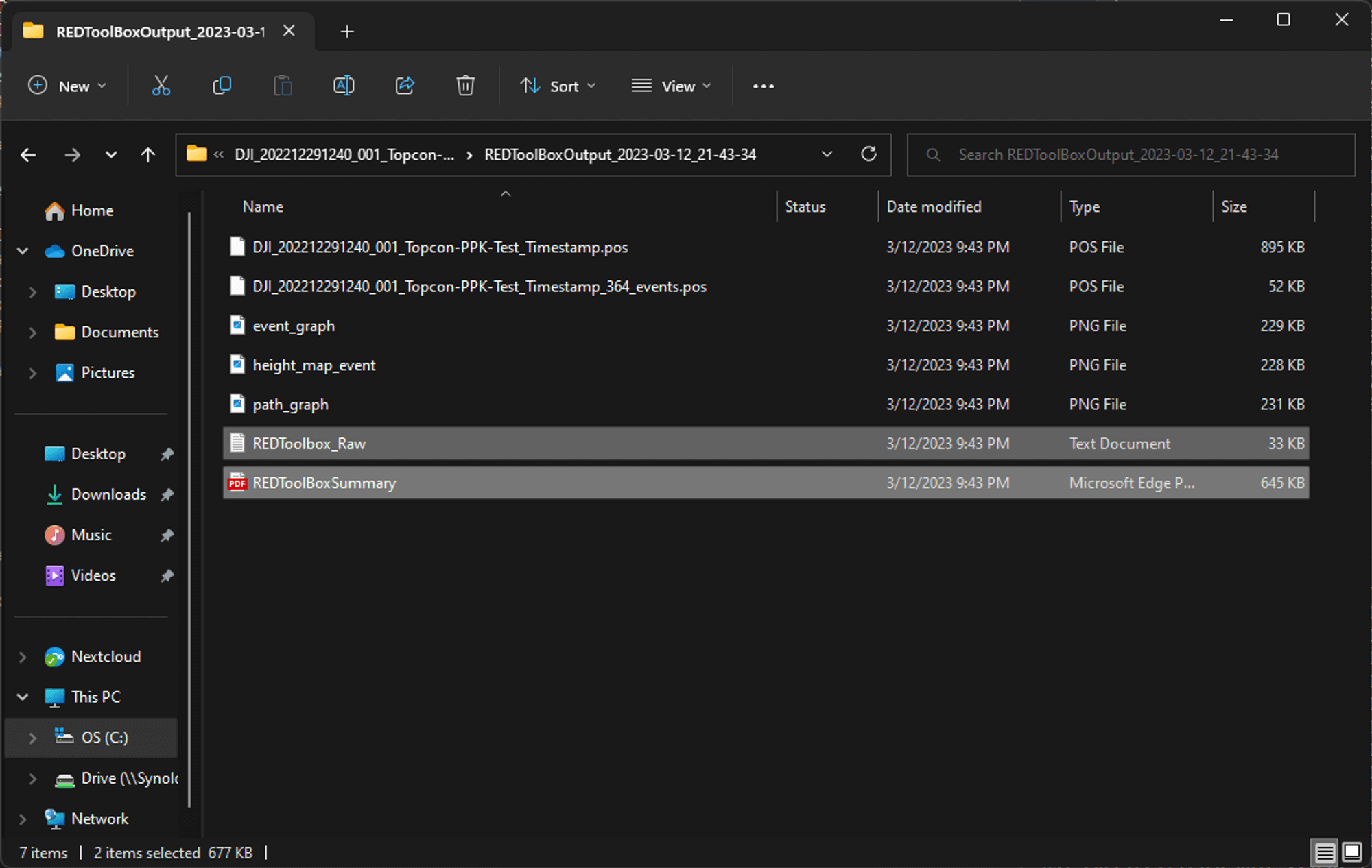
- Per accertarsi che i dati POS corretti (REDToolbox_Raw.txt) e il rapporto di riepilogo (REDToolBoxSummary.pdf) siano entrambi esportati, aprire la cartella di output. Successivamente, si utilizzerà il primo file di marca temporale con i dati POS delle immagini corretti per l'elaborazione della fotogrammetria.
Sovrascrittura dei dati POS
I dati POS (posizione e orientamento) delle immagini del drone forniscono informazioni relative alla posizione, all'assetto e alla traiettoria del drone durante l'acquisizione delle immagini. Questi dati vengono in genere ottenuti utilizzando il GPS e altri sensori integrati nel drone e consentono di georeferenziare con precisione le immagini per creare un modello 3D o una mappa dell'area rilevata utilizzando tecniche fotogrammetriche.
Nell'elaborazione fotogrammatica, i dati POS delle immagini del drone vengono utilizzati nel processo di aerotriangolazione per stabilire accuratamente la posizione e l'orientamento di ciascuna immagine nello spazio 3D. Il processo di aerotriangolazione prevede il calcolo delle posizioni e degli orientamenti relativi delle immagini in base alle loro sovrapposizioni e alle caratteristiche delle immagini corrispondenti. I dati POS delle immagini del drone consentono di calcolare l'orientamento di ciascuna immagine nello spazio 3D e queste informazioni vengono utilizzate per generare una nuvola di punti rada che rappresenta l'area rilevata.
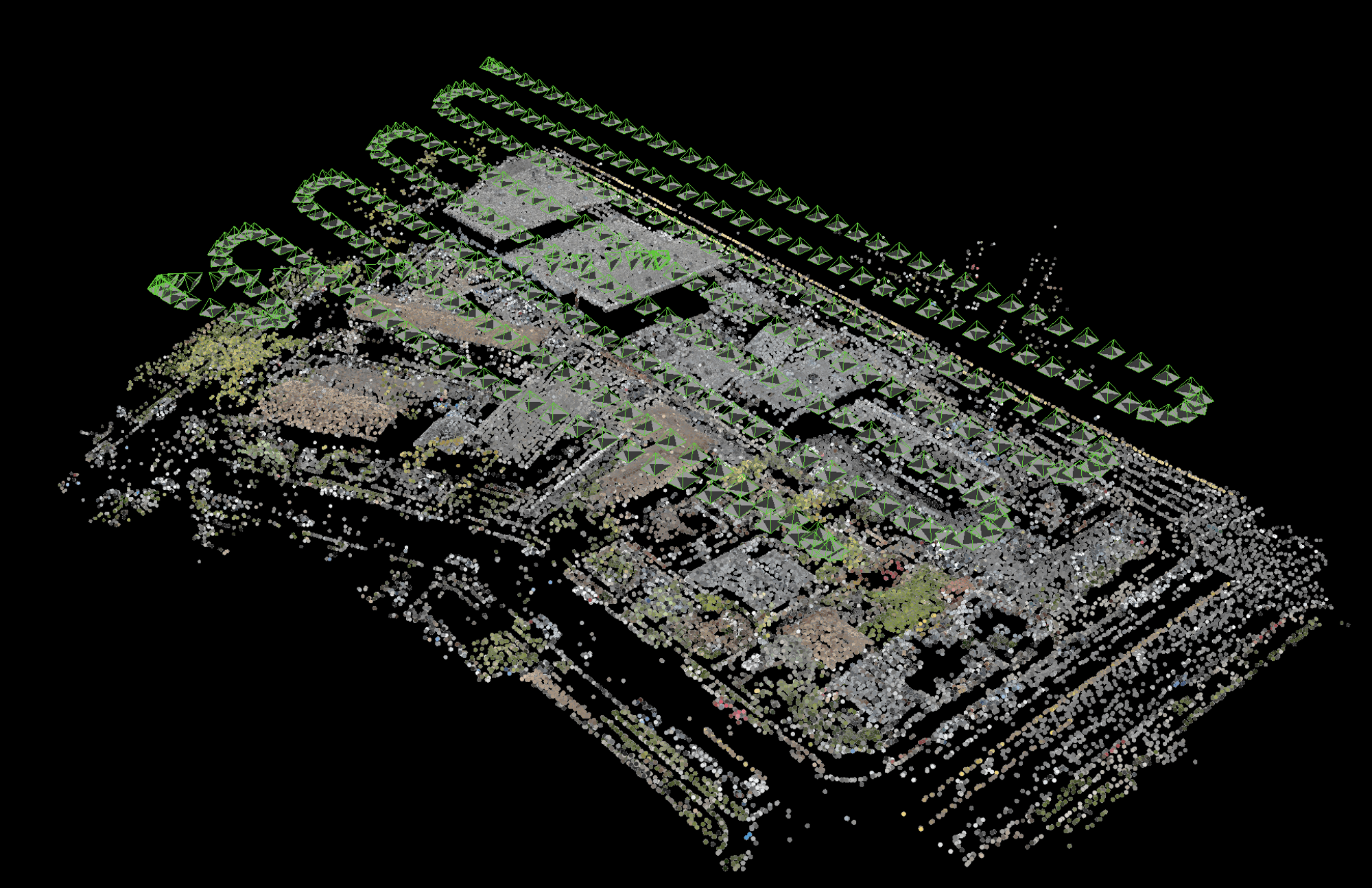 Modello di aerotriangulazione generato in base ai dati POS delle immagini
Modello di aerotriangulazione generato in base ai dati POS delle immagini
Se i dati POS delle immagini del drone sono inaccurati o imprecisi, anche il risultato del processo di fotogrammetria sarà meno accurato. Eventuali errori nei dati POS delle immagini del drone possono causare errori nel processo di aerotriangolazione, con conseguenti errori nel processo di bundle adjustment, e comportare, in ultima analisi, un output meno accurato.
La precisione dei dati POS delle immagini del drone influisce sulla precisione globale dell'output durante l'elaborazione PPK. L'elaborazione PPK corregge i dati POS delle immagini del drone per eliminare eventuali errori causati dalla deriva o dal rumore dei segnali GPS e altri errori correlati ai sensori. I dati POS con correzione PPK così ottenuti consentono di generare una nuvola di punti densa che rappresenta l'area rilevata e che può essere successivamente utilizzata per creare modelli o mappe 3D. È quindi importante accertarsi che i dati POS delle immagini del drone siano definiti correttamente nel software di elaborazione fotogrammatica.
Per applicare e sovrascrivere i dati POS delle immagini, utilizzeremo a titolo di esempio il software DJI Terra. Attenersi alla procedura seguente o guardare il video per applicare e sovrascrivere i dati POS delle immagini con correzione PPK nel software Terra:
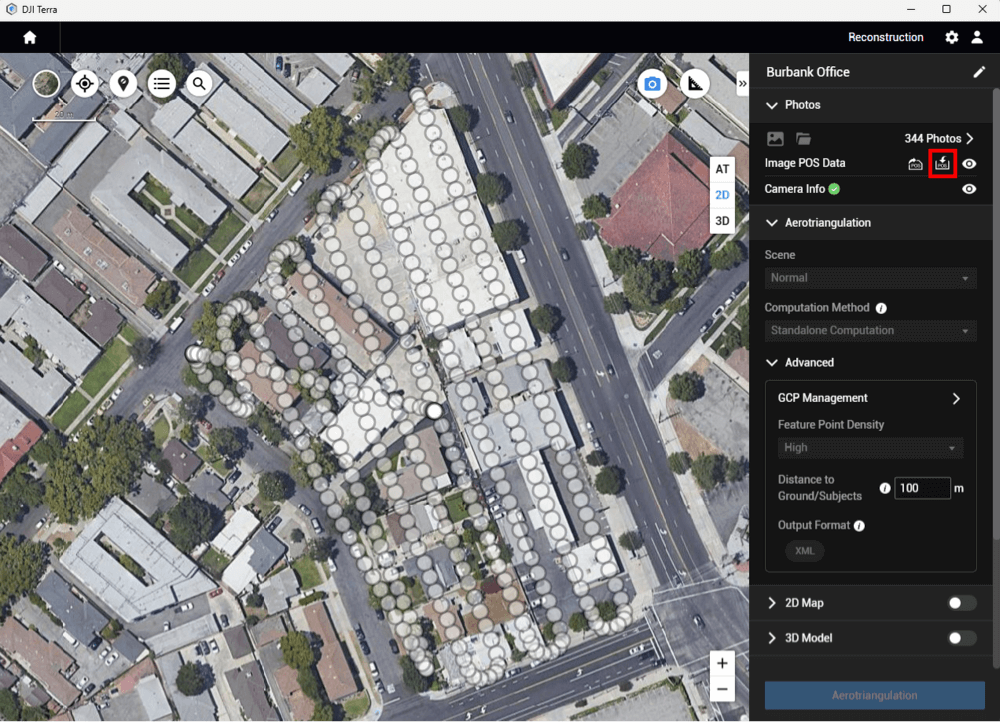
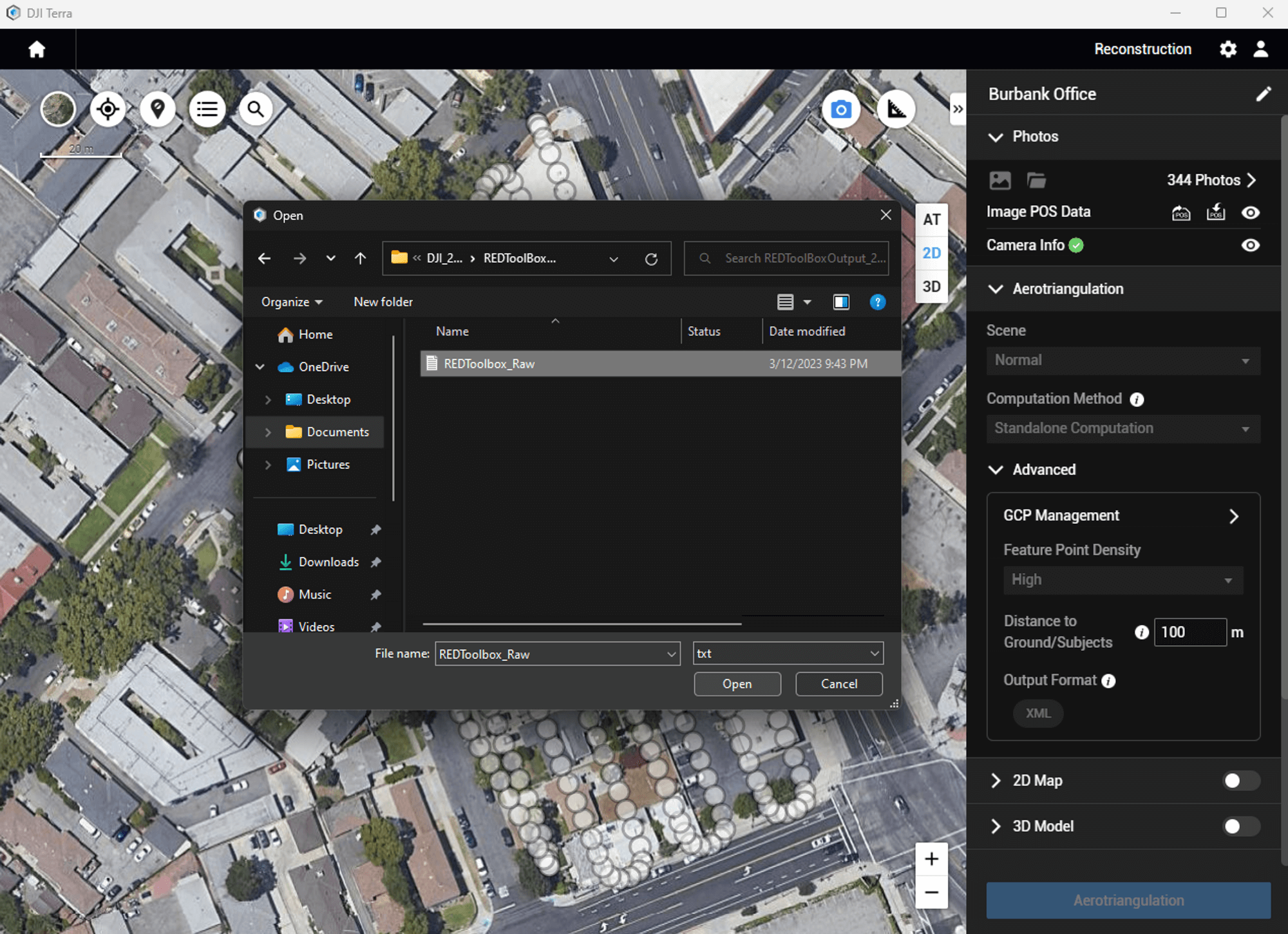
- Aprire il software DJI Terra e selezionare "Nuova missione" nella scheda "Ricostruzione"; selezionare quindi "Luce visibile" per creare una nuova missione di ricostruzione fotogrammatica. Dopo aver importato tutte le foto, selezionare l'opzione "Importa dati POS", come mostrato di seguito.
- Accertarsi che il file POS elaborato venga importato in formato testo dall'ultima sezione.
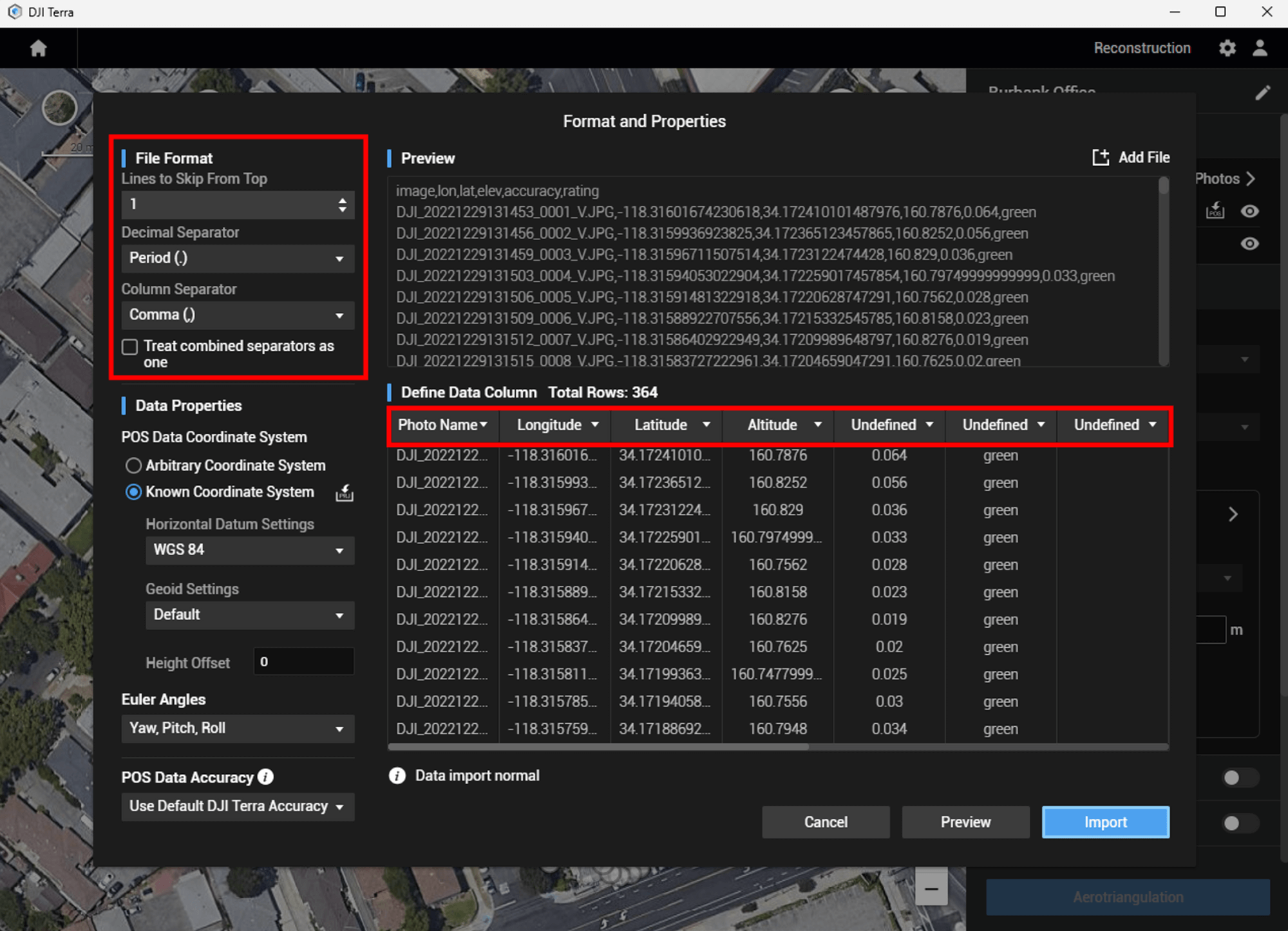
- Dopo aver importato i dati POS delle immagini, viene visualizzata automaticamente la finestra "Formato e proprietà". In questa finestra, regolare la colonna dei dati e definire le proprietà della colonna nella sezione "Definisci colonna dati". Assicurarsi che la prima riga della tabella contenga i dati POS della prima immagine e utilizzare gli strumenti disponibili nella sezione "Formato file" per definire i separatori di dati e la prima riga dei dati.
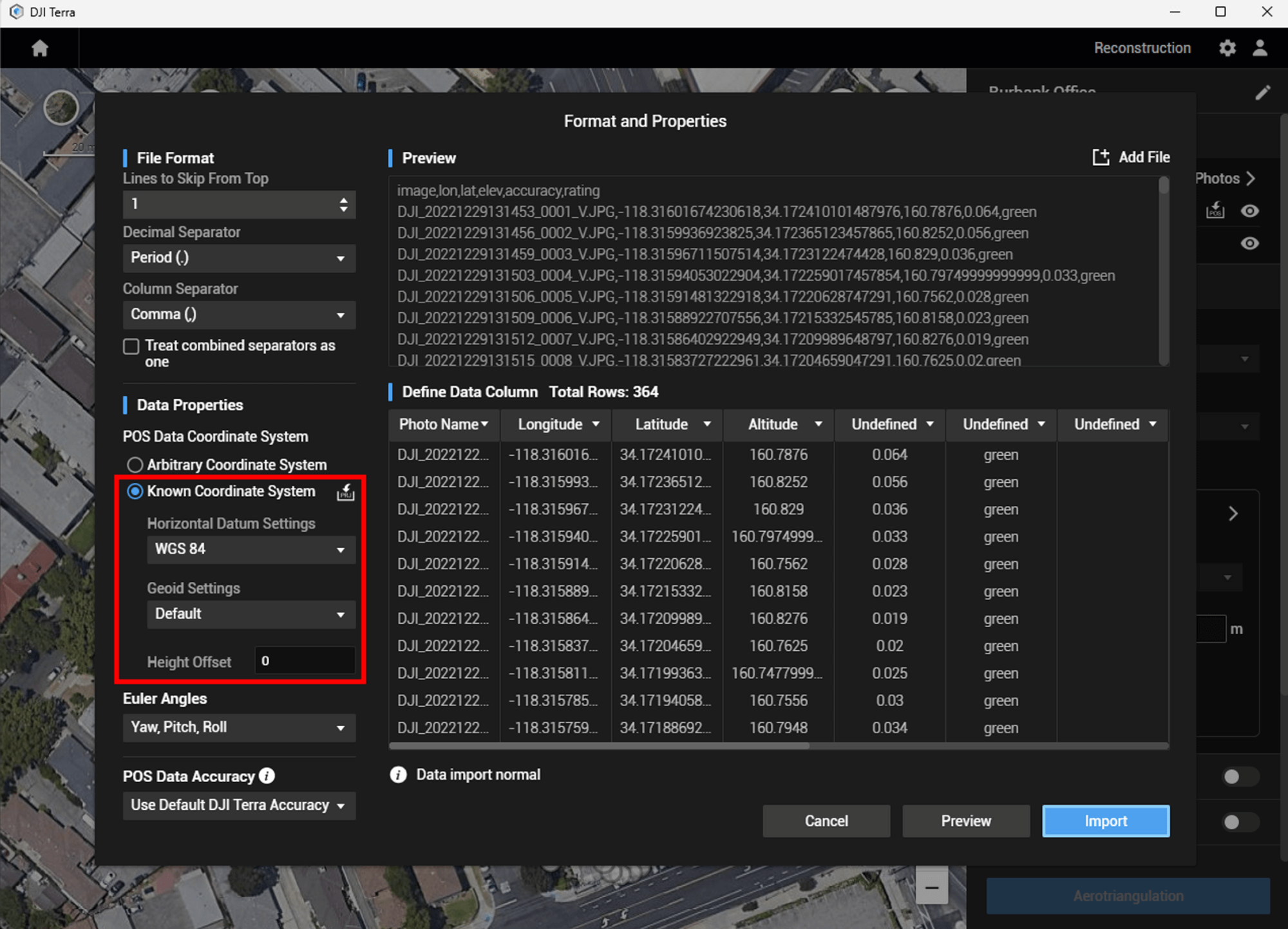
- Per procedere, selezionare l'opzione "Sistema di coordinate note" nel sistema di coordinate dei dati POS. Scegliere quindi le coordinate orizzontali e verticali corrispondenti per i dati POS delle immagini elaborati con PPK e importati. È fondamentale selezionare le coordinate corrette per i sistemi orizzontali e verticali per evitare spostamenti nell'output. In caso di dubbi sul sistema di coordinate da scegliere, è possibile trovare il sistema di coordinate dei dati POS elaborati con PPK nelle impostazioni del software PPK o nel rapporto sulla qualità dell'elaborazione PPK dei dati. In genere, il sistema orizzontale dovrebbe essere espresso in WGS84 (EPSG:4326) mentre il sistema verticale in altezza ellissoidale (in metri, impostabile su Valore predefinito in DJI Terra). Dopo aver definito i nuovi dati POS, selezionare "Importa".
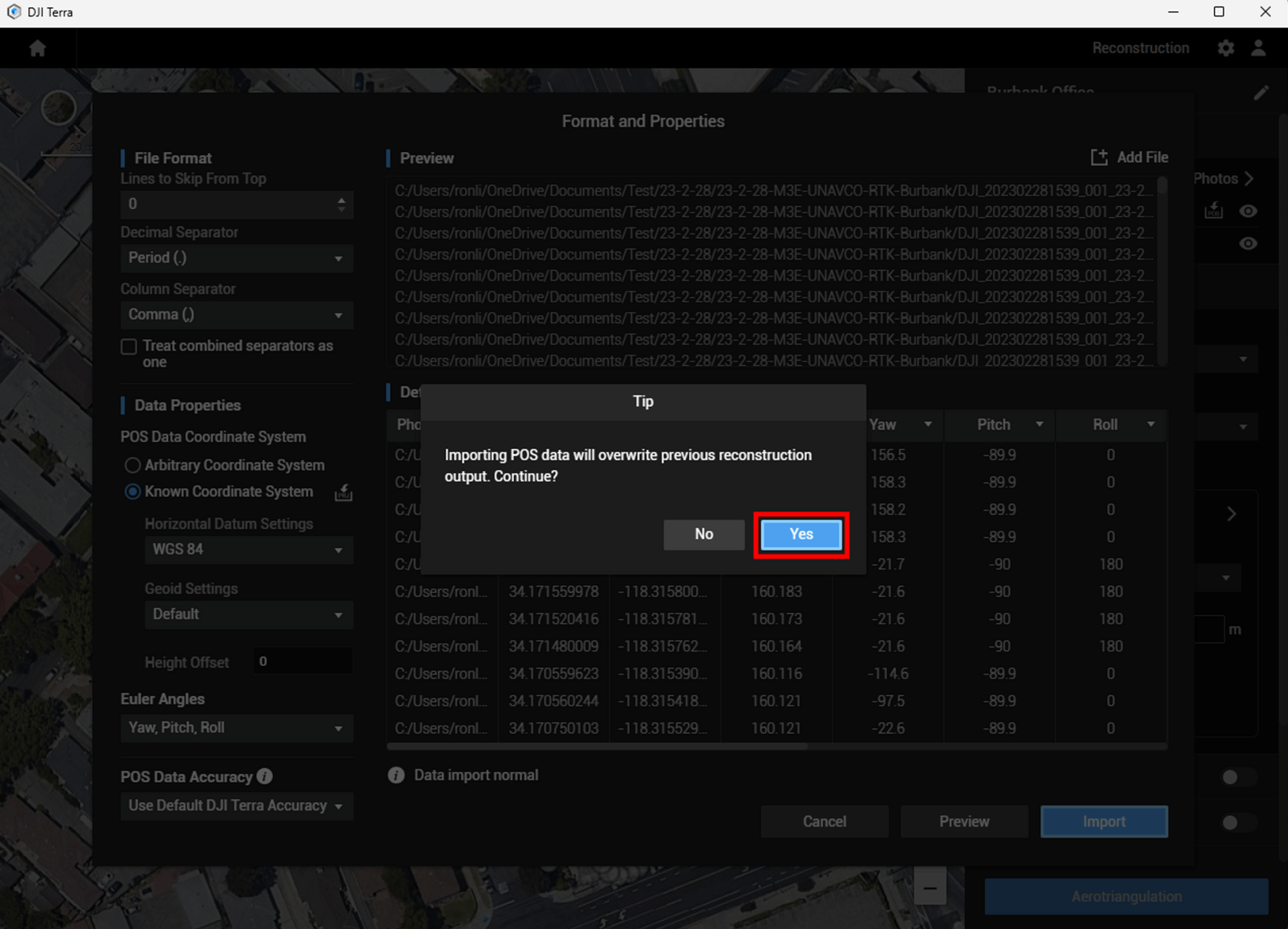
- Se si desidera sostituire i dati POS delle vecchie immagini incorporati nelle foto con i dati POS corretti con PPK del file txt, selezionare "Sì" per confermare l'azione in DJI Terra. Ora i dati POS risultano sovrascritti correttamente.
Flusso generale di processo LiDAR PPK
-
Per elaborare i dati DJI LiDAR con il metodo PPK, assicurarsi di preparare prima il file di riferimento della stazione base. DJI LiDAR supporta i seguenti formati di file della stazione base e la versione corrispondente:
Formato dei dati Versione Tipo di messaggio Nome e suffisso del file devono essere rinominati in: RINEX V2.1.x / DJI_YYYYMMDDHHMM_XXX.obsRTCM V3.0
V3.2
V3.0: 1003, 1004, 1012, 1014 V3.2: MSM4, MSM5, MSM6, MSM7 DJI_YYYYMMDDHHMM_XXX.rtcm OEM OEM4
OEM6
RANGEDJI_YYYYMMDDHHMM_XXX.oemUBX / RAWX DJI_YYYYMMDDHHMM_XXX.ubx Si raccomanda che la linea di base, o la distanza tra la stazione di base utilizzata per registrare il PPK e l'aeromobile, sia entro 10 km. il file della stazione di base utilizzato per il processo PPK deve contenere l'intera durata della scansione LiDAR.
-
Per rinominare il file di riferimento della stazione base, seguire la tabella riportata sopra. È importante rinominare correttamente sia il nome del file che il suffisso dell'estensione del file dei dati di riferimento della stazione di base. Il nome del file di riferimento della stazione di base deve essere identico e corrispondere a quello di altri file grezzi LiDAR. Per il file RINEX, ricordarsi di cambiare l'estensione del file da .YYO a .obs.
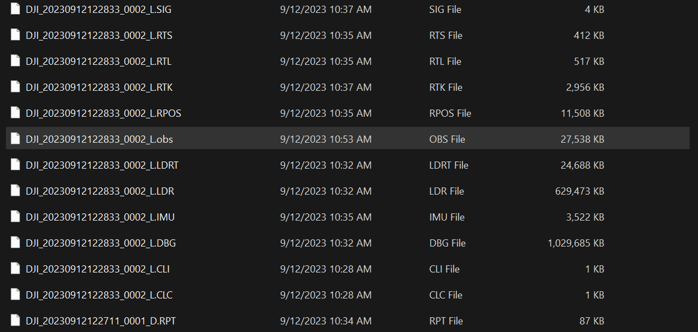
-
Assicurarsi che il file di riferimento della stazione base rinominato si trovi nella stessa directory della cartella dei dati LiDAR grezzi. Quindi, importare la cartella dei dati LiDAR grezzi in DJI Terra e avviare il processo. DJI Terra leggerà automaticamente il file di riferimento della stazione base e avvierà il processo PPK con il riferimento della stazione base PPK.
-
Grazie
PPK offre una soluzione efficiente e accurata per ottenere dati geospaziali altamente precisi per una varietà di applicazioni. Sfruttando il GPS e le tecniche di post-elaborazione, PPK consente di ottenere risultati di precisione centimetrica, anche in ambienti difficili. Seguendo il flusso di lavoro PPK sopra descritto e utilizzando strumenti software e hardware avanzati, è possibile assicurarsi di ottenere il massimo livello di accuratezza e precisione nei dati, portando in ultima analisi a un migliore processo decisionale e a risultati migliori.



-1.png?width=300&name=M400%20(1)-1.png)
