
La transformation numérique est en plein essor dans tous les secteurs, et une partie de cette transformation concerne la création de jumeaux numériques d’actifs physiques. Un jumeau numérique est une représentation numérique d’un objet physique pouvant comporter un modèle 3D ainsi que d’autres données de capteurs. Les jumeaux numériques sont utilisés pour l'inspection, la gestion et la maintenance d’actifs physiques.
Création de jumeaux numériques
Les drones jouent un rôle essentiel en fournissant des données pour créer des jumeaux numériques. Disposer d’une caméra à chaque endroit autour d’un actif offre des avantages en termes de vitesse, de fréquence et de sécurité. Les données de drones sont utilisées pour inspecter l’actif et pour créer un modèle 3D à l’aide de la photogrammétrie.
La capture de données de qualité à l’aide d’un drone pour créer un modèle 3D haute résolution peut s’avérer difficile, en particulier pour certains actifs, tels que deux bâtiments gigantesques dans un environnement urbain.
Pour obtenir des résultats de modèle 3D professionnels, un pilote doit capturer des images d’une certaine manière, notamment en gérant des variables telles que la superposition des images, les angles de caméra, la distance d’échantillonnage et l’exposition des images pour chaque façade de bâtiment. Le pilote doit concilier tous ces facteurs tout en étant conscient de son environnement, en respectant les réglementations, en garantissant la sécurité et bien plus encore.
Alors, comment capturer en toute sécurité les images nécessaires d’un site complexe tel que deux bâtiments dans un environnement urbain ?
La réponse réside dans l’automatisation des vols.
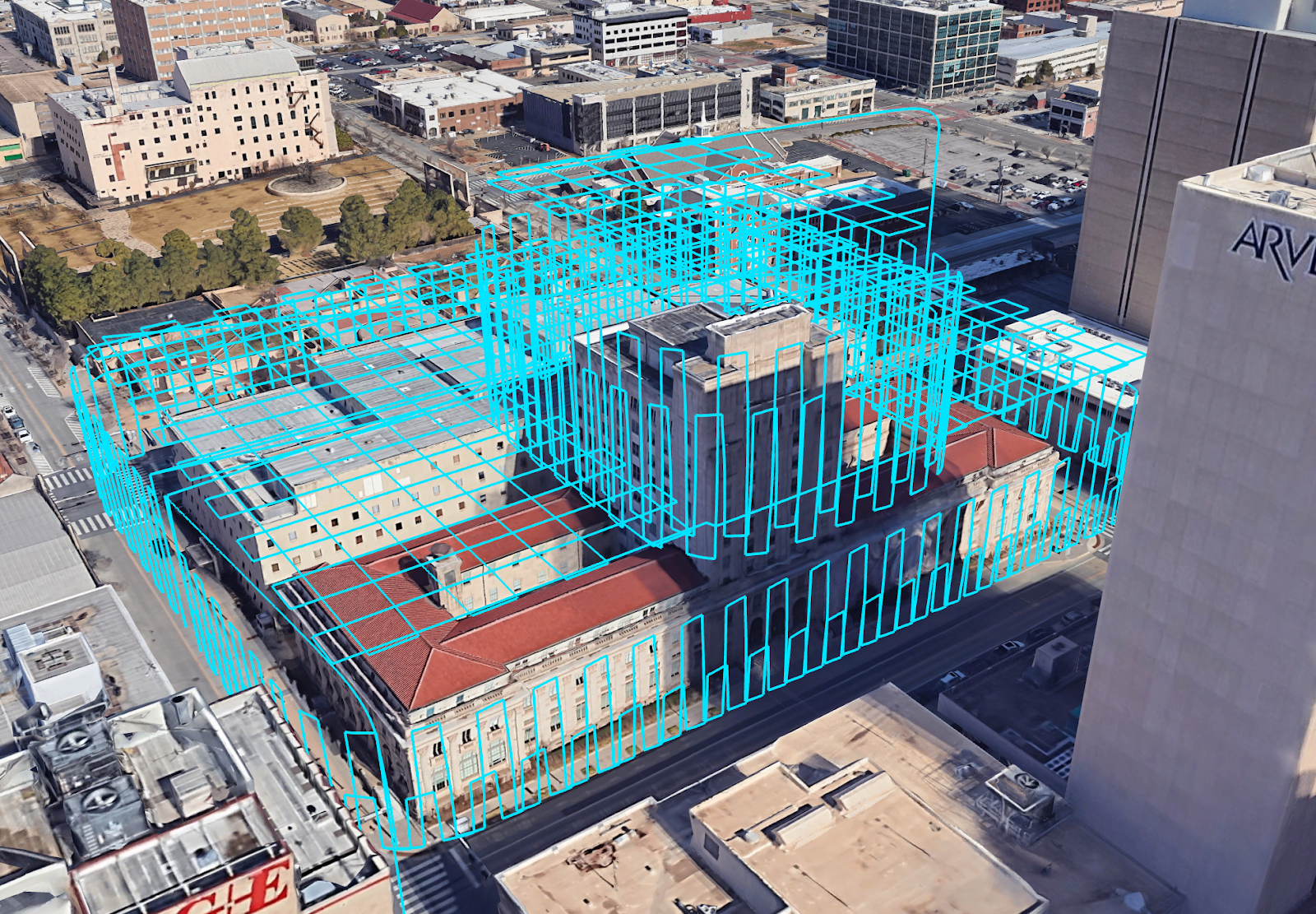
Aperçu de plan de mission 3D Dronelink 3D dans Google Earth
Des missions de cartographie verticale de façade et des missions de cartographie en grille de Dronelink, un logiciel de contrôle de vol compatible avec les drones DJI, ont été effectuées pour capturer les données de manière autonome afin de créer des jumeaux numériques de l’Oklahoma District Court House et du Federal Judicial Learning Center and Museum.
Le recours à un vol automatisé était essentiel pour permettre à Paper Airplane, une société de solutions de drones souvent engagée pour des projets d’inspection, d’évaluation et de maintenance prédictive, de mener à bien ce projet historique de commémoration et de restauration. La capacité à capturer efficacement et en toute sécurité des données de haute qualité a permis la production ultérieure de livrables tout aussi qualitatifs qui ont dépassé les attentes du client.

Pilote Paper Airplane dirigeant la mission depuis un toi
Planter le décor
Paper Airplane, une société spécialisée dans les services de drones, a été engagée pour créer des jumeaux numériques de l’Oklahoma District court House et du Federal Judicial Learning Center and Museum. L’objectif de ce projet était de préserver et de restaurer l’importance historique de ces bâtiments.
Ce site se trouve juste en face de l’endroit où a eu lieu l’attentat à la bombe d’Oklahoma City en 1995. L’explosion a endommagé 324 bâtiments dans un rayon de 16 pâtés de maisons. L’objectif était d’inspecter les deux bâtiments afin d’évaluer l’intégrité structurelle des zones endommagées et de planifier la maintenance préventive tout en immortalisant les évènements historiques ayant endommagé les bâtiments.
Contrairement aux jumelles et aux caméras au sol, qui offrent des informations limitées sur les dommages, leur emplacement exact et la surface du bâtiment, le modèle 3D jumeau numérique était la solution idéale pour toutes les parties prenantes impliquées. Le modèle 3D permet de superposer des images sous plusieurs angles de chaque point d’intérêt, ce qui facilite l’identification et la localisation des dommages.

Image modèle 3D avec plusieurs points d'intérêt
Les objectifs du projet étaient les suivants :
- Fonctionnement sûr des vols de drone pour la capture de tous les toits et façades.
- Traitement des images individuelles capturées dans une représentation 3D de haute qualité.
- Exportation du maillage 3D et du nuage de points des bâtiments.
- Partage des données avec le cabinet d’architectes gérant le projet.
- Facilitation de l’importation/la mise en œuvre des modèles à des fins d’inspection/d’atténuation et de mise en œuvre dans la BIM et les logiciels de modélisation.
- Solution de visualisation basée sur le cloud afin de faciliter l’accès au personnel ne disposant pas des ressources matérielles et lui permettre de visualiser le fichier natif.
- Mise à disposition d’un fichier de projet pour la corrélation des dommages avec leur emplacement sur la surface du bâtiment.
Considérations relatives à la capture de données pour les jumeaux numériques
Lors de la création d’un plan de production d’un jumeau numérique de haute qualité, nous devons comprendre certains facteurs clés afin de capturer les meilleures données possibles pour une utilisation dans un logiciel de traitement photogrammétrique. Examinons d’abord ces facteurs. Dans les sections suivantes, nous examinerons ensuite pourquoi Paper Airplane a choisi d’utiliser DJI et Dronelink.
Qualité d’image :
La qualité des images capturées est de la plus haute importance. Les caractéristiques clés d’une caméra qui permettent d’obtenir une image de haute qualité sont la taille du capteur, la qualité de l’obturateur et la résolution.
Un grand capteur permet d’augmenter la plage dynamique de l’image. Il permet de prendre des photos dans des zones sombres ou faiblement éclairées avec des éléments ensoleillés dans la même image. Ces conditions d’éclairage sont très courantes lors de la capture de données autour de grandes structures. Il est également important de disposer d’un obturateur mécanique de haute qualité pour limiter les distorsions ou les flous d’image, car un drone se déplace en permanence lors de la capture d’images. La stabilité de l’image est également cruciale pour réduire le flou de mouvement et faciliter la mise au point de la caméra, en particulier dans les zones sujettes à de fortes rafales de vent, telles que les zones fortement urbanisées.
Précision de l’image :
Lors de la création d’un modèle 3D, il peut être utile de comprendre l’emplacement de l’image pour améliorer la qualité du maillage de sortie et les temps de traitement. Cependant, dans les zones fortement urbanisées, la hauteur des bâtiments peut limiter la vue du ciel (et des satellites) et, à leur tour, dégrader la qualité du GPS. Les drones DJI Entreprise utilisent le dispositif Real Time Kinematics (RTK) pour minimiser les erreurs de positionnement dans les environnements complexes. Le récepteur RTK du drone peut référencer une station de base ou un fournisseur NTRIP pour une meilleure précision de positionnement. Pour en savoir plus sur la technologie RTK et la précision que confèrent les drones DJI Enterprise, cliquez sur ce lien.
Couverture de l’actif :
Chaque partie de l’actif doit être capturée sous plusieurs angles pour une garantir une reconstruction de haute qualité. Cela inclut la capture d’images NADIR du toit et de chaque façade, avec une superposition suffisante pour leur traitement. Les différents angles de caméra permettent de couvrir divers éléments, comme le dessous d’un balcon. Le maintien d’une bonne superposition des images horizontalement et verticalement peut constituer un défi lors de la capture d’une façade, en particulier si l’on considère que la distance d’échantillonnage, l’angle de la caméra et la taille du capteur de la caméra influent sur le modèle de vol nécessaire à cette tâche.
L’utilisation d’un logiciel de contrôle de vol est essentielle pour gérer tous ces paramètres de capture de données pour les vols de cartographie NADIR et les vols de cartographie verticale de façade. Des missions automatisées peuvent être créées pour certains modèles de vols tels que des colonnes verticales, des trajectoires horizontales superposées et des modèles de grille ou de hachures dans une limite définie à l’aide de valeurs de superposition et d’angles de caméra prédéfinis.
Résolution spatiale/distance d’échantillonnage :
La résolution est un facteur important qui affecte la qualité de la reconstruction. Une résolution plus élevée permet d’obtenir plus de détails sur l’objet et une meilleure définition des caractéristiques plus petites sur le modèle 3D. La résolution d’une image dépend à la fois des caractéristiques techniques de la caméra et de la distance par rapport à l’objet pendant l’imagerie. Pour la cartographie des terres, on utilise souvent le terme de distance d’échantillonnage au sol (GSD). Dans le cas d’une façade de bâtiment, on parle de distance d’échantillonnage. Elle fait référence aux dimensions d’un seul pixel dans une image, telles que mesurées sur l’actif (par exemple, 0,10 po/px | 0,24 cm/px).
La résolution et la couverture de l’actif sont étroitement interconnectées. La détermination de la distance d’échantillonnage souhaitée et de la résolution nécessaires permet d’établir la distance à laquelle le drone doit se trouver par rapport à la surface de l’actif. Cela détermine à son tour le modèle de vol requis pour maintenir les superpositions avant et latérales afin de garantir la couverture de l’actif.
Maintenant que nous comprenons certains facteurs clés de la création de jumeaux numériques, parlons du matériel et des logiciels spécifiques qui peuvent répondre à ces exigences.
Choix du matériel
Le DJI Mavic 3 Enterprise est un excellent choix pour une solution matérielle évolutive. Avec son grand capteur de 4/3” qui capture des images de 20 MP, ce drone dispose d’une plage dynamique incroyable pour vous aider à capturer les meilleures images possibles. Un grand capteur associé à un obturateur mécanique se déclenchant en 0,7 seconde fait de M3E le meilleur de sa catégorie. Cet obturateur mécanique plus rapide permet un vol plus rapide sans nuire à la qualité de l’image, ce qui peut vous faire gagner du temps sur le site. Son format compact facilite son utilisation et il est doté du système de caméra adapté à toutes les opérations de jumeaux numériques. En outre, la longue autonomie de la batterie (jusqu’à 45 minutes) réduit la nécessité de changer plusieurs fois de batterie au cours d’une mission et limite le nombre total de batteries nécessaires sur le terrain.

Comparé à un drone grand public (Mavic 2 Pro) avec un intervalomètre de 2 secondes, M3E parcourt le même site plus rapidement avec des résultats de meilleure qualité. Mavic 3 Enterprise peut également capturer des données précises au pouce près tout en volant en toute sécurité avec un récepteur RTK interchangeable.
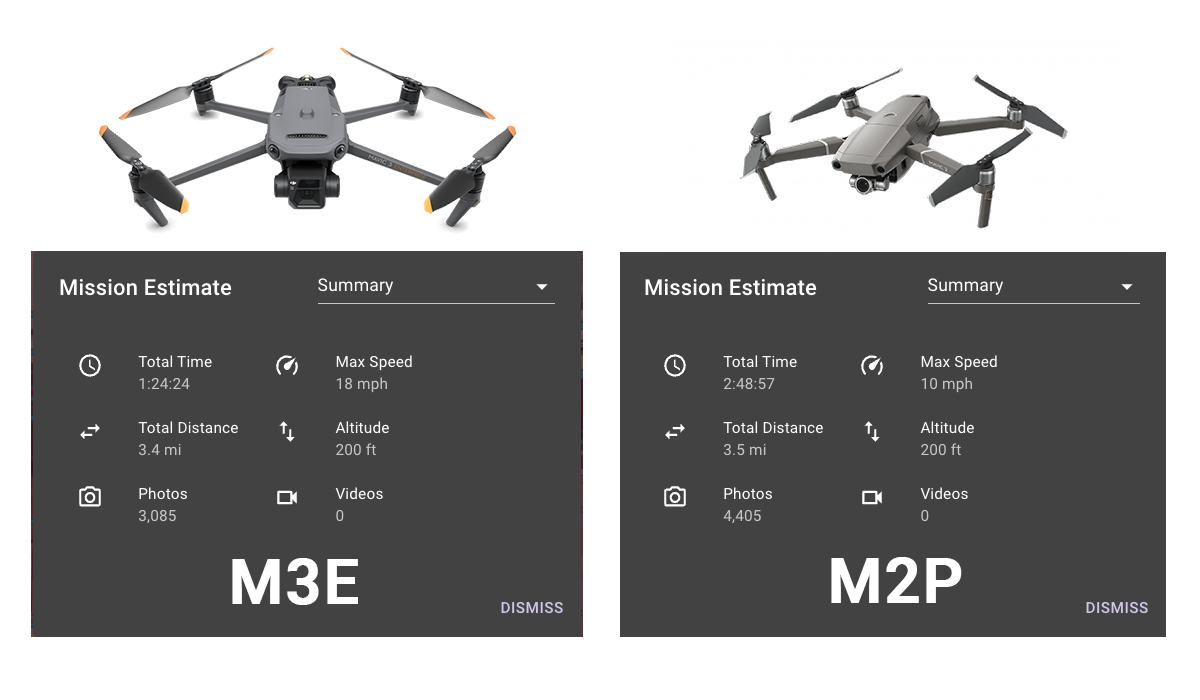
Les estimations de mission de Dronelink montrent que M3E capture le même site 2 fois plus vite que M2P
Automatisation de la capture de données avec un logiciel de contrôle de vol
Sans l’utilisation d’outils de vol automatisés, il est difficile de couvrir l’ensemble des actifs avec une haute résolution tout en garantissant la sécurité des opérations. Dans le cadre de ce projet, Paper Airplane a utilisé le logiciel Dronelink, qui offre une série d’outils et de processus de contrôle de vol pour créer des plans de mission et les exécuter de manière autonome. La solution Dronelink peut être utilisée pour les missions de façade pour effectuer une cartographie verticale, ainsi que pour les missions de cartographie afin de capturer les toits.
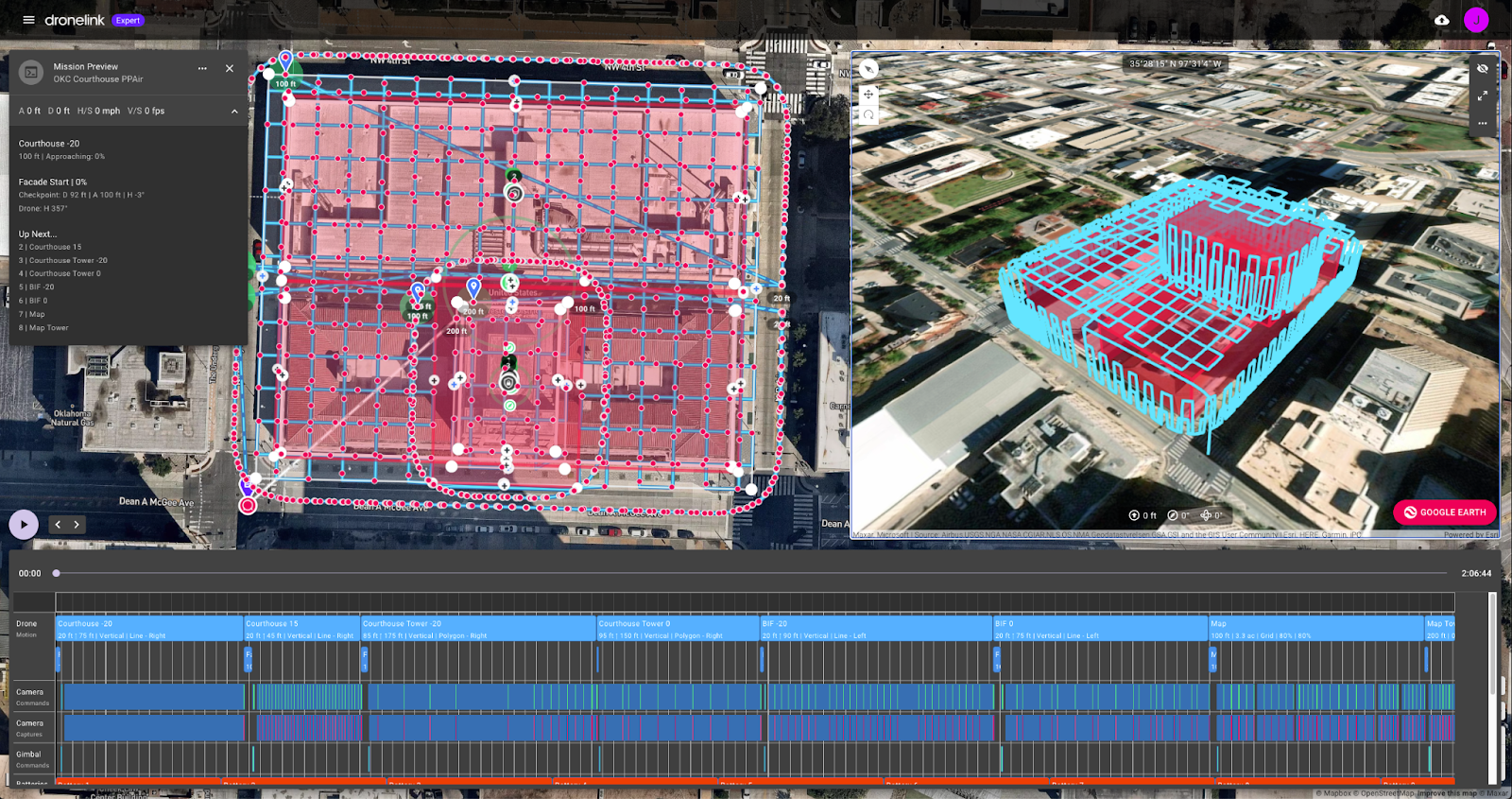
Aperçu de la mission Dronelink présentant des plans de mission combinés de types façade et carte
Dans Dronelink, une mission de façade peut être facilement créée à l’aide de quelques entrées clés. Il s’agit notamment des éléments suivants :
- Limite de la façade (côtés gauche et droit, hauteur et altitude de sécurité minimum).
- Superposition verticale et horizontale.
- Distance cible à partir de la surface de l’actif et du capteur de caméra utilisé.
- Angle de la caméra.
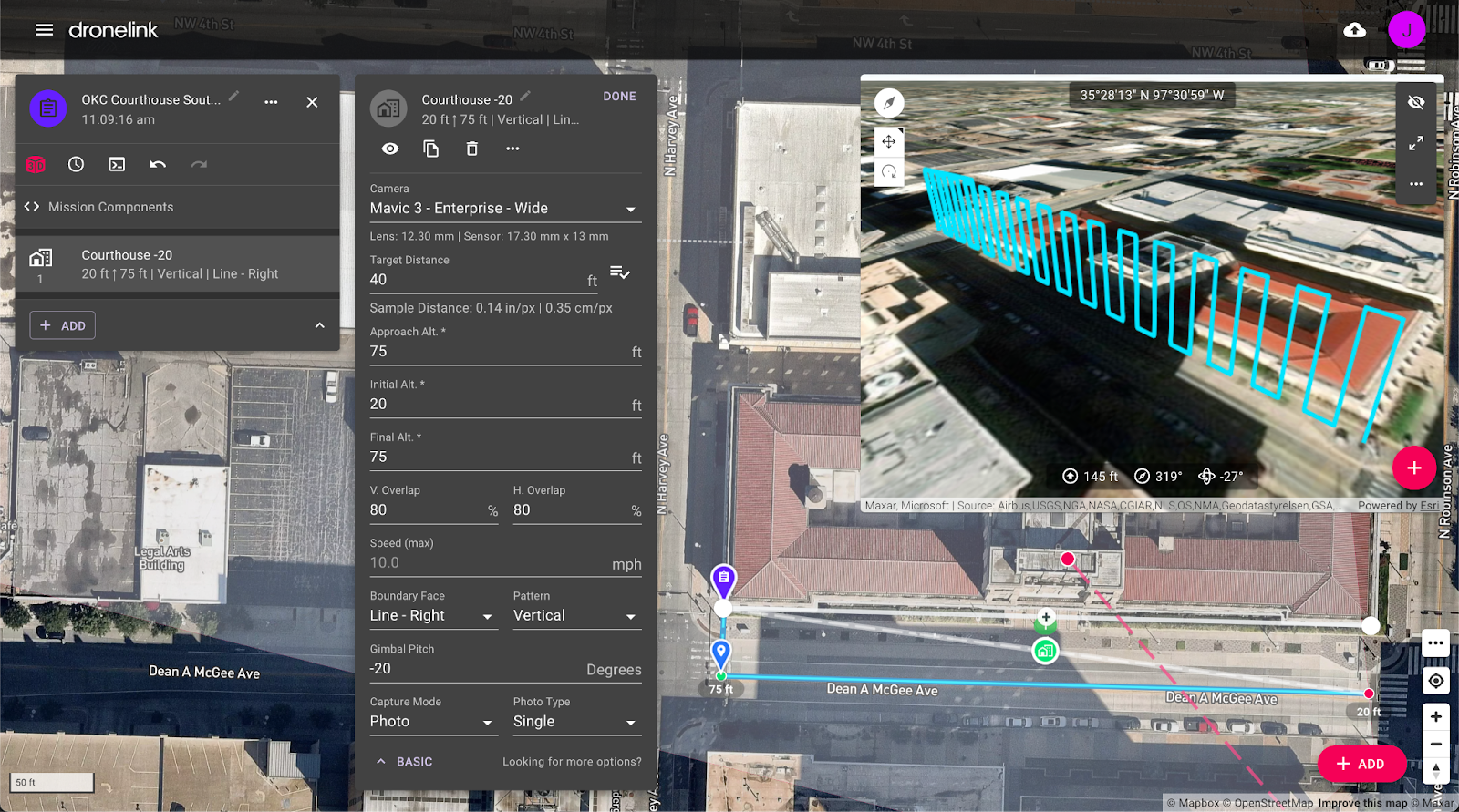
Planificateur de mission Dronelink et aperçu 3D montrant une mission de façade unique avec des colonnes verticales ainsi que les paramètres de configuration
Une mission de façade peut être créée à l’aide de deux processus différents :
- Planification préalable de missions sur le Web ou l’application mobile.
- Missions à la volée générées sur le terrain à l’aide du drone.
La planification préalable des missions de façade nécessite la création du plan de mission en amont, à l’aide du planificateur de mission sur un ordinateur portable ou une application mobile. Pour en savoir plus, cliquez ici. Une fois qu’une mission est planifiée, les fonctions de géo-rectification peuvent aligner la mission sur le terrain en fonction d’un point de référence connu, tel que le coin d’un bâtiment. Des zones interdites peuvent également être ajoutées pour créer des zones d’exclusion aérienne. Ces deux fonctions sont utiles pour accroître la précision et la sécurité.
Les missions de façade à la volée permettent à un pilote de générer la mission sur le terrain, en utilisant la position du drone pour notamment marquer visuellement la zone de limite de vol et définir les superpositions de caméra. Une série d’instructions étape par étape dans l’application mobile invite le pilote à marquer les entrées clés qui généreront la mission (voir ci-dessous). Une fois générée, la mission s’aligne sur l’actif et exécute une façade de bâtiment à la fois. Cette fonction permet aux pilotes de modifier leurs plans pour tenir compte des contraintes environnementales telles que la vitesse, la superposition, les restrictions de hauteur minimum et d’autres points spécifiques.
Pour ce site, Paper Airplane a choisi d’exécuter des missions de façade à la volée pour capturer chaque façade à l’aide de deux angles de caméra différents et de missions de cartographie pré-planifiées pour les toits.
Après avoir lancé la mission adaptative de façade à la volée, le pilote a fait voler le drone manuellement pour marquer les entrées clés suivantes nécessaires, comme illustré sur l’image ci-dessous.
- Étape 1 : Coin droit du bâtiment
- Étape 2 : Coin gauche
- Étape 3 : Bord supérieur
- Étape 4 : Altitude de sécurité minimale, distance cible et inclinaison de la nacelle
- Étapes supplémentaires : modèle et superpositions (non illustrés)
Étapes pour créer une mission de façade à la volée
Une fois toutes les entrées requises fournies, la mission est générée et peut être prévisualisée en 3D avant le vol. Ensuite, le pilote sélectionne Démarrer et Dronelink commence à piloter la mission.
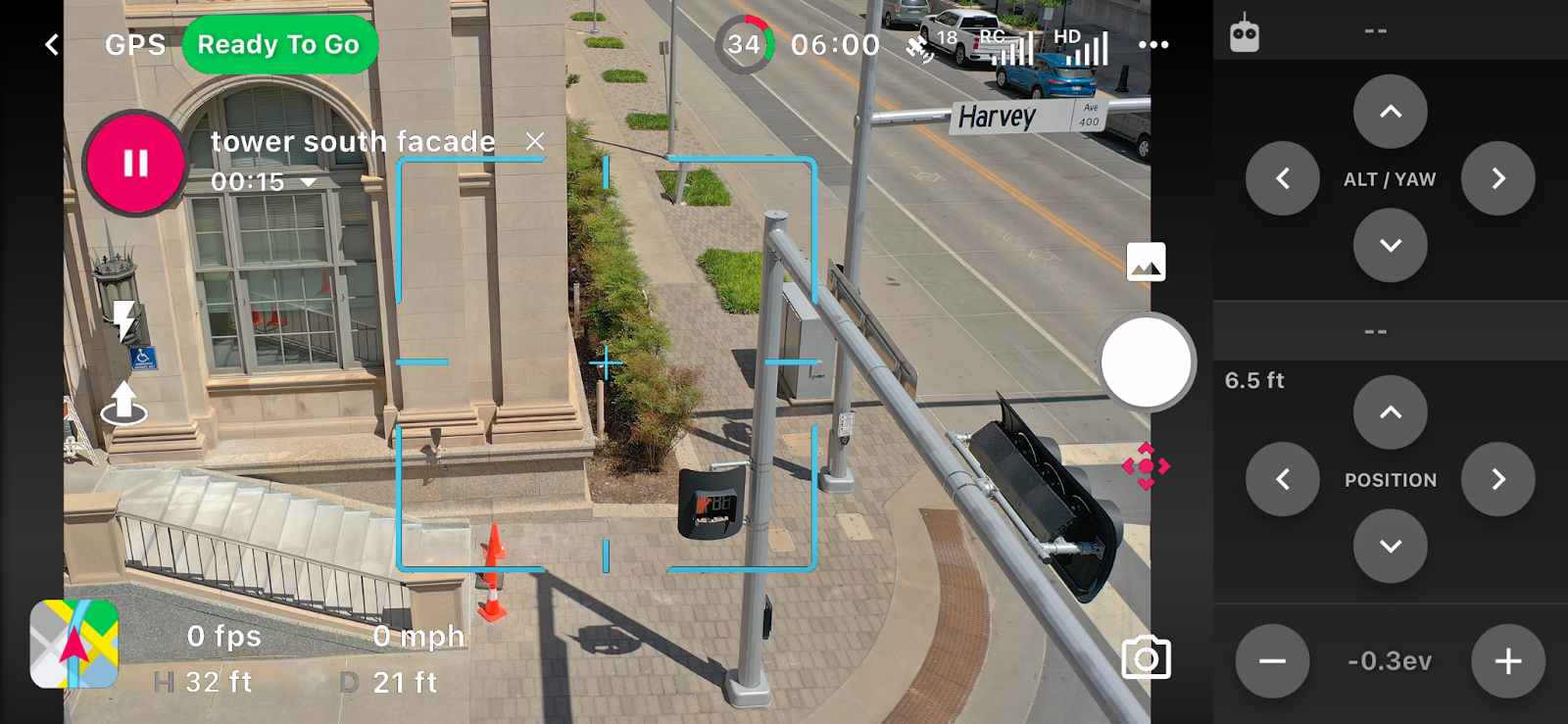
Vol de façade autonome avec panneau de décalage du drone
Au fur et à mesure de l’exécution de la mission, le pilote peut se concentrer sur l'inspection du drone et de son environnement pour garantir la sécurité des opérations. Le panneau de décalage du drone sur la droite permet au pilote d’effectuer des entrées en temps réel pendant la capture, par exemple des ajustements mineurs de l’altitude lorsqu’il se rapproche d’un obstacle. À tout moment, le pilote peut interrompre la mission et reprendre le contrôle. La dernière position est enregistrée, que ce soit après une pause manuelle ou pour un remplacement de batterie, et le pilote peut reprendre la mission à partir de l’endroit où elle s’est arrêtée, en maintenant la continuité des données et les superpositions pour le post-traitement.
Cliquez ici pour regarder une vidéo complète de présentation de la mission de façade à la volée.
Pour ce projet, Paper Airplane a effectué 12 missions de façades adaptatives à la volée et deux missions de cartographie, afin d’assurer une couverture complète. Pour créer le jumeau numérique requis, chaque façade a été survolée deux fois, avec un angle de caméra de 0 degré et de -20 degrés. Chaque mission de façade a été effectuée à l’aide d’un modèle de vol vertical avec une superposition verticale de 80 % et horizontale de 80 %. Une distance cible de 40 pieds a été utilisée pour obtenir une distance d’échantillonnage de 0,14 po/px | 0,35 cm/px.
Pour des raisons de sécurité opérationnelle, un modèle de vol vertical a été sélectionné au lieu d’un modèle de vol horizontal. En raison des bâtiments environnants et de l’environnement urbain, les colonnes verticales ont permis au pilote de se tenir sous le drone lorsqu’il montait ou descendait dans une colonne, garantissant ainsi que personne d’autre ne puisse se trouver directement sous celui-ci.
Traitement et analyse des données
Une fois les données capturées sur site, il faut les post-traiter. DJI Terra est un moteur de traitement localisé abordable et capable de générer des modèles 3D de haute qualité. Le processus de génération d’un modèle 3D avec DJI Terra est disponible ici.
Lors du traitement des données, assurez-vous d’inclure tous les points de contrôle au sol (GCP) ayant pu être utilisés. Les GCP ne sont pas nécessaires pour créer des modèles 3D, mais peuvent aider à obtenir une précision absolue et à générer des points de liaison. Pour en savoir plus sur les GCP, cliquez ici. Pendant le traitement, des points de liaison manuels (MTP) peuvent également être utilisés pour créer un maillage 3D plus dense pendant le traitement.
Avec les données traitées dans un modèle 3D, il est possible pour les utilisateurs finaux (dans ce cas, le maître d’œuvre et les architectes) d’examiner les images et d’identifier la position exacte de dommages éventuels ou de zones d’intérêt sur le modèle 3D. Cette fonctionnalité est extrêmement utile pour fournir un contexte dans lequel se trouvent des zones nécessitant une attention particulière. Les outils de mesure peuvent déterminer l’emplacement exact et la taille de la zone endommagée et aider à planifier les travaux d’entretien.



Résultats finaux de l’image modèle 3D
Conclusion
La création de jumeaux numériques d’actifs physiques à l’aide de drones et de la photogrammétrie change la façon dont les entreprises de tous les secteurs travaillent. La mise à disposition en ligne de jumeaux numériques aux principales parties prenantes de ces entreprises leur permet d’économiser un nombre incalculable d’heures, et donc d’être plus efficaces et d’optimiser leurs propres processus internes.
L’association des drones DJI Enterprise et du logiciel d’automatisation des vols de Dronelink a permis à Paper Airplane de mener à bien ce projet complexe parmi bien d’autres, avec des résultats exceptionnels. Cette société a ainsi rejoint d’autres acteurs majeurs qui portent la vague de la transformation numérique dans l’ensemble des secteurs d’activité.

À propos de Dronelink
Dronelink est un logiciel de contrôle de vol de drone proposant des missions automatisées, des processus et des outils de vol pour les drones DJI les plus performants. La solution est prise en charge sur le Web, les appareils mobiles et les radiocommandes. Les pilotes peuvent piloter des missions de cartographie, de waypoints, d’orbite, de panographie, de cartographie verticale ou d’inspection, ou utiliser des modes de vol tels que l’orbite, le suivi ou la mise au point. Enchaînez plusieurs missions, automatisez chaque détail, bénéficiez d’aperçus en 3D et optimisez la précision et l’exactitude de vos drones. Pour en savoir plus, rendez-vous sur dronelink.com.
À propos de Paper Airplane
Paper Airplane est un fournisseur de services d’aéronefs sans pilote de bout en bout qui propose des analyses de données par le biais d’opérations d’arpentage, d’inspections, de maintenance prédictive et d’évaluations. Les produits sont adaptés aux besoins individuels du client afin de créer des livrables uniques, puissants et faciles à comprendre. Paper Airplane propose des services d’arpentage, d’inspection de l’enveloppe des bâtiments, d’inspection des services collectifs/emprises, de détection du méthane, d’inspection des eaux pluviales/de cartographie BMP, etc. Pour en savoir plus, rendez-vous sur www.pprair.com.
Pour en savoir plus sur d'autres études de cas concernant les jumeaux numériques, cliquez ici.


-1.png?width=300&name=M400%20(1)-1.png)

