DJI Enterprise offre un'ampia gamma di prodotti per i professionisti del settore geospaziale. Di seguito sono riportate alcune domande frequenti e le relative risposte ai seguenti prodotti:
- Mavic 3 Enterprise
- Matrice M350/M300 RTK + Zenmuse L1
- Matrice M350/M300 RTK + Zenmuse P1
- DJI Terra
Il presente documento fornisce le risposte alle domande frequenti, nonché informazioni dettagliate e specifiche per ciascun prodotto. Inoltre, offre suggerimenti e raccomandazioni per elaborare i dati e ottenere risultati accurati.
Soluzioni geospaziali
Quali sono i pro e i contro del confronto tra Mavic 3 Enterprise, Zenmuse L1 e Zenmuse P1?
| Prodotto |
Pros |
Cons |
|
M350 RTK + Zenmuse L1 |
- Elevata adattabilità: non influenzato dalle condizioni di illuminazione e in grado di effettuare la modellazione in ambienti con texture bassa. - I risultati possono essere utilizzati per estrarre un modello digitale di elevazione (DEM) con penetrazione nella vegetazione. - È in grado di acquisire facilmente strutture sottili dall'output delle nuvole di punti, come le linee di trasmissione. • Elevata efficienza di modellazione: un volo può coprire un sito di circa 200 ettari[1]. |
- La precisione dipende relativamente dallo stato del POS iniziale. - È necessaria un'ulteriore post-elaborazione dei dati delle nuvole di punti utilizzando software di terze parti per fornire un prodotto finale di nuvole di punti classificato per l'utilizzo. |
|
M350 RTK + Zenmuse P1 |
- Supporta più modalità di operazione: Ortofoto 2D, obliquo 3D, fotografia a campo stretto, ecc. - Elevata efficienza operativa: un volo può raccogliere circa 300 ettari di ortofoto[2]. - Alta precisione: È in grado di soddisfare la precisione delle misurazioni catastali 1:500 senza applicare GCP. - Numero elevato di pixel: fino a 45 milioni di pixel con fotocamera full-frame. |
- Non è possibile risolvere il problema della modellazione notturna o dell'area di modellazione con texture bassa. - Poiché le soluzioni di fotogrammetria non possono penetrare nella vegetazione come LiDAR, i modelli risultanti sono limitati ai risultati DSM e non possono produrre risultati DEM. - Il processo di fotogrammetria richiede una potenza di elaborazione GPU significativamente maggiore per eseguire l'aerotriangolazione e generare modelli da immagini RAW. Al contrario, per venire utilizzati, basta che i dati LiDAR vengano convertiti in un formato universale. Pertanto, l'efficienza delle fasi di acquisizione e elaborazione dei dati nella soluzione di fotogrammetria sarebbe inferiore rispetto alla soluzione LiDAR |
|
Mavic 3 Enterprise |
- Bassa soglia d'ingresso, estremamente conveniente; - Piccolo, portatile, facile da usare. - Rispetto a Phantom 4 Pro o Phantom 4 RTK, Mavic 3 Enterprise è più leggero e portatile, con migliori funzionalità di evitamento degli ostacoli, maggiore durata della batteria e specifiche della fotocamera superiori. |
- Efficienza di funzionamento relativamente bassa rispetto a P1. - Numero di pixel della fotocamera inferiore rispetto a P1. - Non adatto per operazioni su larga scala. - Gli aspetti negativi di Zenmuse P1 sono condivisi anche da Mavic 3 Enterprise. |
Nota:
[1] Velocità del volo di 36 km/h, altitudine di volo di 100 m, sovrapposizione laterale del 20%, tempo di raccolta dati di 30 minuti, densità della nuvola di punti superiore a 200 punti/m²*.
[2] Utilizzando un obiettivo da 35 mm, un GSD da 3 cm, impostazioni delle missioni di volo: sovrapposizione della direzione del 75%, sovrapposizione laterale del 55%.
Quando si confrontano le funzionalità di fotogrammetria tra le fotocamere:
|
Mavic 3 Enterprise con modulo RTK (fotocamera grandangolare) |
Matrice M350 RTK + Zenmuse P1 |
Matrice M350 RTK + Zenmuse L1 |
|
|
Dimensioni |
Dimensioni ridotte |
Dimensioni medie |
Dimensioni medie |
|
Precisione di rilevamento |
Sì |
Sì |
Sì |
|
Supporto RTK/PPK |
Sì |
Sì |
Sì |
|
GSD (cm) |
A(m)/36,5 |
24 mm A(m)/5535 mm: A(m)/8050 mm: A(m)/120 |
A(m)/36,5 |
|
Dimensioni sensore |
4/3"5280 × 3956 (4:3) |
Full-frame (35,9×24 mm)8192 × 5460 (3:2) |
1"5472 × 3648 (3:2) |
|
Risoluzione immagini |
20 MP |
45 MP |
20 MP |
|
Dimensioni pixel |
3,3 μm |
4,4 μm |
2,4 μm |
|
Opzione obiettivo |
FOV equivalente 12 mm/24 mm 84.0° |
DL 24mm; FOV 84.0° DL 35mm; FOV 63.5° DL 50mm; FOV 46.8° |
FOV equivalente 8,8 mm/24 mm 84.0° |
|
Otturatore meccanico |
Sì (1/2000-8s) |
Sì (1/2000-1s) |
Sì (1/2000-8s) |
|
Intervallo minimo foto |
0,7s |
0,7s |
2,5s |
|
Autonomia di volo |
Fino a 42 minuti (con modulo RTK) |
Fino a 44 minuti |
Fino a 42 minuti |
|
Massima resistenza al vento |
12m/s |
12m/s |
12m/s |
| Requisiti di memoria |
Grado di velocità livello 3 microSD UHS-I o superiore Capacità massima: 512 GB |
SD Classificazione UHS-i o superiore Capacità massima: 512 GB |
Micro SD Grado di velocità livello 3 UHS-I o superiore Capacità massima: 256 GB |
|
Supporto Smart Oblique |
Sì |
Sì |
No |
|
Terrain Follow in tempo reale |
Sì |
No |
No |
|
Supporto SDK e app di terze parti |
Sì |
Sì |
Sì |
Come si accede ai parametri di distorsione dell'obiettivo?
Per accedere manualmente ai parametri di distorsione dell'obiettivo, apri l'immagine in formato ".jpg" come file di testo e cerca la parola chiave "DewarpData" nel campo dati XMP. Il formato del testo deve essere simile a: drone-dji: DewarpData = "2023-03-13;3663.4800000000…"
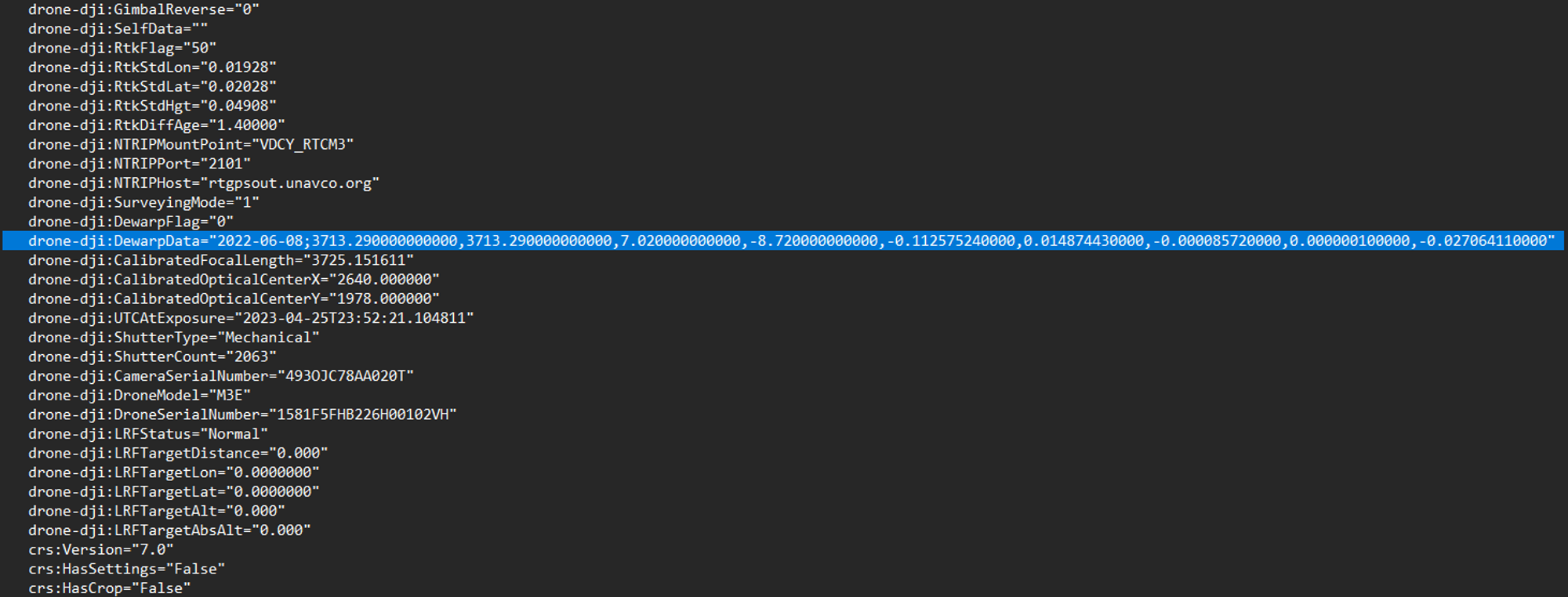
I numeri in sequenza corrispondono a: "calibrate_date;fx,fy,cx,cy,k1,k2,p1,p2,k3" "fx,fy" rappresenta la lunghezza focale nel pixel "cx,cy" rappresenta il centro ottico espresso in coordinate pixel (punto di origine come centro dell'immagine) "k1,k2, k3" rappresenta la distorsione radiale "p1,p2" rappresenta la distorsione tangenziale.
Per ulteriori informazioni, fai riferimento alla seguente guida relativa alla calibrazione della fotocamera con OpenCV.
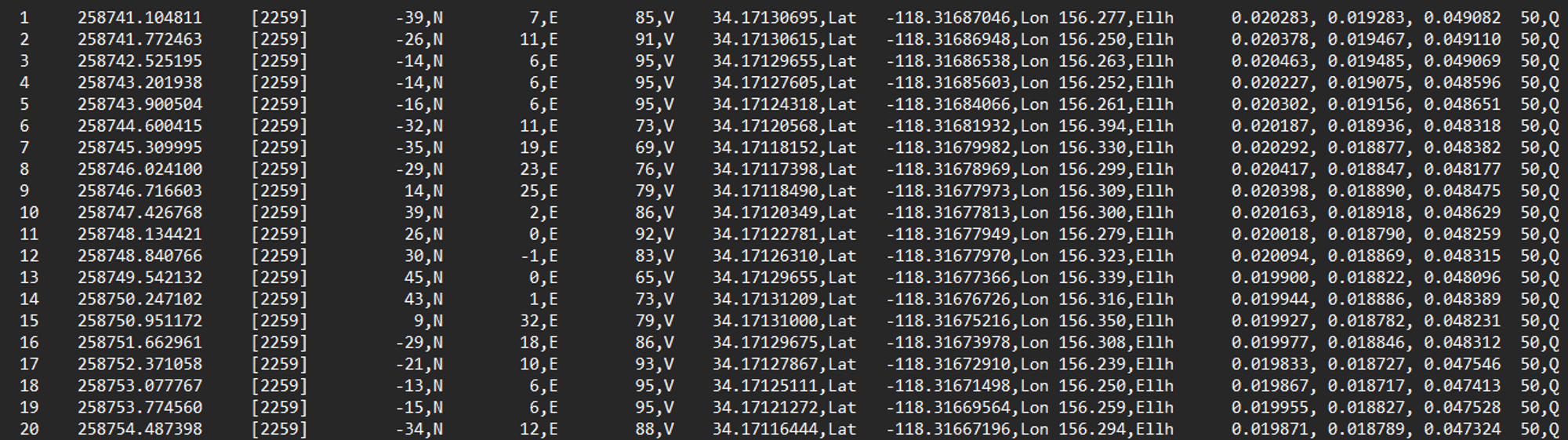
Cosa rappresenta ciascuna colonna di dati all'interno del file XXX_Timestamp.MRK?
Colonna 1: Numero della foto corrispondente
Colonna 2: Tempo di esposizione del GPS, secondi della settimana (ora UTC)
Colonna 3: Tempo di esposizione della settimana GPS (ora UTC)
Colonna 4: Valore di compensazione di fase tra l'antenna nord (N) al centro del sensore CMOS. (Unità: Millimetri)
Colonna 5: Valore di compensazione di fase tra l'antenna est (E) al centro del sensore CMOS. (Unità: Millimetri)
Colonna 6: Valore di compensazione di fase tra l'antenna direzionale verso l'alto e verso il basso (verso il basso come positiva) (V) al centro del sensore CMOS. (Unità: Millimetri)
Colonna 7: Latitudine in tempo reale (colonna 8) e longitudine (colonna 8) del centro CMOS ottenute al tempo di esposizione, in gradi decimali.
Colonna 9: Altezza in tempo reale del centro CMOS ottenuta al tempo di esposizione, in metri. Questa altezza è l'altezza geodetica (comunemente nota come altezza ellissoide), relativa alla superficie ellissoide di riferimento predefinita (gli utenti possono definire il proprio modello ellissoide, il valore predefinito è WGS84; gli utenti possono impostarlo su altri ellissoidi accedendo a diversi sistemi/benchmark della stazione CORS, come CG2000). Tieni presente che questa altezza non si basa sul benchmark di altitudine (altezza ortometrica) EGM96/2008 comunemente utilizzato a livello mondiale.
Colonne da 10 a 12: La deviazione standard del posizionamento determina rispettivamente le direzioni nord, est e verso l'alto, indicando la precisione relativa del posizionamento nelle tre direzioni. L'unità di misura sono i metri.
Colonna 13: Stato RTK, 0-nessun posizionamento, modalità di posizionamento a 16 punti singoli, soluzione variabile 34-RTK, soluzione fissa 50-RTK. Se il contrassegno di una foto non è 50, non è consigliabile utilizzare questa foto direttamente per la mappatura.
Zenmuse L1
È possibile utilizzare i punti di controllo terra (GCP) per elaborare i dati LiDAR in DJI Terra?
Terra non supporta l'importazione GCP per i dati LiDAR. Tuttavia, per applicare i GCP ai dati L1 LiDAR, si consiglia di utilizzare software di terze parti come TerraSolid UAV.
Qual è il formato di output dei dati di Zenmuse L1 oltre a Las?
PNTS, PLY, PCD, S3MB.
È possibile elaborare i dati RAW L1 senza una connessione RTK? I dati RAWi di Zenmuse L1 possono essere elaborati durante un normale volo GPS?
Sì, è possibile elaborare i dati RAW L1 senza una connessione RTK. Tuttavia, è necessario aggiungere un file di osservazione della stazione base (file Rinex, RTCM, OEM o UBX) alla cartella dati RAW L1 insieme al resto dei dati RAW per elaborare e generare correttamente il file nuvola di punti all'interno di DJI Terra. Questo processo è denominato PPK (Post-Process Kinematic, cinematica di post-elaborazione).
Per ulteriori informazioni su questo processo, fai riferimento alla guida operativa, in particolare a pagina 11: https://dl.djicdn.com/downloads/Zenmuse_L1/20230420/DJI_L1_Operation_Guidebook_V1.2.pdf
È possibile unire i dati di più voli con Zenmsue L1 in una singola nuvola di punti in DJI Terra?
Sì, è possibile importare più cartelle di dati RAW acquisite dai voli L1; seleziona l'opzione Output combinato e la nuvola di punti di output in un file LAS utilizzando Terra.
Qual è la differenza tra ritorno singolo, doppio e triplo e quali sono le best practice per utilizzarli?
Modalità ritorno/eco: indica che il LiDAR può ricevere più ritorni dopo l'emissione di un fascio di luce laser.
La modalità di ritorno singolo significa che viene fatto scattare un punto laser e il LiDAR può ricevere al massimo un ritorno. La modalità di ritorno doppio significa che viene fatto scattare un punto laser e il LiDAR può ricevere al massimo due ritorni. La modalità di ritorno triplo consente al LiDAR di ricevere al massimo tre ritorni per ciascun punto laser.
Se sono necessarie solo informazioni sulla superficie o DSM, è sufficiente la modalità di ritorno singolo. Tuttavia, in scenari come il rilevamento forestale che richiedono la penetrazione della vegetazione e i dati DEM, è necessaria la modalità di ritorno doppia o tripla.
Can Zenmuse L1 be mounted on the dual downward gimbal or upward gimbal of M350/M300 RTK?È possibile montare Zenmuse L1 sul doppio innesto inferiore o sulla fotocamera montata verso l'alto di RTK M350/M300?
No. Zenmuse L1 può essere montato solo sul singolo innesto inferiore di M300/M350 RTK. Se utilizzato sul doppio innesto inferiore o sulla fotocamera montata verso l’alto, la posizione dello stabilizzatore sarebbe diversa e la posizione predefinita, con ripercussioni sulla precisione.
Zenmuse P1
L'obiettivo Zenmuse X7 funziona su Zenmuse P1?
Solo le versioni da 24 mm, 35 mm e 50 mm. Il modello da 16 mm non funziona con P1 a causa delle dimensioni del sensore.
La precisione soddisferà i requisiti della precisione di rilevamento dopo una corretta calibrazione. È possibile utilizzare il software DJI Terra per calibrare e sovrascrivere i nuovi parametri dell'obiettivo per la prima volta, come descritto di seguito.
Ho modificato un obiettivo Zenmuse P1 e ora tutti i parametri di distorsione dell'obiettivo della fotocamera sono obsoleti. Come posso ricalibrare i parametri intrinseci con un nuovo obiettivo?
Per verificare se l'obiettivo P1 è calibrato correttamente, apri prima la foto P1.jpg come file di testo e cerca il campo dati XMP "DewarpData". Se questo campo non è elencato, l'obiettivo non è stato calibrato correttamente. Per ricalibrare i parametri di distorsione dell'obiettivo segui la procedura riportata qui sotto:
- Raccogli i dati di calibrazione
- Si consiglia di eseguire la calibrazione in aree con elevate differenze di altitudine, come edifici o colline.
- Utilizza Smart Oblique Capture o Oblique Mission (cinque percorsi) per pianificare la missione.
- Requisiti dei parametri: le immagini raccolte devono essere superiori a 100, il tasso di sovrapposizione frontale non deve essere inferiore all'80% e la sovrapposizione laterale non deve essere inferiore al 70%, l'immagine obliqua rappresenta non meno di 2/3. (Nessun limite per l'altitudine di volo)
- Attiva RTK e decolla dopo RTK FIX
- Modellazione: utilizza DJI Terra v2.3.1 e versioni successive per creare una nuova missione di ricostruzione 3D e avviare la modellazione
- Calibrazione
- Al termine della modellazione, apri la cartella, individua il file sfm_report.json nella directory AT-report e copialo sulla scheda SD della fotocamera;
- Inserisci la scheda SD nella fotocamera P1, connettiti all'aeromobile e accendi l'alimentazione. Quindi, la videocamera scriverà automaticamente i parametri interni dopo la calibrazione.
- Scatta una foto, aprirla con Notepad e cerca XMP. Se trovi DewarpData, significa che la calibrazione dei parametri interni della videocamera è stata eseguita correttamente.
È possibile montare Zenmuse P1 sul doppio innesto inferiore o sulla fotocamera montata verso l'alto di RTK M350/M300?
No. Zenmuse P1 può essere montato solo sul singolo innesto inferiore di M300/M350 RTK. Se utilizzato sul doppio innesto inferiore o sulla fotocamera montata verso l’alto, la posizione dello stabilizzatore sarebbe diversa e la posizione predefinita, con ripercussioni sulla precisione.
DJI Terra
Esiste un software di elaborazione della fotogrammetria in grado di unire e convertire le immagini dei droni in una mappa 2D o in un modello 3D?
Sì, è possibile utilizzare il software DJI Terra a tale scopo. DJI Terra è in grado di produrre modelli di superficie digitali (DSM) e una mappa di ortofoto digitale (TDOM) in formato geotiff e modelli di mesh 3D o nuvole di punti.
Quale software si consiglia per elaborare le immagini in una mappa ortofoto e produrre le superfici digitali?
Si consiglia di utilizzare DJI Terra per l'elaborazione offline o un software di terze parti adatto alle proprie esigenze.
Cosa si deve verificare prima di elaborare le foto dei droni in DJI Terra?
Nelle impostazioni della fotocamera, assicurati che l'opzione "Otturatore meccanico" sia attivata e che l'opzione "Correzione distorsione" sia disattivata prima del volo.
Se utilizzi PPK, assicurati che i dati di posizione dell'immagine siano corretti. Per RTK, non è necessario fare altro con le foto.
Quali ulteriori modifiche di elaborazione possono essere applicate ai dati di immagine del drone importati all'interno di Terra?
Durante l'elaborazione con Terra, non sono disponibili impostazioni per regolare la concentrazione del colore, l'esposizione e altre proprietà. Gli utenti possono modificare solo i dati POS dell'immagine, che includono i sistemi di coordinate e gli angoli di Eulero. Tuttavia, DJI Terra fornisce funzionalità aggiuntive, come la riduzione della foschia, la rifinitura della superficie dell'acqua e l'uniformità della luce, per garantire la qualità dell'output di ricostruzione.
Durante il volo come è possibile ridurre al minimo la sfocatura delle immagini acquisite dai droni?
Si consiglia di impostare la velocità dell'otturatore a una velocità superiore a 1/500 s, attivare l'otturatore meccanico, impostare l'ISO su automatico e regolare l'apertura in modo corrispondente.
Is the GPS/IMU info attached to the photo metadata field?Le informazioni GPS/IMU sono allegate al campo dei metadati delle foto?
Sì, puoi anche consultare la pagina 22-23 del manuale P1 per ulteriori informazioni sul campo dei metadati: Zenmuse_P1 _User Manual_EN_v1.2_3.pdf (djicdn.com)
I dati LiDAR elaborati in DJI Terra possono essere calibrati/classificati?I dati della traiettoria Zenmsure L1 sono in un file separato dalla nuvola di punti LAS?
Nessuna classificazione diversa da terra. Terra dispone inoltre di funzioni di base per ridurre il rumore, assottigliando la nuvola di punti.
I dati della traiettoria Zenmsure L1 sono in un file separato dalla nuvola di punti LAS?Anche il sensore Zenmuse L1 LiDAR è dotato di una fotocamera RGB, i dati di output sono una nuvola di punti a colori?
Sì, viene generato in formato "sbet.out" nella cartella dei risultati del progetto Terra.
Anche il sensore Zenmuse L1 LiDAR è dotato di una fotocamera RGB, i dati di output sono una nuvola di punti a colori?
Le foto possono essere acquisite contemporaneamente ai dati RAW della nuvola di punti. Queste foto possono essere utilizzate per l'elaborazione della fotogrammetria o la colorazione delle nuvole di punti.
Terra convertirà i dati in una nuvola di punti LAS, ma quale versione di LAS (v1.2 o 1.4)?
LAS v1.2
Qual è il flusso di lavoro consigliato per Zenmuse L1?
Consulta la nostra guida alle operazioni L1 disponibile nella L1 Downloads page.
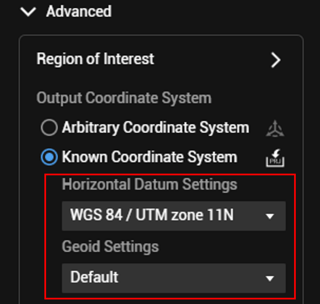
Come si genera il progetto di fotogrammetria in un sistema di coordinate note?
In opzione "Avanzate" – "Sistema di coordinate di output" – "Sistema di coordinate note", seleziona il sistema di coordinate note da "Impostazioni riferimento orizzontale" e "Impostazioni geoidi".
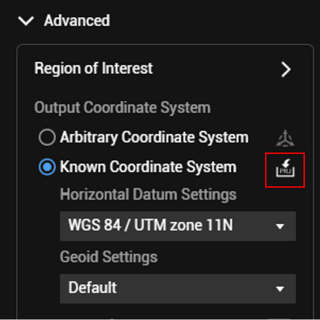
L'elenco del sistema di coordinate note Terra non dispone del sistema di coordinate di cui ho bisogno. Come lo configuro?
- Se disponi del file di proiezione del sistema di coordinate del sistema di coordinate in formato ".prj", in opzione "Avanzate" - "Sistema di coordinate di output" - "Sistema di coordinate note" - Fai clic sull'icona di importazione PRJ e seleziona per importare il sistema di coordinate in formato PRJ.
Se il sistema di coordinate target utilizza un sistema cartesiano personalizzato, è possibile trasformare il risultato TDOM/modello nel sistema cartesiano personalizzato utilizzando lo strumento di trasformazione a sette parametri. Per istruzioni dettagliate su questa procedura, consulta la pagina 29 del manuale d'uso Terra. https://dl.djicdn.com/downloads/dji-terra/20230525/DJI_Terra_User_Manual_v3.7_EN.pdf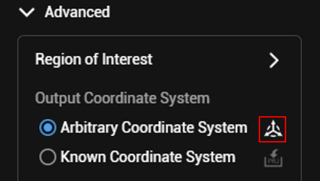
Se l'errore di output è significativamente maggiore quando si seleziona un sistema di coordinate verticali, come va gestita la situazione?
- Il sistema di coordinate verticali di Smart Map utilizza solo le informazioni del sistema di coordinate verticali disponibili al pubblico. Conferma se il file di altitudine è stato aggiunto. Per informazioni specifiche, visita il sito Web https://cdn.proj.org/.
- Se il sistema di coordinate verticali utilizzato non ha un file di altitudine aggiunto e il file di anomalia di altitudine per quell'area non è pubblico, si consiglia di migliorare la precisione dell'altitudine aggiungendo altri GCP.
Terrain Follow
In che modo è possibile utilizzare la funzione Terrain Follow nell'app Pilot 2?
Esistono diversi modi per pianificare i voli Terrain Follow nell'app Pilot.
- Il modello GDEM V3 da 30 m di ASTER è integrato come opzione nell'app Pilot. Seleziona la missione di mappatura, abilita Terrain Follow, seleziona il file DSM, quindi scegli di scaricare da Internet.
- Importa DSM/DEM in formato TIFF in Pilot, seleziona la missione di mappatura, abilita Terrain Follow, seleziona il file DSM, quindi scegli TIFF per importare il modello del terreno.
- Terrain Follow in tempo reale (disponibile solo su Mavic 3 Enterprise, Thermal e Multispectral).
Ecco un breve grafico riepilogativo che illustra la compatibilità della funzione Terrain Follow con le varie modalità di missione:
|
Tipi di missioni che attualmente supportano Terrain Follow |
||||
|
Mappe 2D |
Smart Oblique |
Obliqua |
Linear e |
|
|
M3E DSM Follow |
✓ |
✓ |
✓ |
✓ |
|
M3E Real-Time Terrain Follow |
✓ |
✓ |
X |
✓ |
|
M3T DSM Follow |
✓ |
X |
✓ |
✓ |
|
M3T Real-Time Terrain Follow |
✓ |
X |
X |
✓ |
|
M30 DSM Follow |
✓ |
X |
✓ |
✓ |
|
M300 RTK DSM Follow |
✓ |
✓ |
✓ |
✓ |
Perché non è possibile importare un file tiff WGS84 DSM nell'app Pilot 2?
Utilizza WGS84 Geodetic invece del previsto WGS84. Pilot 2 riconoscerà solo EPSG 4326 Geodetic WGS84 DEM/DSM.
Formati di foto e impostazioni della fotocamera
Qual è l'elenco dei formati di foto per le fotocamere Mavic 3 Enterprise, Zenmuse P1 e Zenmuse L1?
- L1: JPG
- P1: JPG+DNG
- Mavic 3 Enterprise: JPG+DNG
Quali impostazioni degli ingressi della fotocamera possono essere modificate?
Impostazioni della modalità della telecamera (Auto, S, A, M), ISO, apertura, velocità otturatore, valori di esposizione, modalità di messa a fuoco (AF/MF).
Il sensore Zenmuse P1 può scattare tiff grande/piccolo a 8/16 bit?
No, ma Zenmuse P1 genera dati RAW in DNG
Quali sono le impostazioni consigliate per la fotocamera per Mavic 3 Enterprise, Mavic 3 Multispectral e Zenmuse P1 quando si eseguono missioni di fotogrammetria?
Per le impostazioni della fotocamera di Mavic 3 Enterprise:
- Accertati di disattivare l'impostazione "Correzione distorsione"
- Assicurati di attivare l'impostazione "Otturatore meccanico"
- Seleziona "MF" come modalità di messa a fuoco e imposta la messa a fuoco su infinito
- Seleziona "Auto" per la modalità di impostazione della fotocamera
- Se vuoi impostare manualmente l'impostazione della fotocamera per la missione di fotogrammetria, si consiglia di:
- Impostare ISO su auto
- Impostare la velocità dell'otturatore su 1/1000s o su una velocità superiore per evitare la sfocatura del movimento (meccanica fino a 1/2000s)
- Impostare EV su 0
- Impostare AE tra 5.6 e 11
Per le impostazioni della fotocamera Zenmuse P1:
- Accertati di disattivare l'impostazione "Correzione distorsione"
- Assicurati di attivare l'impostazione "Otturatore meccanico"
- Seleziona "MF" come modalità di messa a fuoco e imposta la messa a fuoco su infinito
- Seleziona "M" per la modalità di impostazione della fotocamera
- Imposta Auto ISO (ISO automatico)
- Imposta manualmente l'apertura in base alla luce ambientale. Assicurati di impostare l'apertura tra 5.6-11
- Imposta la velocità dell'otturatore su 1/500s o su una velocità superiore per evitare la sfocatura del movimento (meccanica fino a 1/2000s)
Che cos'è l'opzione "Correzione distorsione" nelle impostazioni della fotocamera dell'app Pilot 2 e dovrei attivarla?
L'attivazione della correzione della distorsione consente di calibrare la distorsione ottica causata dall'obiettivo della fotocamera, con immagini calibrate in tempo reale acquisite e memorizzate nella scheda Micro-SD. Disattivando la correzione della distorsione, la fotocamera acquisirà un'immagine non modificata con un effetto fisheye. I parametri di distorsione dell'obiettivo di Zenmuse P1, Zenmuse L1, Mavic 3 Enterprise Wide Lens, Mavic 3 Multispectral Wide Lens e Phantom 4 RTK sono tutti pre-misurati in fabbrica. Questi parametri univoci vengono salvati in "DewarpData" nel campo XMP per ogni immagine acquisita. Vengono riconosciuti automaticamente quando queste immagini vengono importate nel software DJI Terra. Tuttavia, per il software di fotogrammetria di terze parti, l'utente può immettere manualmente questi parametri per calibrare la distorsione dell'immagine. Poiché la calibrazione della distorsione mediante software di post-elaborazione con i parametri di correzione della distorsione della fotocamera ha una precisione molto migliore rispetto alla funzione di correzione della distorsione integrata nell'app Pilot 2, si consiglia di disattivare questa opzione per scopi di rilevamento.
RTK/PPK
Quale sistema di coordinate viene scritto sui geotag sulla foto? È sempre in Geodetic WGS84?
No, il sistema di coordinate delle immagini dipende dalla sorgente di correzione NTRIP RTK e potrebbe non sempre rientrare in WGS84. Se si utilizza la stazione mobile D-RTK2 come sorgente RTK, il sistema di coordinate orizzontali è in WGS84 EPSG:4326 e il sistema di coordinate verticali in altezza ellissoidale. In Terra, è necessario definire il sistema quando si importano le immagini; in caso contrario, Terra farà in modo che tutti i sistemi di coordinate delle immagini siano orizzontali in WGS84 (EPSG:4326) e verticali in altezza ellissoidale.
Come si può utilizzare una base RTK di terze parti con i droni DJI Enterprise?
Per stazioni base RTK di terze parti è necessario innanzitutto configurare la trasmissione del servizio NTRIP e assicurarsi che la base RTK e M3M RC si trovino nella stessa rete Wi-Fi, quindi nella pagina delle impostazioni RTK dell'app Pilot bisogna assicurarsi di immettere le credenziali per configurare la connessione NTRIP. Ulteriori informazioni sono disponibili alla pagina del manuale 46: https://dl.djicdn.com/downloads/DJI_Mavic_3_Enterprise/20230404/DJI_Mavic_3E_3T_User_Manual_IT.pdf
È necessario inizializzare la stazione base D-RTK2 in una posizione nota prima dell'uso?
La risposta a questa domanda dipende a seconda se utilizzi RTK per un posizionamento ad alta precisione e ti importa soltanto della precisione relativa oppure se utilizzi RTK per la registrazione di dati ad alta precisione globale, come i lavori di ispezione. Nel primo scenario, la risposta è no, mentre nel secondo scenario la risposta è sì.
Can a DJI Enterprise drone with RTK be connected to a third party NTRIP subscription service?Un drone DJI Enterprise con RTK può essere collegato a un servizio di abbonamento NTRIP di terze parti?
Sì, un drone abilitato per DJI Enterprise RTK può connettersi direttamente a un servizio RTK di rete supportato da NTRIP, come Topcon Topnet Live, Leica Smartnet e Trimble VRS. In questo modo è più facile configurare il servizio.
In un nuovo sito in cui non vi sono punti noti per configurare una stazione base D-RTK2, come possiamo garantire una buona precisione dei dati raccolti?
Se è disponibile un servizio NTRIP, è possibile connettersi a Internet e utilizzare RTK tramite un caster NTRIP, a condizione che la linea di base (distanza tra il drone e il caster NTRIP) non sia troppo lontana. Se Internet non è un'opzione, è possibile utilizzare un flusso di lavoro PPK per post-elaborare i dati della stazione base, nonché i dati dell'immagine del drone, invece di utilizzare RTK. Scopri di più su PPK qui.
Quali tipi di messaggi RTCM sono supportati dai droni abilitati per DJI Enterprise RTK?
Fai riferimento alla seguente tabella per individuare i tipi di messaggi RTCM supportati corrispondenti ai modelli di drone:
|
Piattaforma |
Modulo RTK |
Servizio RTK supportato |
Tipo di messaggio RTCM supportato dal protocollo NTRIP |
|
Matrice M300 RTK Matrice M350 RTK |
Antenne RTK doppie |
Rete personalizzata RTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
|
Matrice M30 Matrice M30T |
Antenne RTK doppie |
Rete personalizzata RTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
|
Mavic 3 Enterprise Mavic 3 Thermal Mavic 3 Multispectral |
Opzionale; modulo RTK venduto separatamente |
Rete personalizzata RTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
|
Phantom 4 RTK |
Antenna RTK singola |
Rete personalizzata RTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC |
|
Mavic 2 Enterprise Advanced |
Opzionale; modulo RTK venduto separatamente |
RTK di rete personalizzato (NTRIP) |
TCM 3.0 RTCM 3.1 RTCM 3.2 |



-1.png?width=300&name=M400%20(1)-1.png)
