DJI Enterprise bietet eine Vielzahl von Produkten für Geodatenexperten. Hier finden Sie einige häufig gestellte Fragen und Antworten zu den folgenden Produkten:
- Mavic 3 Enterprise
- Matrice M350/M300 RTK + Zenmuse L1
- Matrice M350/M300 RTK + Zenmuse P1
- DJI Terra
Dieses Dokument enthält Antworten auf häufig gestellte Fragen sowie detaillierte Informationen und Spezifikationen für jedes Produkt. Außerdem enthält es Tipps und Empfehlungen für die Verarbeitung von Daten und das Erzielen genauer Ergebnisse.
Geodatenlösungen
Was sind die Vor- und Nachteile beim Vergleich der Mavic 3 Enterprise, Zenmuse L1 und Zenmuse P1?
| Produkt |
Vorteile |
Nachteile |
|
M350 RTK + Zenmuse L1 |
- Starke Anpassungsfähigkeit: Unbeeinflusst von Lichtverhältnissen und fähig zur Modellierung in Umgebungen mit flacher Oberflächenstruktur. - Ergebnisse können verwendet werden, um ein digitales Höhenmodell (DEM) mit Durchdringung von Baumkronen zu extrahieren. - Gestattet die einfache Erfassung feiner Strukturen aus der Punktwolkenausgabe, z. B. Hochspannungsleitungen. • Hohe Modellierungseffizienz: Ein Flug kann eine ca. 200 ha große Fläche abdecken [1]. |
- Genauigkeit hängt relativ vom ursprünglichen POS-Status ab. - Eine weitere Nachbearbeitung der Punktwolkendaten ist unter Verwendung von Drittanbietersoftware erforderlich, um ein klassifiziertes Punktwolkenergebnis für die Nutzung bereitzustellen. |
|
M350 RTK + Zenmuse P1 |
- Unterstützt mehrere Betriebsmodi: 2D-Orthofoto, 3D-Schrägaufnahmen, Nahaufnahmen usw. - Hohe Betriebseffizienz: Ein Flug kann ein Orthofoto von einer ca. 300 ha großen Fläche aufnehmen [2] - Hohe Genauigkeit: Entspricht der Genauigkeit einer Katastervermessung von 1:500 ohne Anwendung von Bodenkontrollpunkten. - Hohe Pixelanzahl: Bis zu 45 Millionen Pixel mit Vollformatkamera. |
- Kann das Problem der Nachtmodellierung oder eines Modellierungsbereichs mit flacher Oberflächenstruktur nicht lösen. - Da Fotogrammetrie-Lösungen die Baumkronen nicht wie LiDAR durchdringen können, sind die resultierenden Modelle auf DSM-Ergebnisse beschränkt und können keine DEM-Ergebnisse erzeugen. - Das Fotogrammetrie-Verfahren erfordert deutlich mehr GPU-Verarbeitungsleistung, um die Aerotriangulation durchzuführen und Modelle aus RAW-Bildern zu generieren. Im Gegensatz dazu müssen LiDAR-Daten nur in ein universelles Format konvertiert werden, um sie nutzbar zu machen. Daher ist die Effizienz der Datenerfassungs- und Verarbeitungsphasen in der Fotogrammetrie-Lösung im Vergleich zur LiDAR-Lösung geringer. |
|
Mavic 3 Enterprise |
- Niedrige Eintrittsschwelle, äußerst kostengünstig - Klein und tragbar, einfach zu verwenden - Im Vergleich zur P4 Pro oder P4 RTK ist die Mavic 3 Enterprise leichter und handlicher, bietet bessere Möglichkeiten zur Hindernisvermeidung, eine längere Akkulaufzeit und überlegene technische Daten der Kamera. |
- Relativ geringe Betriebseffizienz im Vergleich zur P1 - Geringere Pixelanzahl der Kamera im Vergleich zur P1 - Nicht für groß angelegte Einsätze geeignet - Die Nachteile der Zenmuse P1 gelten auch für die Mavic 3 Enterprise |
Hinweis:
[1] Fluggeschwindigkeit von 36 km/h, Flughöhe von 100 m, Überlappung quer zur Flugrichtung von 20%, Datenerfassungszeit von 30 Minuten, Punktwolkendichte größer als 200 Punkten/m²*.
[2] Mit 35-mm-Objektiv, Bodenauflösung von 3 cm, Flugeinsatzeinstellungen: Überlappung in Flugrichtung von 75%, Überlappung quer zur Flugrichtung von 55 %.
Vergleich der Fotogrammetrie-Funktionen zwischen Kameras:
|
Mavic 3 Enterprise with RTK module (Wide Camera) |
Matrice M350 RTK + Zenmuse P1 |
Matrice M350 RTK + Zenmuse L1 |
|
|
Größe |
Klein |
Mittelgroß |
Mittelgroß |
|
Vermessungsqualität |
Ja |
Ja |
Ja |
|
RTK/PPK-Unterstützung |
Ja |
Ja |
Ja |
|
GSD (cm) |
H(m)/36.5 |
24mm: H(m)/5535mm: H(m)/8050mm: H(m)/120 |
H(m)/36.5 |
|
Sensorgröße |
4/3"5280 × 3956 (4:3) |
Vollformat (35.9×24mm)8192 × 5460 (3:2) |
1"5472 × 3648 (3:2) |
|
Standbildauflösung |
20MP |
45MP |
20MP |
|
Pixelgröße |
3.3μm |
4.4μm |
2.4μm |
|
Objektivoption |
12 mm/24 mm Äquivalentes Sichtfeld 84,0° |
DL 24mm; Sichtfeld 84.0° |
8,8 mm/24 mm Äquivalentes Sichtfeld 84,0° |
|
Mechanischer Verschluss |
Ja (1/2000-8s) |
Ja (1/2000-1s) |
Ja (1/2000-8s) |
|
Minimales Foto-Intervall |
0.7s |
0.7s |
2.5s |
|
Flugzeit |
Bis zu 42 Min. (mit RTK-Modul) |
Bis zu 44 Min. |
Bis zu 42 Min. |
|
Speicherbedarf |
microSDUHS-I Geschwindigkeitsklasse 3 oder höher Max. Speicherkapazität: 512 GB |
SD-Karte UHS-I oder höher Max. Speicherkapazität: 512 GB |
microSD UHS-I Geschwindigkeitsklasse 3 oder höher Max. Speicherkapazität: 256 GB |
|
Max. Windwiderstandsfähigkeit |
12m/s |
12m/s |
12m/s |
|
Unterstützung für intelligente Schrägaufnahmen |
Ja |
Ja |
Nein |
|
Echtzeit-Geländeverfolgung |
Ja |
Nein |
Nein |
|
SDK- und Drittanbieter-App-Unterstützung |
Ja |
Ja |
Ja |
Wie greife ich auf die Parameter für die Objektivverzeichnung zu?
Um manuell auf die Parameter für die Objektivverzeichnung zuzugreifen, öffnen Sie das Bild im JPG-Format als Textdatei und suchen Sie im XMP-Datenfeld nach dem Stichwort „DewarpData“. Das Textformat sollte in etwa wie folgt lauten: drone-dji: DewarpData = "2023-03-13;3663.4800000000…"
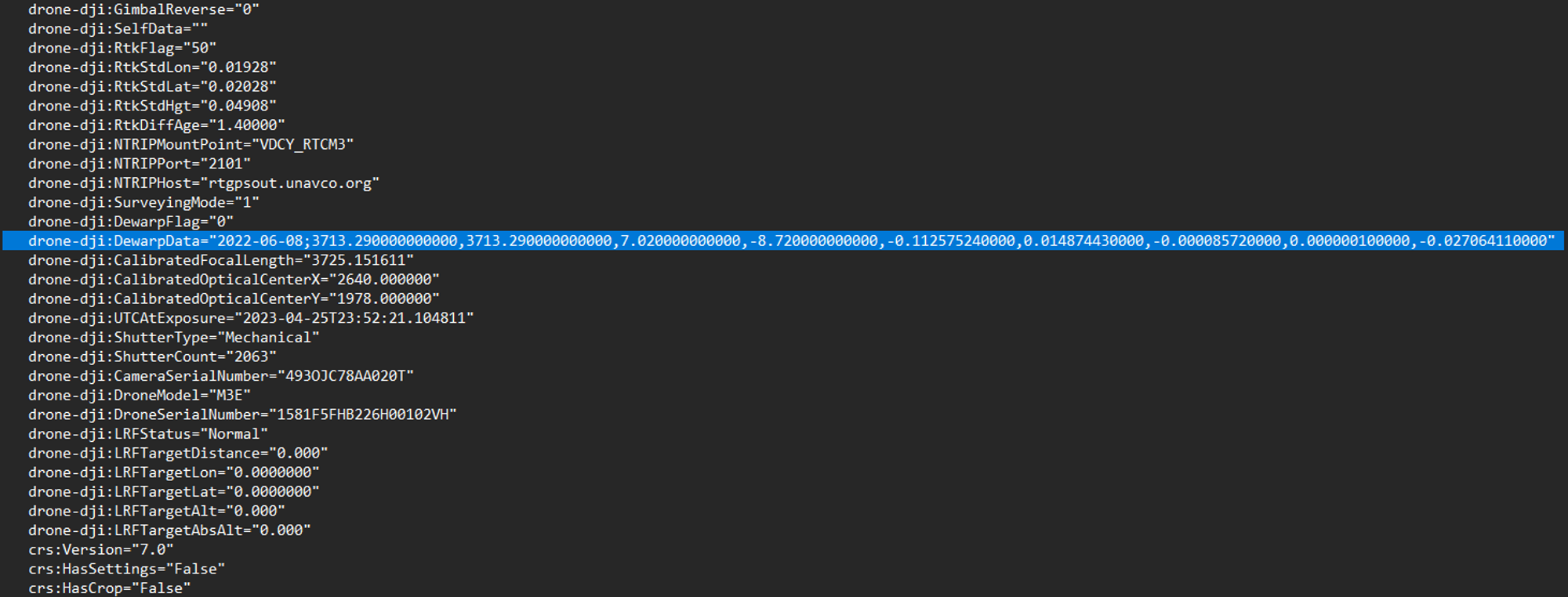
Die Zahlen in der Reihenfolge entsprechen: "calibrate_date;fx,fy,cx,cy,k1,k2,p1,p2,k3". Dabei steht „fx,fy“ für die Brennweite im Pixel, „cx,cy“ für die optische Mitte in Pixelkoordinaten ausgedrückt (Ursprung als Bildmitte), „k1,k2,k3“ für die radiale Verzeichnung und „p1,p2“ für die tangentiale Verzeichnung.
Weitere Informationen finden Sie unter Kamerakalibrierung mit OpenCV.
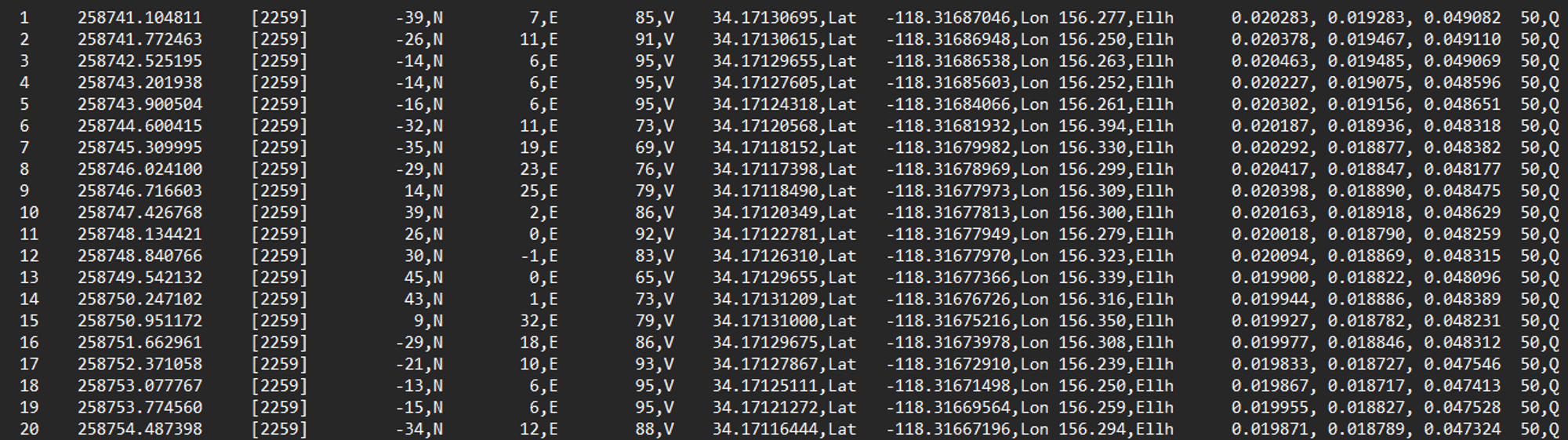
Was bedeuten die einzelnen Datenspalten in der Datei „XXX_Timestamp.MRK“?
Spalte 1: Entsprechende Nummer des Fotos
Spalte 2: Die Belichtungszeit des GPS, Sekunden seit Beginn der Woche (UTC-Zeit)
Spalte 3: Die Belichtungszeit des GPS, Woche (UTC-Zeit)
Spalte 4: Phasenkorrekturwert zwischen der Nordantenne (N) und der Mitte des CMOS-Sensors. (Einheit: Millimeter)
Spalte 5: Phasenkorrekturwert zwischen der Ostantenne (E) und der Mitte des CMOS-Sensors. (Einheit: Millimeter)
Spalte 6: Phasenkorrekturwert zwischen der Richtantenne (V) aufwärts und abwärts (abwärts: positiver Wert) und der Mitte des CMOS-Sensors. (Einheit: Millimeter)
Spalte 7: Echtzeit-Breitengrad (Spalte 8) und -Längengrad (Spalte 8) der CMOS-Mitte bei Belichtungszeit in Dezimalgraden.
Spalte 9: Echtzeit-Höhe der CMOS-Mitte bei Belichtungszeit in Metern. Bei dieser Höhe handelt es sich um die geodätische Höhe (allgemein bekannt als Ellipsoidhöhe) relativ zur Standard-Referenzellipsoidoberfläche. (Sie können Ihr eigenes Ellipsoidmodell festlegen. Der Standardwert ist WGS84. Sie können das Modell auch auf andere Ellipsoide einstellen, indem Sie auf verschiedene CORS-Stationssysteme/Höhenfestpunkte zugreifen, z. B. CGCS2000.) Hinweis: Diese Höhe basiert nicht auf dem weltweit üblichen Höhenfestpunktmodell EGM96/2008 (orthometrische Höhe).
Spalten 10 bis 12: Die Standardabweichung der Positionierung ergibt sich jeweils in der nördlichen und östlichen Richtung und der Aufwärtsrichtung. Dies gibt die relative Genauigkeit der Positionierung in den drei Richtungen an. (Einheit: Meter)
Spalte 13: RTK-Status, 0: keine Positionierung, 16: Einzelpunkt-Positionierungsmodus, 34: RTK Float-Lösung, 50: RTK Fix-Lösung. Wenn das Flag eines Fotos nicht 50 ist, wird dieses Foto nicht für die direkte Kartierung empfohlen.
Zenmuse L1
Können Bodenkontrollpunkte (Ground Control Points, GCPs) zur Verarbeitung von LiDAR-Daten in DJI Terra verwendet werden?
Terra unterstützt den GCP-Import für LiDAR-Daten nicht. Für die Anwendung von GCPs auf LiDAR-Daten der L1 wird jedoch eine Drittanbieter-Software wie TerraSolid UAV empfohlen.
Welche weiteren Datenformate werden neben LAS von der Zenmuse L1 ausgegeben?
PNTS, PLY, PCD, S3MB
Können L1-Rohdaten ohne RTK-Verbindung verarbeitet werden? Können Zenmuse L1-Rohdaten während eines regulären GPS-Fluges verarbeitet werden?
Ja, Sie können L1-Rohdaten ohne RTK-Verbindung verarbeiten. Sie müssen jedoch eine Basisstation-Beobachtungsdatei (RINEX, RTCM, OEM oder UBX) zusammen mit den restlichen Rohdaten zum L1-Rohdatenordner hinzufügen, damit die Punktwolkendatei in DJI Terra korrekt verarbeitet und ausgegeben werden kann. Bei diesem Verfahren werden die Daten nachbearbeitet (Post-Processed Kinematics, PPK).
Weitere Informationen zu diesem Verfahren finden Sie im Handbuch, insbesondere auf Seite 11:https://dl.djicdn.com/downloads/Zenmuse_L1/20230420/DJI_L1_Operation_Guidebook_V1.2.pdf
Können Daten von mehreren Flügen mit der Zenmuse L1 in einer einzigen Punktwolke in DJI Terra zusammengeführt werden?
Ja, Sie können mehrere Ordner mit Rohdaten importieren, die auf L1-Flügen erfasst wurden. Aktivieren Sie die Option „Zusammengeführte Ausgabe“ und erstellen Sie mithilfe von Terra eine LAS-Datei mit der Punktwolke als Ausgabe.
Was ist der Unterschied zwischen einfachem, doppeltem und dreifachem Rücksignal und was sind die besten Verfahren für deren Verwendung?
Rücksignal-/Echomodus: Gibt an, dass der LiDAR nach dem Auslösen eines Laserstrahls mehrere Rücksignale empfangen kann.
Der Modus mit einfachem Rücksignal bedeutet, dass ein Laserpunkt ausgestrahlt wird und der LiDAR höchstens ein Rücksignal empfangen kann. Der Modus mit doppeltem Rücksignal bedeutet, dass ein Laserpunkt ausgestrahlt wird und der LiDAR höchstens zwei Rücksignale empfangen kann. Der Modus mit dreifachem Rücksignal bedeutet, dass der LiDAR höchstens drei Rücksignale pro Laserpunkt empfangen kann.
Wenn nur Oberflächeninformationen oder ein DSM benötigt werden, reicht der Modus mit einfachem Rücksignal aus. In Szenarien wie der Vermessung in der Forstwirtschaft, bei der eine Durchdringung von Baumkronen und DEM-Daten benötigt werden, ist jedoch der Modus mit doppeltem oder dreifachem Rücksignal erforderlich.
Kann die Zenmuse L1 am dualen abwärts gerichteten Gimbal oder aufwärts gerichteten Gimbal der M350/M300 RTK montiert werden?
Nein, die Zenmuse L1 kann nur am einzelnen abwärts gerichteten Gimbal der M300/M350 RTK montiert werden. Bei Verwendung am dualen abwärts gerichteten Gimbal oder aufwärts gerichteten Gimbal unterscheidet sich die Position des Gimbals von der vordefinierten Position, sodass die Genauigkeit beeinträchtigt wird.
Zenmuse P1
Funktioniert das Objektiv der Zenmuse X7 auf der Zenmuse P1?
Nur 24 mm, 35 mm und 50 mm. Das 16-mm-Objektiv funktioniert aufgrund der Sensorgröße nicht mit der P1.
Nach einer ordnungsgemäßen Kalibrierung entspricht die Genauigkeit den Anforderungen an die Vermessungsqualität. Die DJI Terra-Software kann für die erste Kalibrierung und zum Überschreiben der neuen Objektivparameter verwendet werden. Eine Anleitung finden Sie unten.
Ich habe das Objektiv der Zenmuse P1 gewechselt und jetzt sind alle Parameter für die Verzeichnung des Kameraobjektivs veraltet. Wie kann ich die internen Parameter bei einem neuen Objektiv neu kalibrieren?
Um zu überprüfen, ob das P1-Objektiv richtig kalibriert ist, öffnen Sie zunächst das P1.jpg-Foto als Textdatei und suchen Sie nach dem XMP-Datenfeld „DewarpData“. Wenn dieses Feld nicht aufgeführt ist, wurde das Objektiv nicht ordnungsgemäß kalibriert. Um die Parameter für die Objektivverzeichnung neu zu kalibrieren, gehen Sie wie folgt vor:
- Kalibrierungsdaten erfassen
- Es wird empfohlen, die Kalibrierung in Bereichen mit großen Höhenunterschieden wie Gebäuden oder Hügeln vorzunehmen.
- Verwenden Sie die intelligente Schrägaufnahme oder den Schrägluftbildauftrag (fünf Flugrouten), um den Flugeinsatz zu planen.
- Parameteranforderungen: Es sollten mehr als 100 Bilder erfasst werden. Die Überlappung in Flugrichtung sollte mindestens 80 % und die Überlappung quer zur Flugrichtung mindestens 70 % betragen. Die Schrägaufnahmen sollten mindestens 2/3 ausmachen. (Keine Begrenzung der Flughöhe)
- Schalten Sie RTK ein und starten Sie, sobald RTK FIX angezeigt wird.
- Modellierung: Erstellen Sie mit DJI Terra v2.3.1 oder höher einen neuen 3D-Rekonstruktionseinsatz und beginnen Sie mit der Modellierung.
- Kalibrierung
- Öffnen Sie nach Abschluss der Modellierung den Ordner, suchen Sie die Datei „sfm_report.json“ im Verzeichnis „AT-Report“ und kopieren Sie sie auf die SD-Karte der Kamera.
- Setzen Sie die SD-Karte in die P1-Kamera ein, verbinden Sie sie mit dem Fluggerät und schalten Sie sie ein. Anschließend schreibt die Kamera nach der Kalibrierung automatisch die internen Parameter.
- Nehmen Sie ein Bild auf, öffnen Sie es mit Notepad und suchen Sie nach XMP. Wenn Sie „DewarpData“ jetzt finden, bedeutet dies, dass die Kalibrierung der internen Kameraparameter erfolgreich war.
Kann die Zenmuse P1 am dualen abwärts gerichteten Gimbal oder aufwärts gerichteten Gimbal der M350/M300 RTK montiert werden?
Nein, die Zenmuse P1 kann nur am einzelnen abwärts gerichteten Gimbal der M300/M350 RTK montiert werden. Bei Verwendung am dualen abwärts gerichteten Gimbal oder aufwärts gerichteten Gimbal unterscheidet sich die Position des Gimbals von der vordefinierten Position, sodass die Genauigkeit beeinträchtigt wird.
DJI Terra
Gibt es eine Bildverarbeitungssoftware für Fotogrammetrie, mit der Drohnenbilder in eine 2D-Karte oder ein 3D-Modell zusammengefügt und umgewandelt werden können?
Ja, zu diesem Zweck können Sie die DJI Terra-Software verwenden. DJI Terra kann digitale Oberflächenmodelle (DSM) und echte digitale Orthofotokarten (TDOM) im GeoTIFF-Format und als 3D-Netz- oder Punktwolkenmodelle ausgeben.
Welche Software wird empfohlen, um die Bilder in eine Orthofotokarte zu verarbeiten und die digitalen Oberflächen zu erzeugen?
Wir empfehlen DJI Terra für die Offline-Verarbeitung oder eine Drittanbietersoftware, die Ihren Anforderungen entspricht.
Auf was sollte ich vor der Verarbeitung von Drohnenfotos in DJI Terra achten?
Prüfen Sie in den Kameraeinstellungen, dass die Option „Mechanischer Verschluss“ aktiviert und die Option „Kompensation“ deaktiviert ist, bevor Sie den Flug beginnen.
Wenn Sie PPK verwenden, achten Sie darauf, dass Ihre Bildpositionsdaten korrekt sind. Bei RTK brauchen Sie mit den Fotos nichts weiter zu unternehmen.
Welche zusätzlichen Änderungen können bei der Verarbeitung der importierten Drohnen-Bilddaten in Terra vorgenommen werden?
Bei der Verarbeitung mit Terra gibt es keine Einstellungen, um die Farbkonzentration, Belichtung und andere Eigenschaften anzupassen. Sie können nur die POS-Bilddaten ändern. Darunter fallen Koordinatensysteme und Eulersche Winkel. DJI Terra bietet jedoch zusätzliche Funktionen, z. B. die Reduzierung von Trübungen, die Verfeinerung von Wasseroberflächen und die Gleichförmigkeit des Lichts, um die Qualität der Rekonstruktionsausgabe sicherzustellen.
Wie können verschwommene Bilder, die mit Drohnen erfasst wurden, während des Flugs minimiert werden?
Wir empfehlen Folgendes: Stellen Sie die Verschlusszeit auf eine Geschwindigkeit von mehr als 1/500 s ein, aktivieren Sie den mechanischen Verschluss, setzen Sie den ISO-Wert auf automatisch und passen Sie die Blende entsprechend an.
Sind die GPS/IMU-Informationen an das Foto-Metadatenfeld angehängt?
Ja. Weitere Informationen zum XMP-Metadatenfeld finden Sie auch im P1-Benutzerhandbuch auf den Seiten 22 bis 23: Zenmuse_P1/20230530/Zenmuse_P1%20_User%20Manual_v1.4_DE.pdf (dji.com/de)
Können die in DJI Terra verarbeiteten LiDAR-Daten kalibriert/klassifiziert werden?
Es kann nur der Boden klassifiziert werden. Terra verfügt außerdem über grundlegende Funktionen zur Reduzierung von Rauschen, wodurch die Punktwolke ausgedünnt wird.
Befinden sich die Flugbahndaten von Zenmuse L1 in einer anderen Datei als die LAS-Punktwolke?
Ja, sie werden im Format „sbet.out“ unter dem Terra-Projektergebnisordner ausgegeben.
Der LiDAR-Sensor der Zenmuse L1 verfügt auch über eine RGB-Kamera. Handelt es sich bei den Ausgabedaten um eine farbige Punktwolke?
Fotos können zur gleichen Zeit wie die Rohdaten der Punktwolke aufgenommen werden. Diese Fotos können dann für die Fotogrammetrie-Verarbeitung oder die Punktwolken-Farbgebung verwendet werden.
Terra konvertiert die Daten in eine LAS-Punktwolke, aber in welche Version? LAS v1.2 oder 1.4?
LAS v1.2
Wie lautet der empfohlene Workflow für die Zenmuse L1?
Weitere Informationen finden Sie in unserem Betriebshandbuch für die L1, das auf der Download-Seite für die L1verfügbar ist.
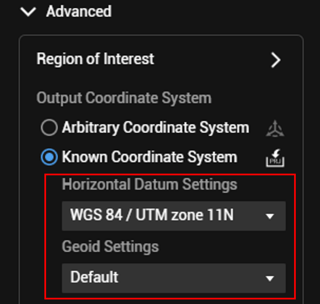
Wie wird das Fotogrammetrie-Projekt in einem bekannten Koordinatensystem ausgegeben?
Wählen Sie unter der Option „Erweitert“ – „Ausgabekoordinatensystem“ – „Bekanntes Koordinatensystem“ das bekannte Koordinatensystem aus den „Horizontalen Datumseinstellungen“ und den „Geoid-Einstellungen“ aus.
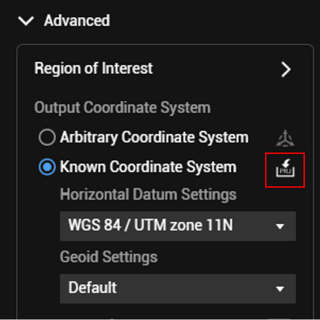
In der Liste der bekannten Koordinatensysteme in Terra ist das Koordinatensystem, das ich benötige, nicht enthalten. Wie kann ich es festlegen?
- Wenn Sie die Koordinatensystem-Projektionsdatei im PRJ-Format vorliegen haben, klicken Sie unter der Option „Erweitert“ – „Ausgabekoordinatensystem“ – „Bekanntes Koordinatensystem“ auf das PRJ-Importsymbol und bestätigen Sie, dass Sie das Koordinatensystem im PRJ-Format importieren möchten.
 Wenn das Zielkoordinatensystem ein benutzerdefiniertes kartesisches System verwendet, können Sie das TDOM-/Modellergebnis mithilfe des Transformationstools der sieben Parameter in das benutzerdefinierte kartesische System umwandeln. Detaillierte Anweisungen zu diesem Verfahren finden Sie auf Seite 29 des Handbuchs für Terra.https://dl.djicdn.com/downloads/dji-terra/20230525/DJI_Terra_User_Manual_v3.7_EN.pdf
Wenn das Zielkoordinatensystem ein benutzerdefiniertes kartesisches System verwendet, können Sie das TDOM-/Modellergebnis mithilfe des Transformationstools der sieben Parameter in das benutzerdefinierte kartesische System umwandeln. Detaillierte Anweisungen zu diesem Verfahren finden Sie auf Seite 29 des Handbuchs für Terra.https://dl.djicdn.com/downloads/dji-terra/20230525/DJI_Terra_User_Manual_v3.7_EN.pdf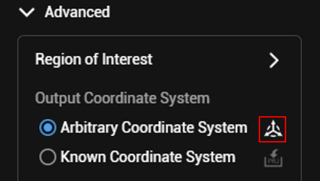
Wie sollte vorgegangen werden, wenn der Ausgabefehler bei der Auswahl eines vertikalen Koordinatensystems erheblich größer ist?
- Das vertikale Koordinatensystem von Smart Map verwendet nur öffentlich verfügbare vertikale Koordinatensysteminformationen. Bestätigen Sie, ob die Höhendatei hinzugefügt wurde. Detaillierte Informationen finden Sie auf der Website https://cdn.proj.org/.
- Wenn dem verwendeten vertikalen Koordinatensystem keine Höhendatei hinzugefügt wurde und die Höhenanomaliedatei für diesen Bereich nicht öffentlich ist, wird empfohlen, die Höhengenauigkeit durch Hinzufügen weiterer GCPs zu verbessern.
Terrain Follow
Wie kann die Funktion zur Geländeverfolgung in der Pilot 2-App verwendet werden?
Es gibt mehrere Möglichkeiten, Geländeverfolgungsflüge in der Pilot-App zu planen.
- Das Modell ASTER GDEM V3 30 m ist als Option in die Pilot-App integriert. Wählen Sie „Kartierungseinsatz“ aus, aktivieren Sie „Geländeverfolgung“, wählen Sie „DSM-Datei“ aus und dann die Option zum Herunterladen aus dem Internet.
- Importieren Sie die DSM/DEM-Datei im TIFF-Format in die Pilot-App, wählen Sie „Kartierungseinsatz“ aus, aktivieren Sie „Geländeverfolgung“, wählen Sie „DSM-Datei“ aus und dann die TIFF-Datei, um das Geländemodell zu importieren.
- Geländeverfolgung in Echtzeit (nur verfügbar bei Mavic 3 Enterprise, Thermal und Multispectral)
Hier ist eine kurze Übersicht, in der die Kompatibilität der Geländeverfolgungsfunktion mit verschiedenen Einsatzmodi erläutert wird:
|
Einsatzarten mit aktueller Unterstützung für Geländeverfolgung |
||||
|
2D-Kartierung |
Intelligente Schrägaufnahme |
Schrägaufnahme |
Linear |
|
|
M3E DSM-Verfolgung |
✓ |
✓ |
✓ |
✓ |
|
M3E Geländeverfolgung in Echtzeit |
✓ |
✓ |
X |
✓ |
|
M3T DSM-Verfolgung |
✓ |
X |
✓ |
✓ |
|
M3T Geländeverfolgung in Echtzeit |
✓ |
X |
X |
✓ |
|
M30 DSM-Verfolgung |
✓ |
X |
✓ |
✓ |
|
M300 RTK DSM-Verfolgung |
✓ |
✓ |
✓ |
✓ |
Warum kann ich keine WGS84 DSM TIFF-Datei in die Pilot 2-App importieren?
Verwenden Sie das geodätische WGS84 anstelle des projizierten WGS84. Pilot 2 erkennt nur das geodätische EPSG 4326 WGS84 DEM/DSM.
Fotoformate und Kameraeinstellungen
Wie lautet die Liste der Fotoformate für die Kameras Mavic 3 Enterprise, Zenmuse P1 und Zenmuse L1?
- L1: JPG
- P1: JPG+DNG
- Mavic 3 Enterprise: JPG+DNG
Welche Kameraeingabeeinstellungen können geändert werden?
Kameramoduseinstellungen (Auto, S, A, M), ISO, Blende, Verschlusszeit, Belichtungswerte, Fokusmodus (AF/MF).
Kann der Sensor der Zenmuse P1 große/kleine 8/16-Bit-TIFF-Bilder aufnehmen?
Nein, aber die Zenmuse P1 gibt RAW-Daten im DNG-Format aus.
Welche Kameraeinstellungen werden für die Mavic 3 Enterprise, Mavic 3 Multispectral und die Zenmuse P1 bei der Durchführung von Fotogrammetrie-Einsätzen empfohlen?
Kameraeinstellungen für die Mavic 3 Enterprise:
- Deaktivieren Sie die Einstellung „Kompensation“.
- Aktivieren Sie die Einstellung „Mechanischer Verschluss“.
- Wählen Sie „MF“ als Fokusmodus aus und stellen Sie den Fokus auf „Unendlich“ ein.
- Wählen Sie „Auto“ für den Kameraeinstellungsmodus aus.
- Wenn Sie die Kameraeinstellungen für die Fotogrammetrie manuell festlegen möchten, empfehlen wir Folgendes:
- Stellen Sie „ISO“ auf „Auto“ ein.
- Stellen Sie die Verschlusszeit auf mindestens 1/1000 s ein, um Bewegungsunschärfen zu vermeiden („Mechanischer Verschluss“ bis zu 1/2000 s).
- Setzen Sie „EV“ auf 0.
- Stellen Sie „AE“ zwischen 5,6 und 11 ein.
Kameraeinstellungen für die Zenmuse P1:
- Deaktivieren Sie die Einstellung „Kompensation“.
- Aktivieren Sie die Einstellung „Mechanischer Verschluss“.
- Wählen Sie „MF“ als Fokusmodus aus und stellen Sie den Fokus auf „Unendlich“ ein.
- Wählen Sie „M“ für den Kameraeinstellungsmodus aus.
- Stellen Sie „ISO“ auf „Auto“ ein.
- Stellen Sie die Blende manuell anhand des Umgebungslichts ein. Stellen Sie die Blende auf einen Wert zwischen 5,6 und 11 mm ein.
- Stellen Sie die Verschlusszeit auf mindestens 1/500 s ein, um Bewegungsunschärfen zu vermeiden („Mechanischer Verschluss“ bis zu 1/2000 s).
Was bedeutet die Option „Kompensation“ in den Kameraeinstellungen der Pilot 2-App? Soll ich sie aktivieren?
Durch Aktivieren der Kompensation wird die durch das Kameraobjektiv verursachte optische Verzeichnung kalibriert, wobei in Echtzeit kalibrierte Bilder auf der Micro-SD-Karte erfasst und gespeichert werden. Wenn Sie die Verzeichnungskorrektur deaktivieren, erfasst die Kamera ein nicht bearbeitetes Bild mit Fischaugeneffekt. Die Parameter für die Objektivverzeichnung der Zenmuse P1, Zenmuse L1, Mavic 3 Enterprise mit Weitwinkelobjektiv, Mavic 3 Multispectral mit Weitwinkelobjektiv und der P4 RTK sind alle werkseitig vorvermessen. Diese individuellen Parameter werden in „DewarpData“ unter dem XMP-Feld für jedes erfasste Bild gespeichert. Sie werden automatisch erkannt, wenn diese Bilder in die DJI Terra-Software importiert werden. Bei Fotogrammetrie-Software von Drittanbietern können Sie diese Parameter jedoch manuell eingeben, um die Bildverzeichnung zu kalibrieren. Da die Verzeichnungskalibrierung in einer Nachbearbeitungssoftware mit den Kamera-Kompensationsparametern im Vergleich zur integrierten Verzeichnungskorrekturfunktion in der Pilot 2-App eine wesentlich höhere Genauigkeit aufweist, empfehlen wir, diese Option für Vermessungszwecke zu deaktivieren.
RTK/PPK
Welches Koordinatensystem wird in die Geotags auf dem Foto geschrieben? Handelt es sich dabei immer um das geodätische WGS84?
Nein, das Koordinatensystem der Bilder hängt von der NTRIP RTK-Korrekturquelle ab und fällt möglicherweise nicht immer unter das WGS84. Wenn Sie die D-RTK2-Mobilstation als RTK-Quelle verwenden, ist das horizontale Koordinatensystem das WGS84 EPSG:4326 und das vertikale Koordinatensystem die Ellipsoidhöhe. In Terra müssen Sie das System beim Importieren von Bildern festlegen. Andernfalls legt Terra alle Bildkoordinatensysteme standardmäßig horizontal auf das WGS84 (EPSG:4326) und vertikal auf die Ellipsoidhöhe fest.
Wie lässt sich eine RTK-Basisstation von Drittanbietern mit DJI Enterprise-Drohnen verwenden?
Für RTK-Basisstationen von Drittanbietern müssen Sie zunächst die Übertragung des NTRIP-Dienstes konfigurieren und sicherstellen, dass sich die RTK-Basisstation und die M3M-Fernsteuerung im selben WLAN-Netz befinden. Anschließend müssen Sie in der Pilot-App auf der Seite mit den RTK-Einstellungen die Anmeldeinformationen eingeben, um die NTRIP-Verbindung zu konfigurieren. Weitere Informationen finden Sie im Handbuch auf Seite 50:https://dl.djicdn.com/downloads/DJI_Mavic_3_Enterprise/20230531/DJI_Mavic_3E-3T_UM_de_v1.4.pdf
Muss die D-RTK2-Basisstation vor der Verwendung über einen bekannten Standort initialisiert werden?
Die Antwort auf diese Frage hängt davon ab, ob Sie RTK für eine hochpräzise Positionierung verwenden und nur auf die relative Genauigkeit achten oder ob Sie RTK für eine hochpräzise globale Datenaufzeichnung verwenden, z. B. für Vermessungsarbeiten. Im ersten Fall lautet die Antwort „Nein“, im zweiten Fall „Ja“.
Kann eine DJI Enterprise-Drohne mit RTK mit einem NTRIP-Abonnementdienst eines Drittanbieters verbunden werden?
Ja, eine RTK-fähige DJI Enterprise-Drohne kann direkt mit einem NTRIP-unterstützten RTK-Netzwerkdienst wie Topcon Topnet Live, Leica SmartNet und Trimble VRS verbunden werden. Dies erleichtert die Einrichtung des Dienstes.
Wie lässt sich an einem neuen Standort, an dem es keine bekannten Punkte für die Einrichtung einer D-RTK2-Basisstation gibt, eine gute Genauigkeit der erfassten Daten sicherstellen?
Wenn ein NTRIP-Dienst verfügbar ist, können Sie eine Verbindung zum Internet herstellen und RTK über einen NTRIP-Caster verwenden, solange die Grundlinie (Abstand zwischen Drohne und NTRIP-Caster) nicht zu weit entfernt ist. Wenn das Internet keine Option ist, können Sie einen PPK-Workflow anwenden, um die Daten der Basisstation sowie die Bilddaten der Drohne nachzubearbeiten, anstatt RTK zu verwenden. Weitere Informationen zu PPK finden Sie hier.
Welche RTCM-Meldungstypen werden von RTK-fähigen DJI Enterprise-Drohnen unterstützt?
In der folgenden Tabelle finden Sie die unterstützten RTCM-Meldungstypen entsprechend der Drohnenmodelle:
|
Plattform |
RTK-Modul |
Unterstützter RTK-Dienst |
Vom NTRIP-Protokoll unterstützter RTCM-Meldungstyp |
|
Matrice M300 RTK Matrice M350 RTK |
RTK-Doppelantennen |
Benutzerdefinierte Netzwerk-RTK (NTRIP) DJI D-RTK 2Custom Network RTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
|
Matrice M30 Matrice M30T |
RTK-Doppelantennen |
Benutzerdefinierte Netzwerk-RTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
|
Mavic 3 Enterprise Mavic 3 Thermal Mavic 3 Multispectral |
Optional, RTK-Modul separat erhältlich |
Benutzerdefinierte Netzwerk-RTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
|
Phantom 4 RTK |
RTK-Einzelantenne |
Benutzerdefinierte Netzwerk-RTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC |
|
Mavic 2 Enterprise Advanced |
Optional, RTK-Modul separat erhältlich |
Benutzerdefinierte Netzwerk-RTK (NTRIP) |
TCM 3.0 RTCM 3.1 RTCM 3.2 |