
Post-Processed Kinematic (PPK) ist eine Methode zur Verwendung von GNSS-Daten (Global Navigation Satellite System) zur genauen Bestimmung der Position und Flugbahn eines Rovers bzw. einer Drohne. Bei PPK werden GNSS-Rohdaten von einer Drohne zusammen mit Informationen über die Position und die Flugbahn von nahegelegenen Referenzstationen gesammelt und dann nachträglich verarbeitet, um die Genauigkeit der Positions- und Flugbahninformationen zu verbessern.
PPK wird häufig in Anwendungen wie Vermessung, Kartierung und Präzisionslandwirtschaft eingesetzt, bei denen es auf eine hochgenaue Positionierung ankommt. Im Gegensatz zur kinematischen Echtzeit-Positionierung (Real-Time Kinematic, RTK), die eine drahtlose Echtzeit-Verbindung zu Referenzstationen erfordert, kann PPK auch nachträglich durchgeführt werden, was eine größere Flexibilität bei der Datenerfassung ermöglicht.
Bei der Nachbearbeitung von GNSS-Daten wird eine spezielle Software eingesetzt, um die vom Empfänger gesammelten Rohdaten zu verarbeiten und sie mit den Daten von nahegelegenen Referenzstationen zu vergleichen, um den genauen Standort der Drohne zu einem bestimmten Zeitpunkt zu bestimmen. Durch diesen Prozess kann die Genauigkeit von Positions- und Flugbahninformationen durch die Korrektur von Fehlern verbessert werden, die durch Faktoren wie atmosphärische Bedingungen und Abweichungen von der Satellitenbahn verursacht werden.
Obwohl sowohl RTK- als auch PPK-Positionierung für Drohnen-Kartierungsanwendungen verwendet werden können, bietet PPK einige Vorteile gegenüber RTK:
|
Vorteile |
Nachteile |
|
|
RTK |
Feedback in Echtzeit: Bei RTK steht während des Fluges ein Echtzeit-Feedback zur Verfügung, was es einfacher macht, auftretende Probleme zu erkennen und zu beheben. Schnelle Datenverarbeitung: RTK-Daten können schnell verarbeitet werden, wodurch das Endergebnis in kürzerer Zeit geliefert werden kann. Benutzerfreundlich: RTK ist in der Regel einfacher zu handhaben als PPK und erfordert weniger Kenntnisse bei der Einrichtung und Bedienung. |
Geringere Genauigkeit: Die RTK-Genauigkeit kann durch Kommunikationsverzögerungen und -unterbrechungen beeinträchtigt werden. Deshalb ist die Genauigkeit von RTK geringer als die von PPK. Abhängigkeit von der Kommunikation: RTK erfordert eine Echtzeit-Kommunikation mit einer Referenzstation während des Fluges, was in abgelegenen oder ländlichen Gebieten mit begrenzter oder fehlender Mobilfunkabdeckung bei der Verwendung von RTK über das NTRIP-Protokoll eine Herausforderung darstellen kann. Höhere Kosten: RTK kann teurer sein als PPK, wenn zusätzliche RTK-Module erforderlich sind oder NTRIP-Servicegebühren anfallen. |
|
PPK |
Keine Kommunikation in Echtzeit erforderlich: RTK erfordert eine Echtzeit-Kommunikation zwischen der Drohne und der Bodenstation, um Korrekturdaten von der Referenzstation zu erhalten. PPK hingegen erfordert keine Echtzeit-Kommunikation, da die Korrekturdaten später bei der Nachbearbeitung angewendet werden. Mehr Flexibilität: Bei PPK fliegt die Drohne entlang der Flugroute und sammelt Daten. Die Nachbearbeitung kann später erfolgen, was eine größere Flexibilität bei der Datenerfassung bietet, insbesondere in Gebieten mit begrenzter oder fehlender Mobilfunkabdeckung. Höhere Genauigkeit: Obwohl sowohl RTK als auch PPK eine hohe Genauigkeit liefern können, ist die Genauigkeit bei PPK sogar noch höher, da es während der Datenerfassung nicht zu möglichen Kommunikationsverzögerungen oder -unterbrechungen kommt. Bei der Nachbearbeitung kann PPK auch auf mehr Referenzstationen zurückgreifen, was die Genauigkeit weiter verbessern kann. Niedrigere Kosten: PPK kann preiswerter sein als RTK, weil es keine Echtzeit-Kommunikation erfordert, für die zusätzliche Ausrüstung und Anschlussgebühren erforderlich sein können. |
Längere Nachbearbeitungszeit: Bei PPK müssen die Daten nachbearbeitet werden. Das kostet Zeit und kann die Lieferung des Endergebnisses verzögern.
Anforderungen an die minimale Flugdauer: Voraussetzung für genaue Positionsdaten ist die Erfassung einer ausreichenden Anzahl von GNSS-Datenpunkten während des Fluges. Um genaue Positionsdaten zu erhalten, ist es notwendig, während des Fluges genügend GNSS-Datenpunkte zu erfassen. Die genaue Dauer und Entfernung hängt von verschiedenen Faktoren ab, z. B. dem verwendeten GNSS-Empfänger, der Qualität der Referenzstationsdaten und der Flugumgebung. Im Allgemeinen wird eine Mindestflugdauer von 10 Minuten empfohlen, um genügend GNSS-Datenpunkte für eine präzise PPK-Verarbeitung zu erfassen. Dies kann jedoch je nach den spezifischen Anforderungen des Kartierungsprojekts und der Qualität der gesammelten GNSS-Daten variieren. |
Die Wahl von PPK oder RTK für ein Kartierungsprojekt hängt letztendlich von den spezifischen Anforderungen ab, einschließlich Flexibilität, Kosten und Umfang der Mission. Obwohl beide Methoden ihre Vor- und Nachteile haben, zeichnen DJI Enterprise-Drohnen für RTK immer Satellitenbeobachtungsdaten auf. Damit wird sichergestellt, dass man auch dann, wenn die Echtzeit-Kommunikation während eines RTK-Flugs durch eine instabile Mobilfunkumgebung unterbrochen wird, die Daten der Basisstation abrufen und die PPK-Methode als Backup einsetzen kann, um zentimetergenaue Daten zu erhalten.
Vorbereitung der Hardware und Software für PPK
|
UAV- und Payload-Hardware (eine der verfügbaren Optionen) |
Matrice 300 RTK + Zenmuse P1 |
|
Software zur Planung von Flugeinsätzen |
DJI Pilot 2 app |
|
Quelle für die Datei Base Receiver Independent Exchange (RINEX) und Navigationsdateien |
DJI D-RTK 2 Basis-Station |
| Spezialisierte PPK-Software (eine der verfügbaren Optionen) |
Propeller Aero |
| Photogrammmetrie-Software |
DJI Terra |
Allgemeiner Workflow
Die Durchführung eines PPK-Prozesses mit Drohnenbilddaten mag zunächst kompliziert erscheinen, ist aber eigentlich ein einfacher Prozess, der sorgfältige Planung und Ausführung erfordert. Der Prozess umfasst mehrere wichtige Schritte, die in den folgenden Anleitungen näher erläutert werden.
- Einstellungen und Vorbereitungen: Bevor Sie mit dem Sammeln von Drohnendaten beginnen können, müssen Sie den Einsatz sorgfältig planen. Dabei müssen Sie sicherstellen, dass die Flugdauer lang genug ist und sich vergewissern, dass einige Einstellungen in der DJI Pilot App aktiviert sind. Durch eine sorgfältige Einsatzplanung können Sie sicherstellen, dass Sie genügend Daten für eine genaue PPK-Verarbeitung sammeln.
- Drohnendaten sammeln: Sobald Sie den Einsatz geplant haben, können Sie die Bilddaten der Drohne und die entsprechenden GNSS-Daten des Drohnenempfängers während des Fluges sammeln. Die GNSS-Daten sollten sowohl die Rohdaten des Satellitennavigationssystems als auch Zeitstempelinformationen enthalten. Um eine genaue PPK-Verarbeitung zu gewährleisten, ist es wichtig, so viele Daten wie möglich zu sammeln.
- Referenzdaten sammeln: Zusätzlich zur Erfassung von Drohnendaten müssen Sie auch Referenzdaten von nahegelegenen GNSS-Referenzstationen wie CORS oder anderen bodengestützten Empfängern erfassen. Die Referenzdaten müssen die gleichen GNSS-Signale und Zeitinformationen enthalten wie die GNSS-Daten der Drohne. Indem Sie Referenzdaten sammeln, können Sie sicherstellen, dass Ihre PPK-Ergebnisse so genau wie möglich sind.
- Datenabgleich und PPK-Verarbeitung: Sobald Sie alle erforderlichen Daten gesammelt haben, können Sie die Bilddaten der Drohne anhand der Zeitinformationen mit den entsprechenden GNSS-Daten abgleichen. Dies geschieht mit speziellen Software-Tools, die die Zeitinformationen zwischen der Bildaufnahme und dem GNSS-Datenpunkt abgleichen können. Nach dem Abgleich können Sie die Daten mit spezieller PPK-Software oder Online-Diensten verarbeiten. Die PPK-Verarbeitung verwendet die GNSS-Daten sowohl vom Drohnenempfänger als auch von den Referenzstationen, um die genauen Positionsdaten für jedes während des Fluges aufgenommene Bild zu berechnen.
- Überschreibung der POS-Daten: Vergewissern Sie sich, dass die neuen POS-Daten korrekt in die Photogrammmetrie-Software importiert werden. Dieser Schritt ist sehr wichtig, denn die Genauigkeit der photogrammetrischen Modelle hängt direkt von der Qualität der Eingabedaten ab. Daher ist es notwendig, die Kompatibilität der POS-Daten mit der Software zu überprüfen und sicherzustellen, dass sie korrekt überschrieben werden.
Die Durchführung eines PPK-Prozesses mit Drohnenbilddaten mag zwar komplex erscheinen, ist aber ein notwendiger Prozess, um genaue Kartierungsergebnisse zu erhalten. Durch sorgfältige Einsatzplanung, das Sammeln ausreichender Daten und die Durchführung von Qualitätskontrollen können Sie sicherstellen, dass die Ergebnisse so genau wie möglich sind.
Einstellungen und Vorbereitungen
-
Bevor Sie Ihre Drohne fliegen, ist es wichtig, dass Sie die DJI Pilot 2 App richtig konfigurieren. Hier sind einige Tipps für einen erfolgreichen Flug:
Aktivieren Sie die Option „Mechanical Shutter“ (Mechanischer Verschluss) und deaktivieren Sie die Option „Dewarping“ (Kompensation).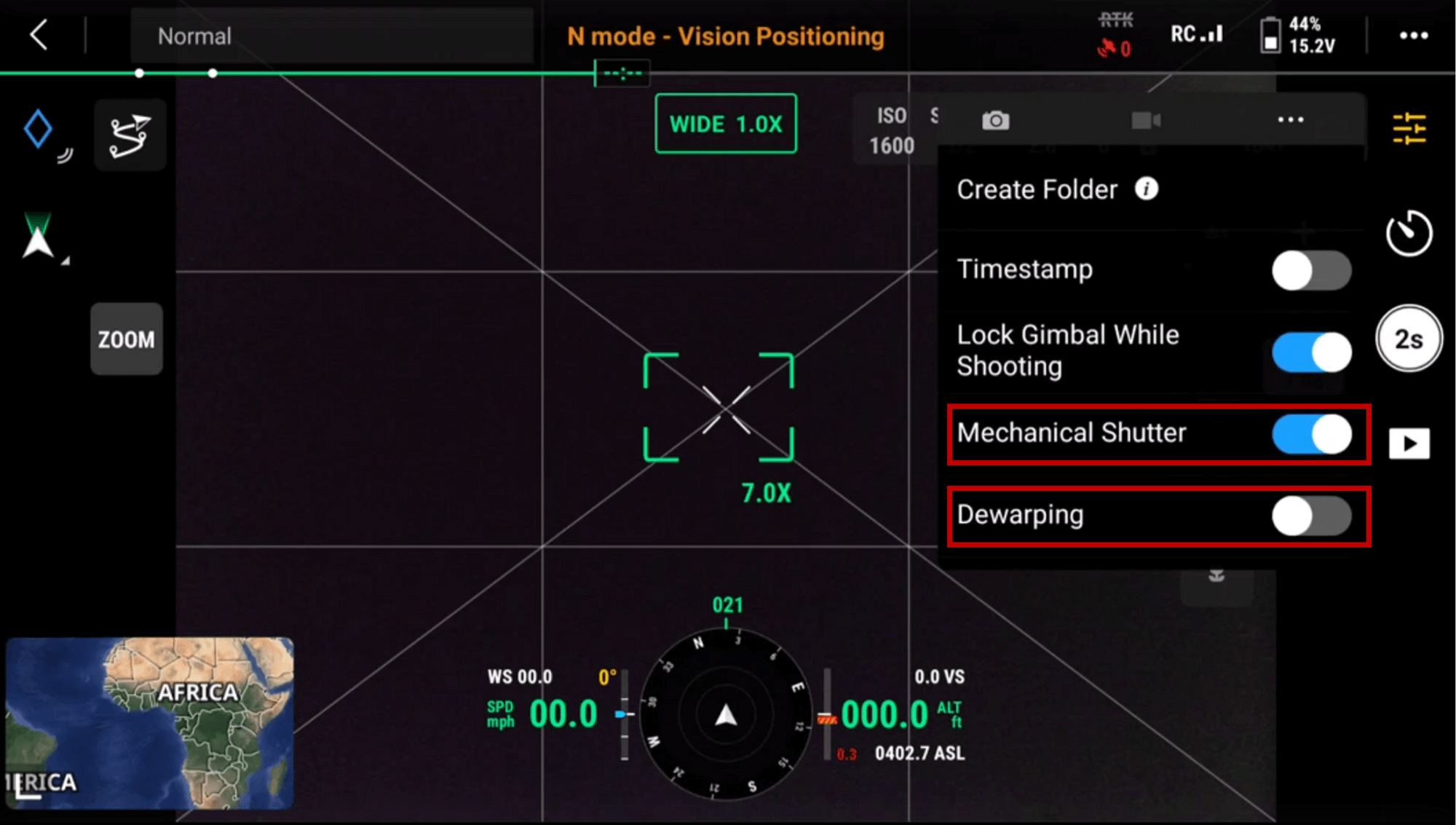
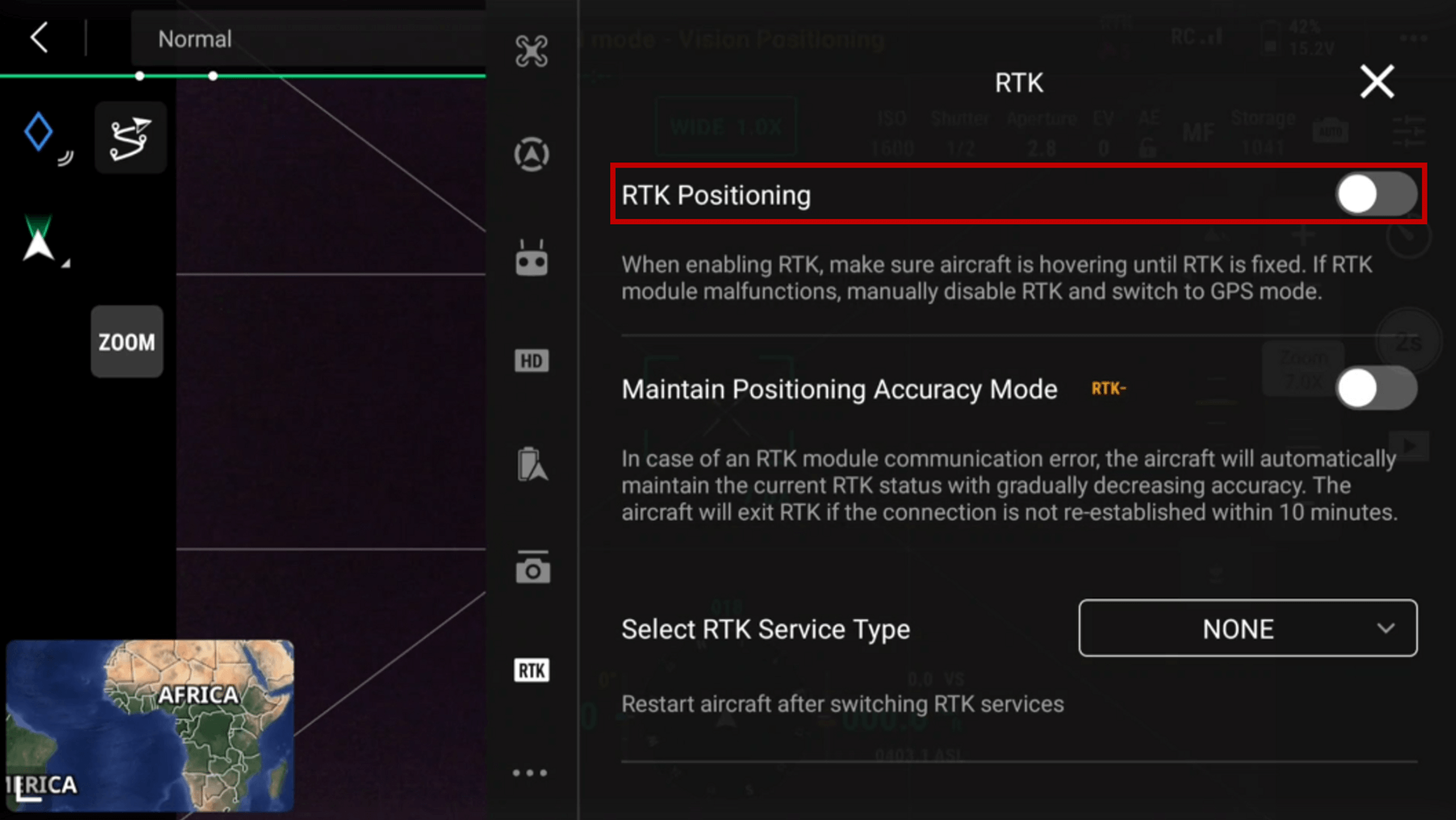
- Vergewissern Sie sich, dass die RTK-Option in den Einstellungen der Pilot-App deaktiviert ist.
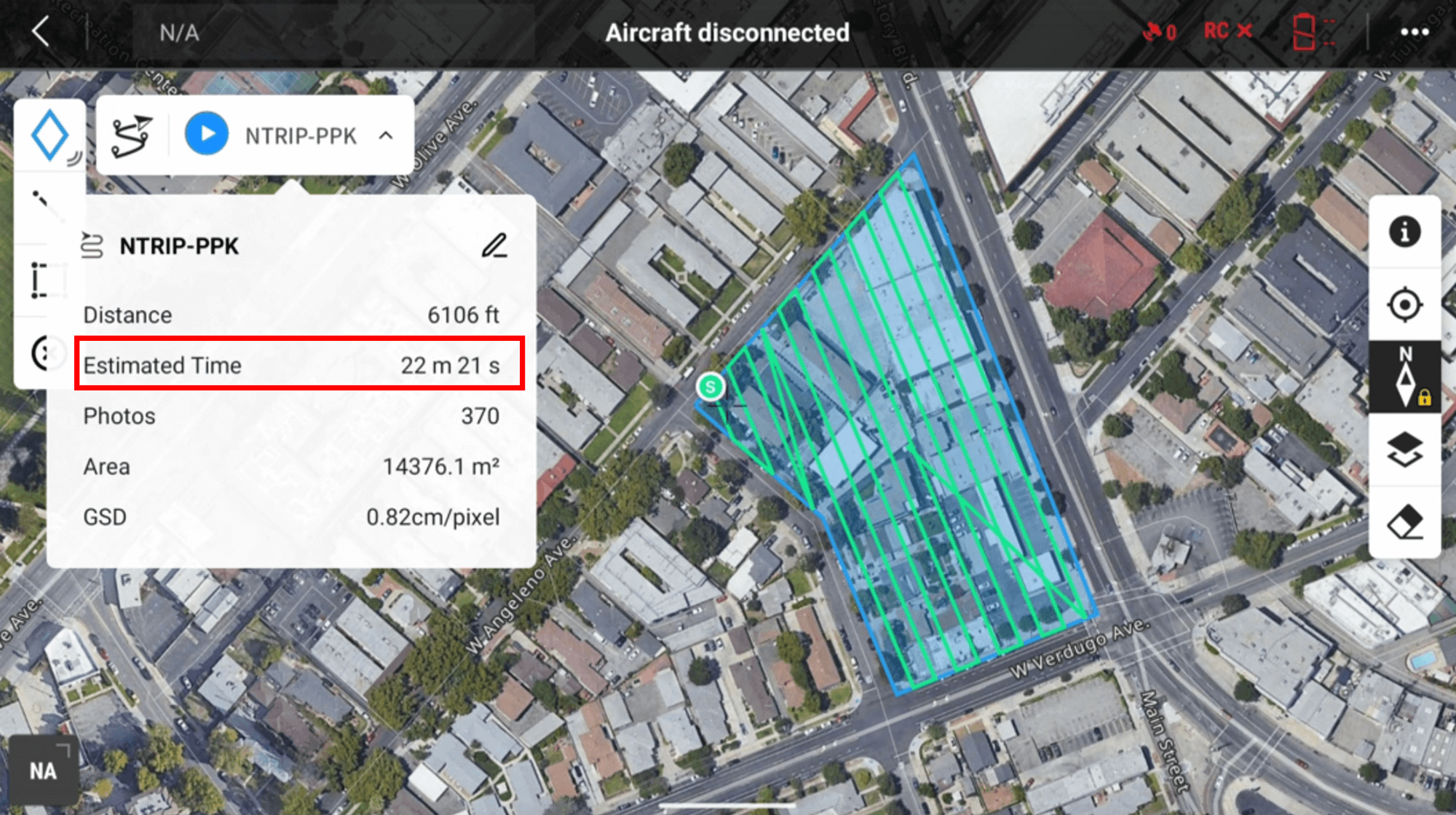
- Beachten Sie unbedingt, dass der PPK-Prozess eine Nachbearbeitung der Daten erfordert, die Zeit in Anspruch nehmen und die Lieferung der Endergebnisse verzögern kann. Außerdem müssen während des Fluges genügend GNSS-Datenpunkte erfasst werden, damit PPK genaue Positionsdaten liefern kann. Die genaue Dauer und Entfernung hängt von verschiedenen Faktoren ab, z. B. dem verwendeten GNSS-Empfänger, der Qualität der Referenzstationsdaten und der Flugumgebung. Im Allgemeinen wird eine Flugdauer von mindestens 10 Minuten empfohlen, um genügend GNSS-Datenpunkte für eine genaue PPK-Verarbeitung zu erfassen. In der Pilot-App können Sie die geschätzte Flugzeit des Einsatzes unter der Dropdown-Registerkarte „Mission overview“ (Einsatzübersicht) überprüfen.
Drohnendaten sammeln
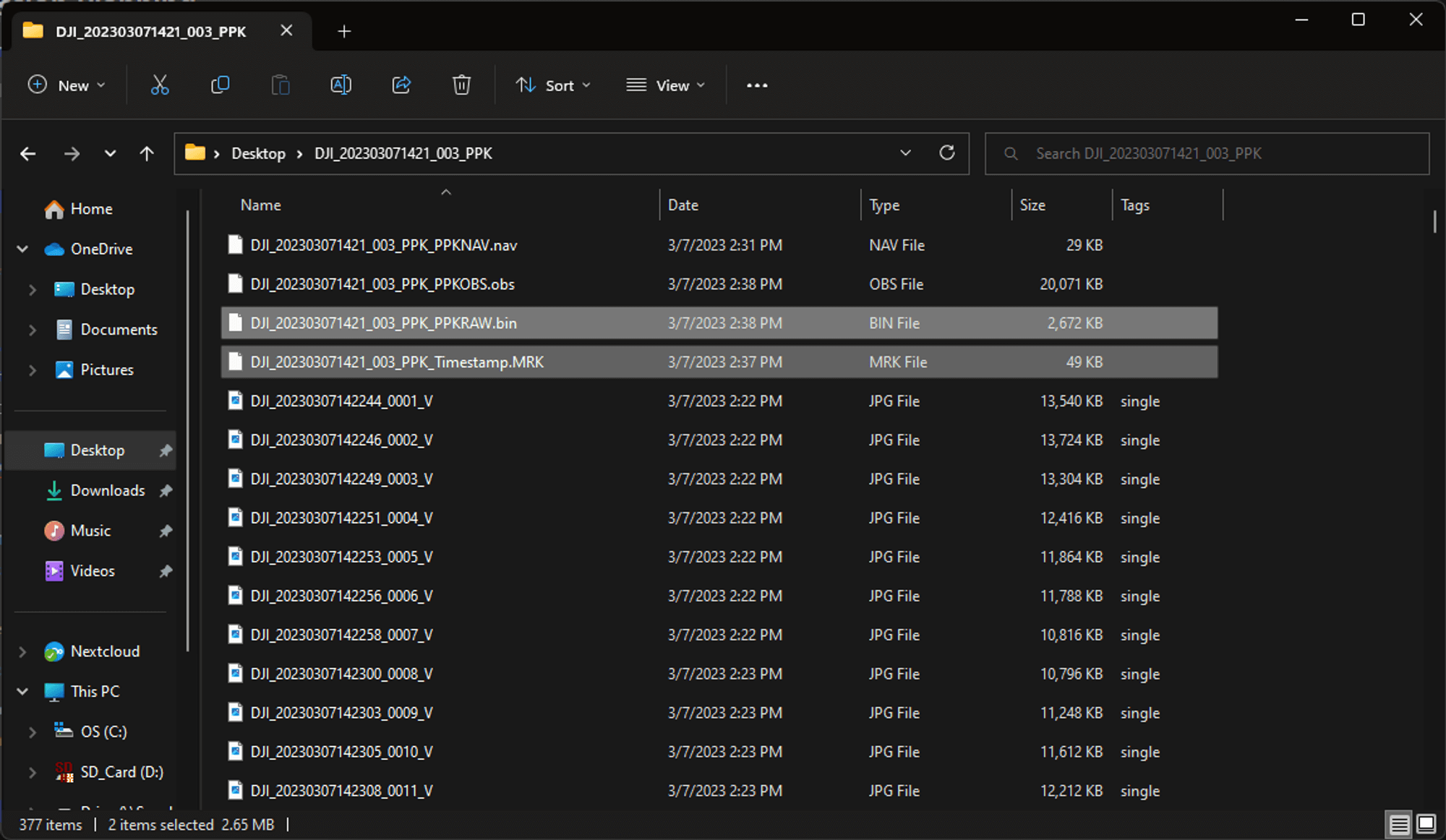
Drohnendaten sind die Grundvoraussetzung für eine korrekte Verarbeitung mit der PPK-Methode. Zusätzlich zu den Rohbildern werden zwei weitere Dateien aus dem Bildordner benötigt: die RINEX-Datei (Drone Receiver Independent Exchange) und die Bildzeitstempel-Datei.
Die RINEX-Datei der Drohne enthält die Rohdaten der GPS-Messungen, die für eine hochpräzise Positionierung entscheidend sind. Mit diesen Daten werden Fehler im GPS-Signal korrigiert, die durch verschiedene Faktoren wie atmosphärische Bedingungen und die Position der GPS-Satelliten entstehen können. Ohne diese Daten wäre die Genauigkeit der PPK-Methode stark beeinträchtigt. Die RINEX-Datei mit der Bezeichnung „XXX_PPKRAW.bin“ befindet sich im Ordner mit den Rohfotos.
Auch die Zeitstempeldatei des Bildes ist für genaue Ergebnisse wichtig. In dieser Datei wird die genaue Aufnahmezeit jedes Bildes aufgezeichnet. Diese Angabe ist für die korrekte Synchronisierung der Bilddaten mit den GPS-Messungen erforderlich. Ohne diese Informationen wäre ein genauer Abgleich der Bilddaten mit den GPS-Daten sehr schwierig, was sich wiederum negativ auf die Genauigkeit der Endergebnisse auswirken würde. Die Zeitstempeldatei mit dem Namen „XXX_Timestamp.MRK“ finden Sie ebenfalls im Ordner mit den Rohfotos.
Damit Sie mit der PPK-Methode die höchstmögliche Genauigkeit erzielen, müssen diese Dateien unbedingt ordnungsgemäß erfasst und verarbeitet werden. Und nur einige wenige DJI Enterprise-Drohnenmodelle, die RTK/PPK unterstützen, können diese Dateien ausgeben:
- DJI M300 RTK (nur mit Zenmuse P1 oder Zenmuse L1 Payloads)
- DJI Mavic 3 Enterprise (nur mit angeschlossenem RTK-Modul)
- DJI Mavic 3 Multispectral (nur mit angeschlossenem RTK-Modul)
- DJI P4 RTK
Referenzdaten sammeln
Für die PPK-Verarbeitung (Post-Processed Kinematic) unter Verwendung einer Basisstation für Referenzdaten benötigen Sie in der Regel zwei Arten von Dateien, die sich auf GNSS-Daten (Global Navigation Satellite System) beziehen: eine RINEX-Basisdatei und eine Navigationsdatei:
- RINEX-Basisdatei: Diese Datei enthält die von der Basisstation gesammelten GNSS-Rohdaten, normalerweise im RINEX-Format. Die RINEX-Basisdatei enthält präzise Messungen von Satellitensignalen, Positionen und Zeitinformationen. Die Datei wird in der Regel zur gleichen Zeit wie der Drohnenflug oder so nah wie möglich an der Flugzeit erfasst. Die RINEX-Basisdatei wird als Referenz verwendet, um die von der Drohne während des Fluges erfassten GNSS-Rohdaten zu korrigieren.
- Navigationsdatei: Diese Datei enthält Informationen über die Position und den Orbit der GNSS-Satelliten, die für das Kartierungsprojekt verwendet werden. Anhand der Navigationsdatei berechnet die PPK-Software die genauen Positionsdaten für jedes während des Drohnenflugs aufgenommene Bild. Die Navigationsdatei kann von verschiedenen Quellen bezogen werden, unter anderem von Regierungsbehörden wie dem US National Geodetic Survey (NGS) oder Online-Diensten wie dem International GNSS Service (IGS).
In diesem Anleitungsabschnitt verwenden wir NGS CORS, um diese GNSS-Dateien als Beispiel zu erhalten:
Um CORS-Referenzdaten mit dem NOAA (National Oceanic and Atmospheric Administration) UFCORS (User Friendly CORS) Service zu sammeln, gehen Sie folgendermaßen vor:
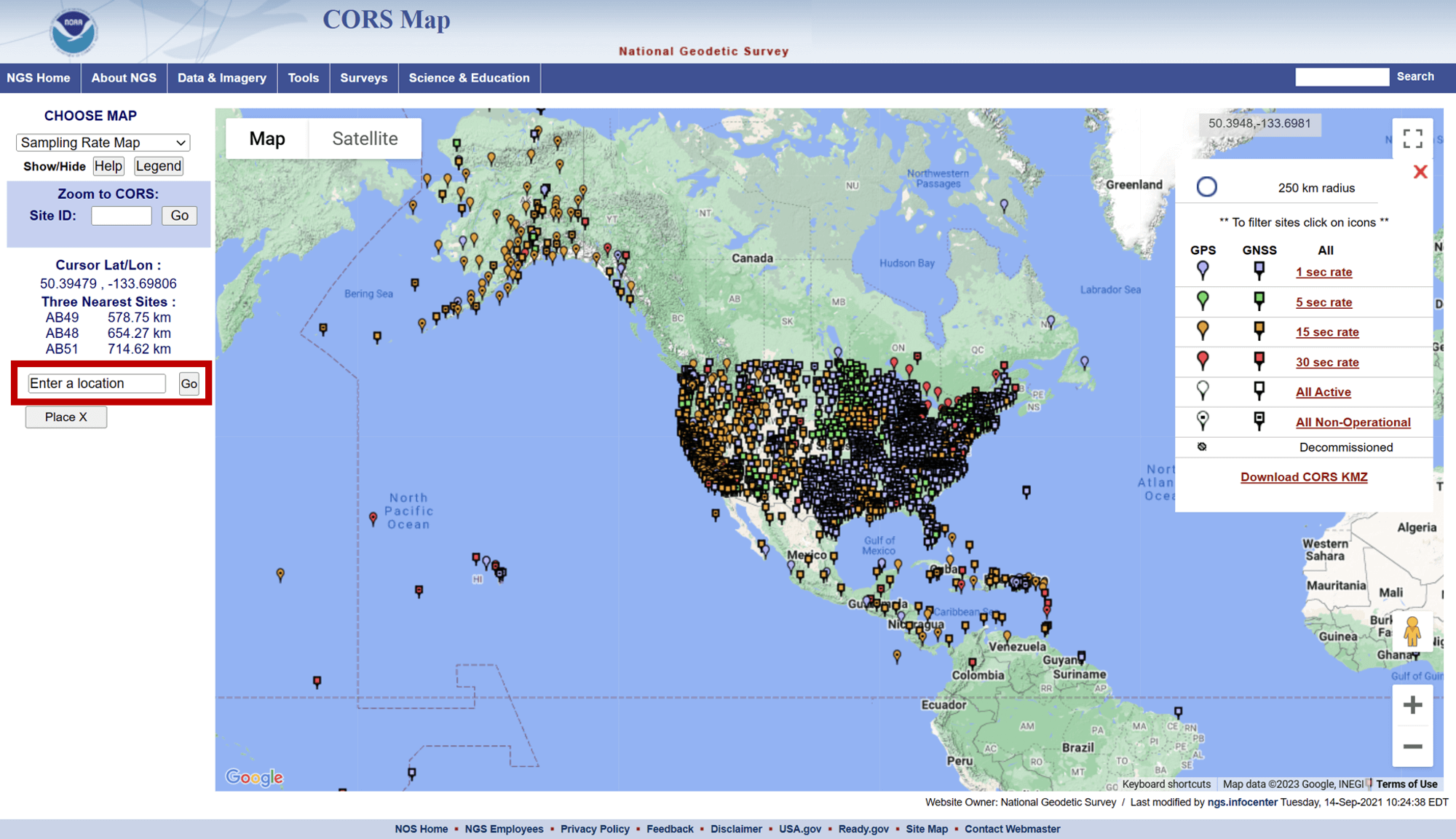
- Rufen Sie die NCN-Website auf und wählen Sie auf der Webseite NCN Map aus.
- Geben Sie die Adresse des Drohnenflugs in das Suchfeld auf der linken Seite ein und wählen Sie „Go“ (Los) aus:
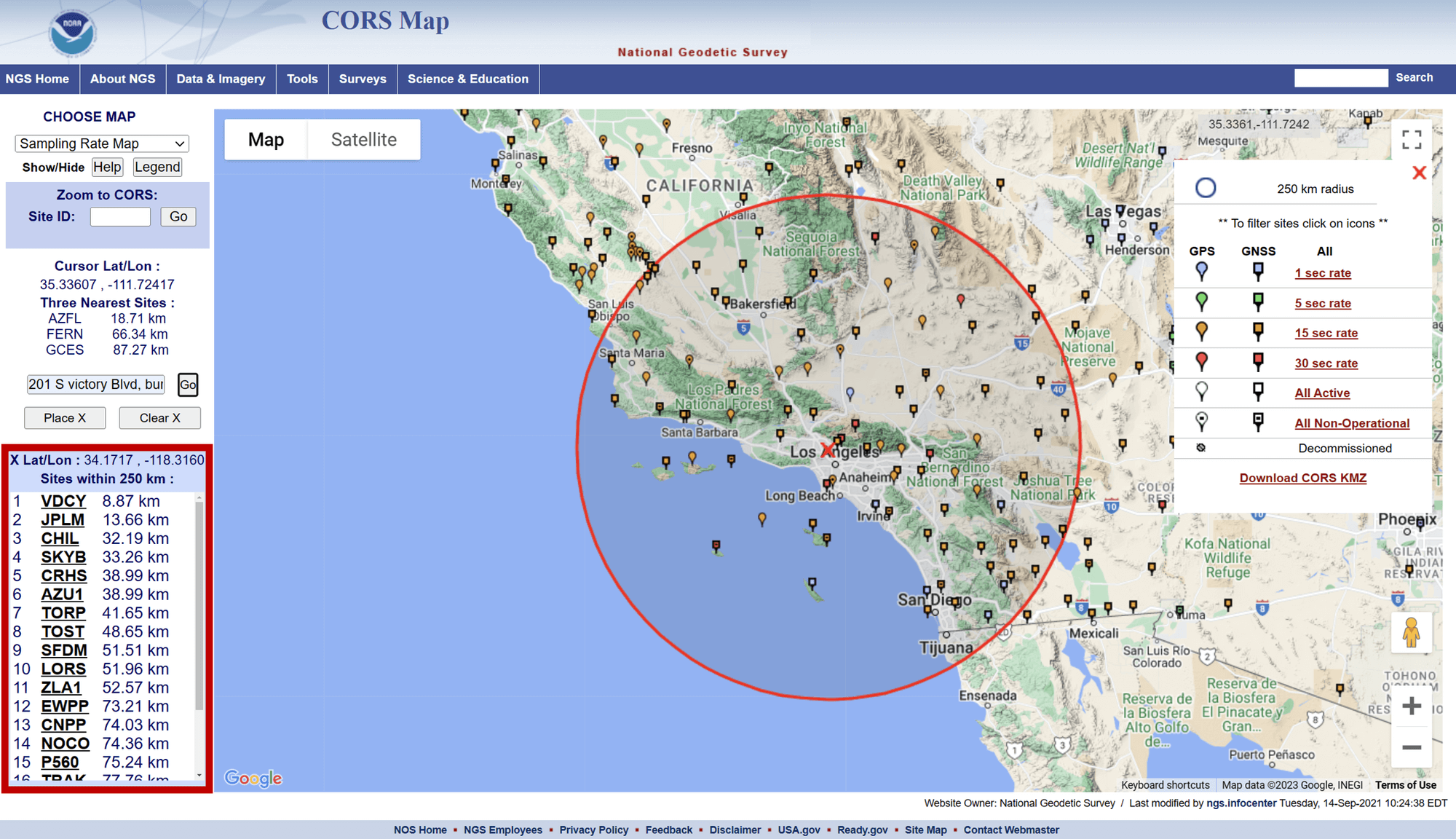
3. Wählen Sie einen Standort mit der kürzestmöglichen Grundlinie (Grundlinie bezieht sich auf den Abstand zwischen der GNSS-Referenzstation und der Drohne. Eine kürzere Grundliniendistanz führt im Allgemeinen zu genaueren PPK-Ergebnissen, da dadurch das Risiko von Fehlern verringert wird, die durch atmosphärische Bedingungen und andere Umgebungsfaktoren verursacht werden.) und notieren Sie den Standortnamen. Der Grundlinienabstand zwischen dem CORS-Standort und der Drohne kann sich auf die Qualität der für den PPK-Prozess verwendeten Referenzdaten auswirken. Ein längerer Grundlinienabstand kann zu mehr Fehlern aufgrund von atmosphärischen und anderen Umweltfaktoren führen, was zu einem weniger genauen PPK-Ergebnis führen kann. Daher wird empfohlen, den Abstand der Grundlinie so kurz wie möglich zu halten, wobei das Kartierungsgebiet dennoch abgedeckt werden muss. Standorte mit einer Grundlinie von mehr als 20 Meilen sind nicht empfehlenswert.
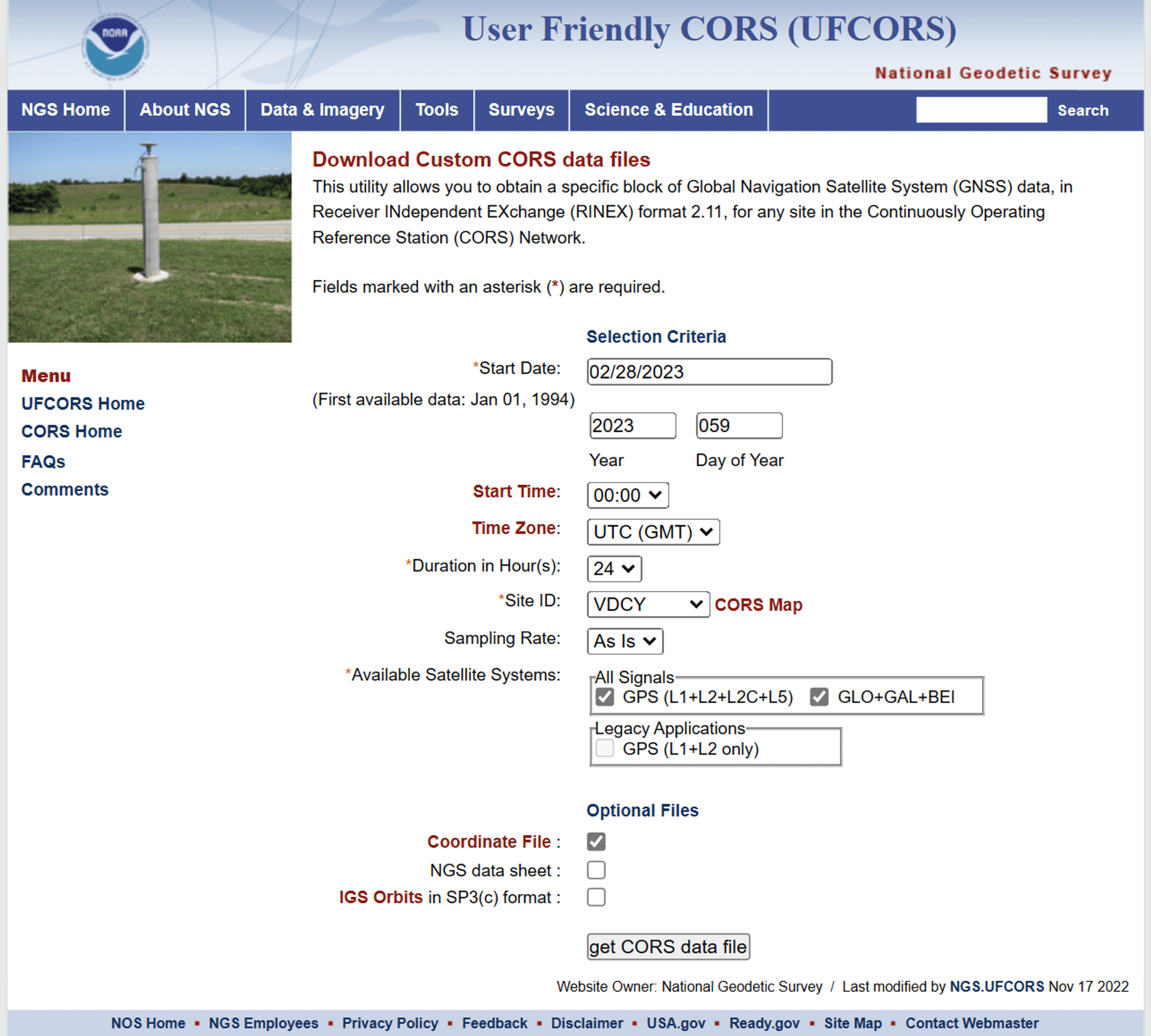
4. Rufen Sie die UFCORS-Website auf und wählen Sie den Datumsbereich für die Daten, die abgerufen werden sollen. Wählen Sie „Get CORS Data file“ (CORS-Datendatei abrufen). Die Daten werden als komprimierte Datei heruntergeladen (z. B. .zip). Vergewissern Sie sich unbedingt, dass die CORS-Daten zur gleichen Zeit wie die Drohnenbilddaten erfasst wurden, um eine genaue PPK-Verarbeitung zu gewährleisten. Sie sollten auch die Qualität der CORS-Daten sorgfältig prüfen, um sicherzustellen, dass sie die erforderlichen Genauigkeitsstandards für das Kartierungsprojekt erfüllen. Eine sorgfältige Planung und Durchführung des Drohneneinsatzes und der CORS-Datenerfassung sind unerlässlich, um eine genaue PPK-Verarbeitung und hochwertige Kartierungsergebnisse zu gewährleisten.
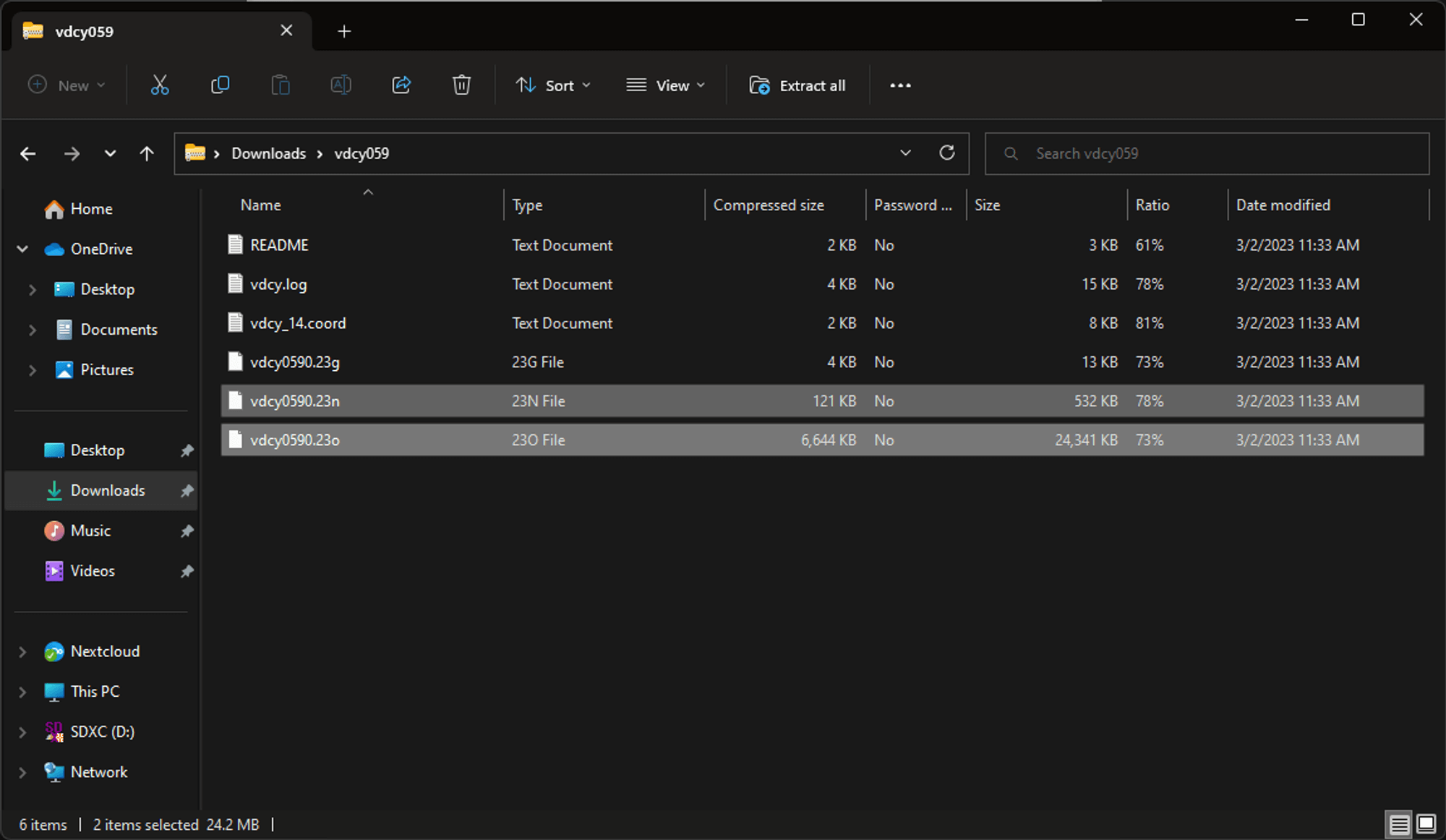
5. Öffnen Sie die heruntergeladene ZIP-Datei und vergewissern Sie sich, dass die ZIP-Datei die folgenden beiden Dateien enthält: xxx.xxo (RINEX-Basisdatei) und xxx.xxn (Navigationsdatei).
Wenn sich keine NGS CORS-Basisstation in der Nähe des Drohneneinsatzortes befindet, ist die DJI D-RTK 2 Mobile Station eine gute Alternative, um Basisstationsdaten für die PPK-Verarbeitung zu erhalten. Um sie zu verwenden, stellen Sie die Basisstation einfach über einem bekannten Punkt gemäß WGS84-Koordinaten und ellipsoidischer Höhe in Metern auf. Verschieben Sie dann den Standort der Basisstation auf der Grundlage der bekannten 3D-Punktkoordinaten in der Pilot 2-App.
Richten Sie die D-RTK 2 zunächst vor Ort ein, und warten Sie vor und nach dem Flug einige Minuten, um die gesamte Flugdauer abzudecken. Sie dürfen die D-RTK 2 Basisstation während des Drohnenflugs nicht bewegen oder neigen, da dies aufgrund von Ausrichtungsänderungen die Datenaufzeichnung unterbrechen könnte. Nach dem Flug schließen Sie die Basisstation über ein USB-C-Kabel an einen Computer an und exportieren die nach dem Flug aufgezeichneten RTCM-Dateien (Radio Technical Commission for Maritime) im .dat-Format. Wenn Sie die DJI D-RTK 2 Mobile Station verwenden, können Sie auf zusätzliche Geräte und Servicegebühren verzichten, die für die Echtzeit-Kommunikation erforderlich sein können. Dies macht das PPK-Verfahren kostengünstiger und bietet mehr Flexibilität bei der Datenerfassung, insbesondere in Gebieten mit begrenzter oder fehlender Mobilfunkabdeckung.
Datenabgleich und PPK-Verarbeitung
In diesem Abschnitt wird Schritt für Schritt beschrieben, wie Sie Drohnendaten mit GNSS-Rover-Dateien verwenden, die von NGS CORS, Basisstationen von Drittanbietern oder der DJI D-RTK 2 Mobile Station gesammelt wurden, um den PPK-Prozess einzuleiten. Wir verwenden RedCatch REDToolBox als Beispiel:
1. Öffnen Sie zunächst die RedCatch REDToolBox, und wählen Sie die Option „PPK & Geotagging“ aus.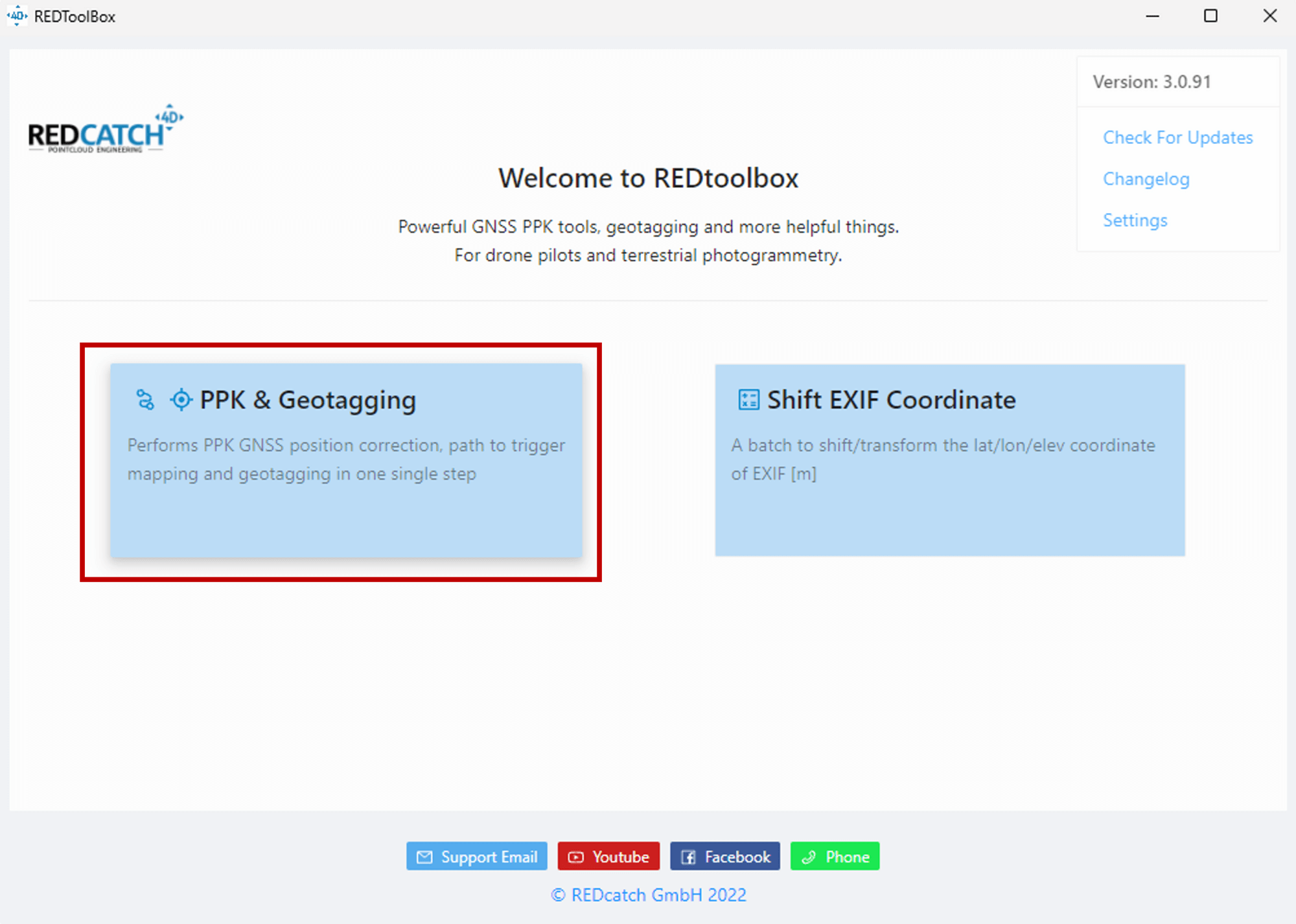
2. Sie werden aufgefordert, DJI als Geräteoption und PDF-Qualitätsbericht und Textdatei als Ausgabeformate auszuwählen. Wählen Sie dann die PPK-Option als Korrekturtyp und Elliptische Höhe (PPK nativ) als Ausgabehöhe. Klicken Sie nach diesen Einstellungen auf „Next“.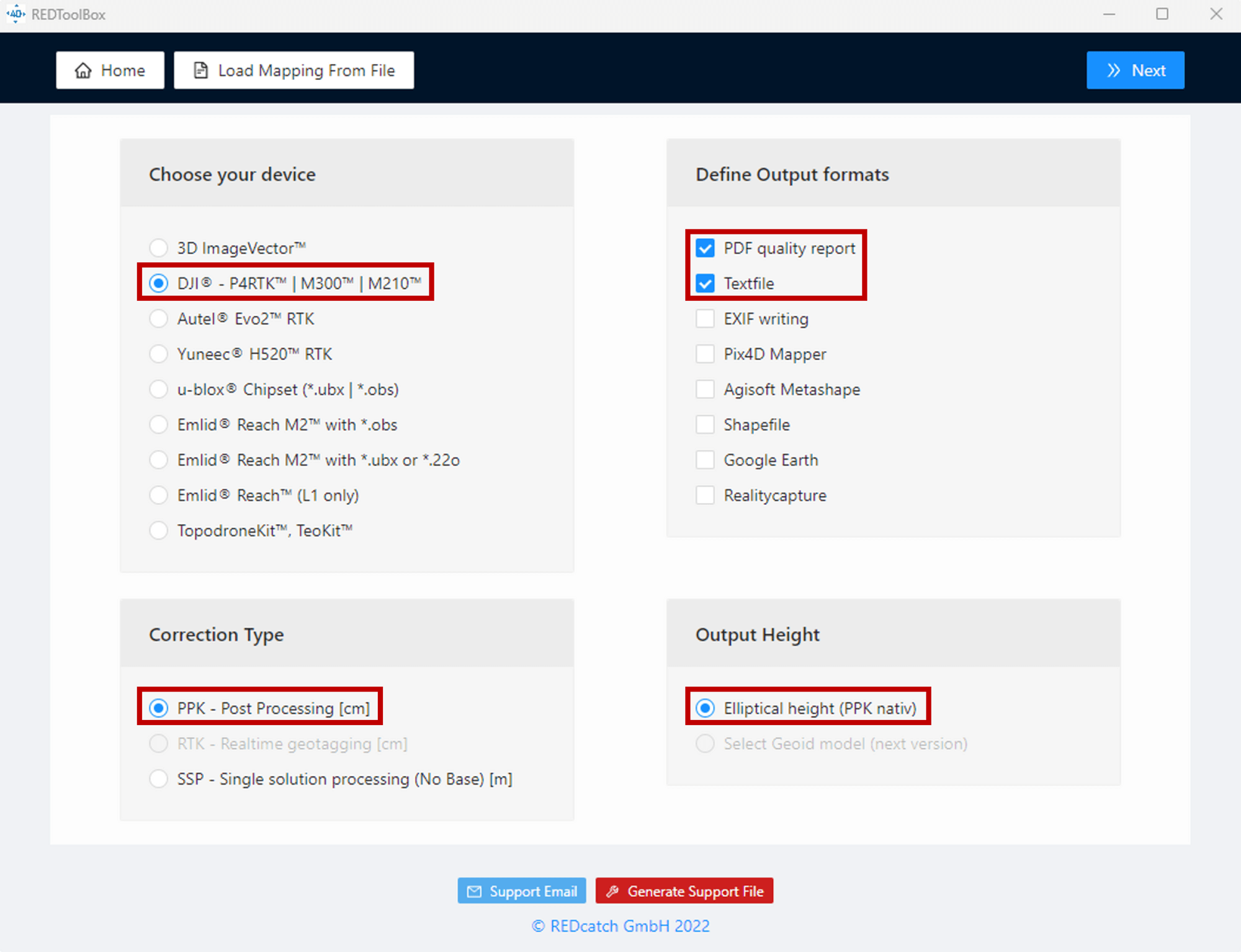
3. Um Bilder zu importieren, öffnen Sie den Abschnitt „Import Images“ (Bilder importieren) und wählen „Select Images“ (Bilder auswählen) aus, um das Verzeichnis für die Rohbilder festzulegen. Auf diese Weise wird sichergestellt, dass die Bilder ordnungsgemäß importiert werden und im PPK-Prozess verwendet werden können.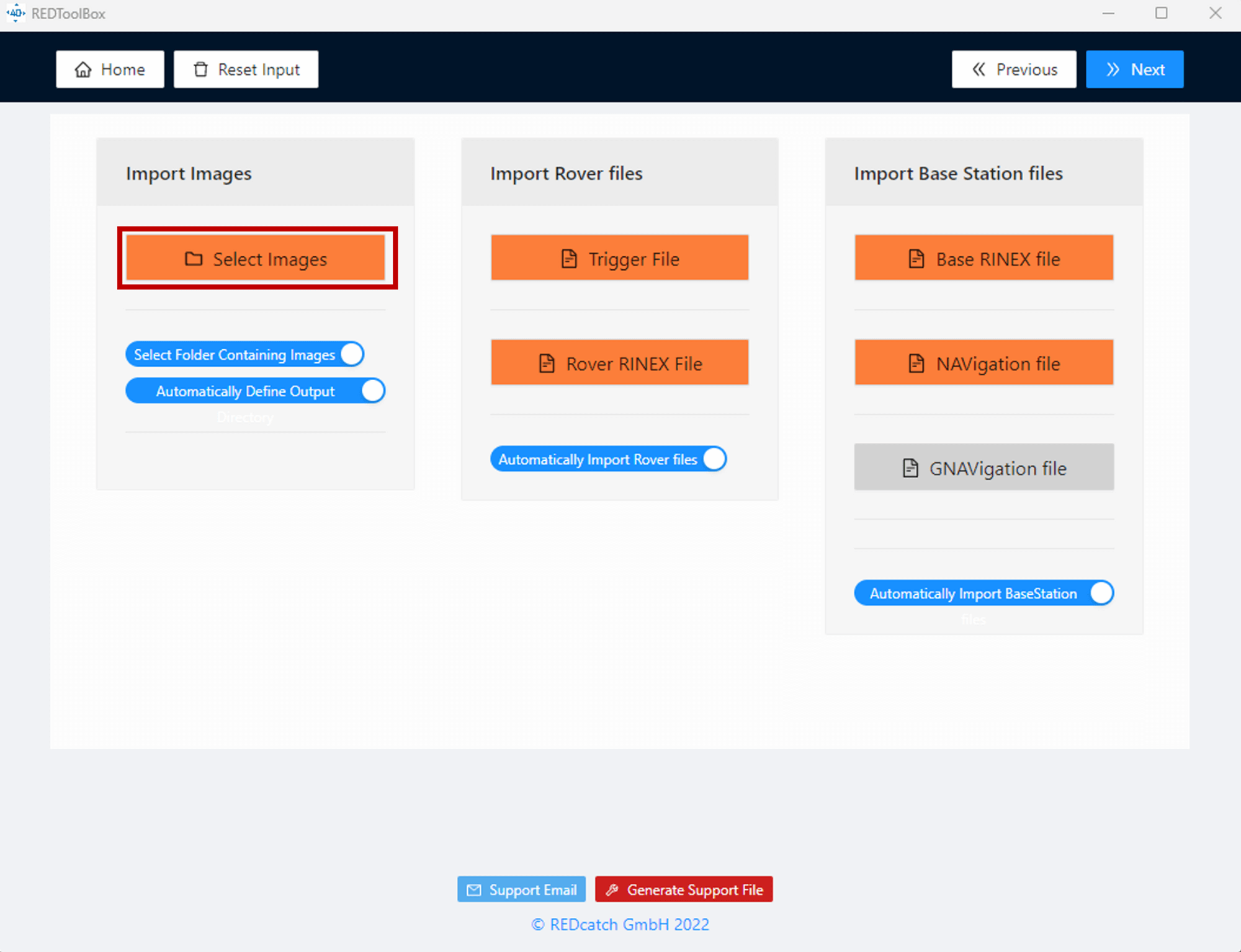
4. Als Nächstes wählen Sie den Abschnitt „Import Rover Files“ (Rover-Dateien importieren) und die Option „Trigger File“ (Trigger-Datei). Hier können Sie die MRK-Datei mit der Bezeichnung „XXX_Timestamp.MRK“ aus dem Ordner mit den Rohbildern importieren. Diese Datei enthält wichtige Informationen über die Zeitstempel der Bilder, die im PPK-Prozess verwendet werden.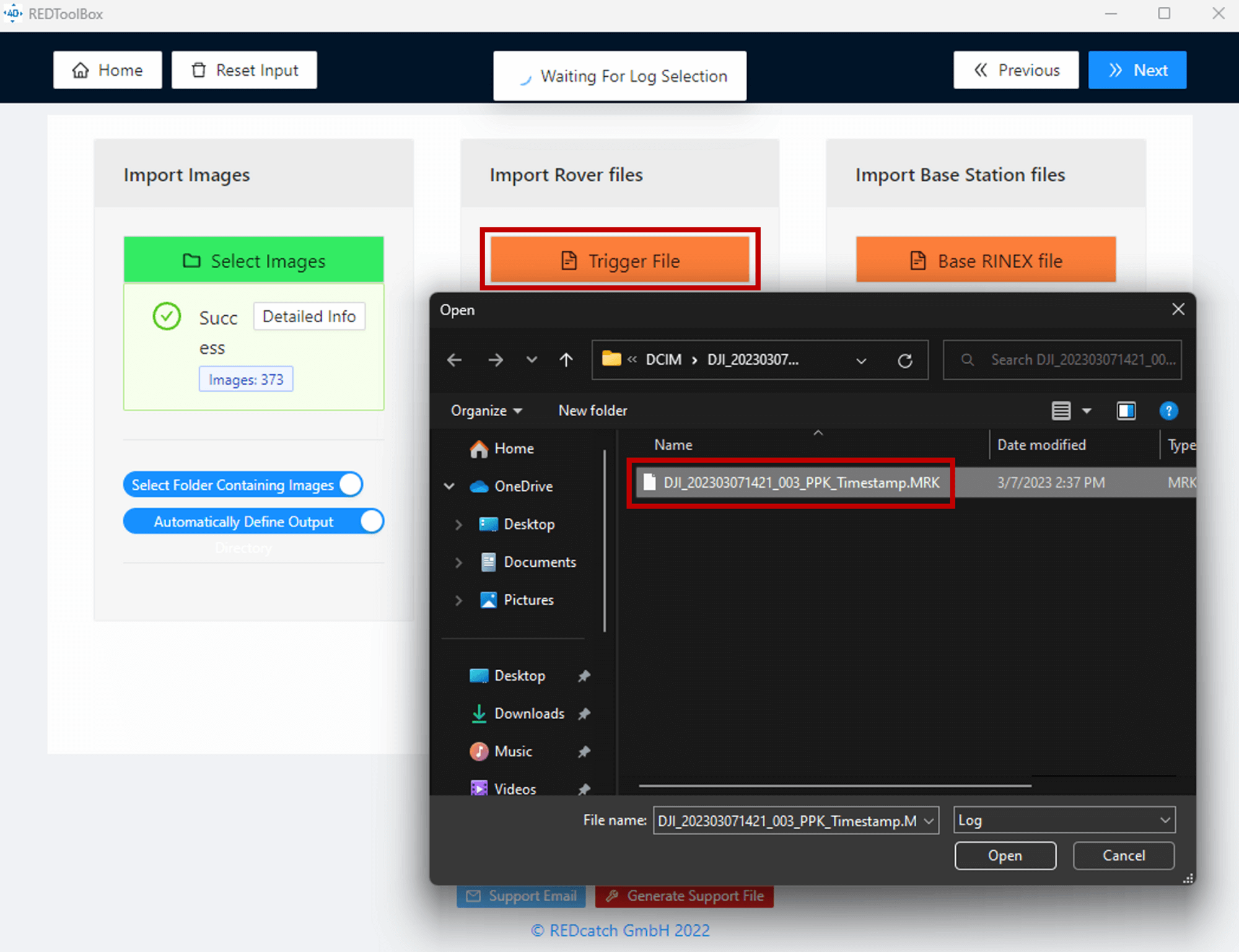
5. Nach dem Importieren der MRK-Datei müssen Sie erneut die Option „Rover RINEX File“ (Rover RINEX-Datei) auswählen und die RINEX-Datei mit der Bezeichnung „XXX_PPKRAW.bin“ im Ordner mit den Rohbildern importieren. Vergewissern Sie sich, dass Sie die richtige Datei auswählen, da dies für den Erfolg des PPK-Prozesses wichtig ist.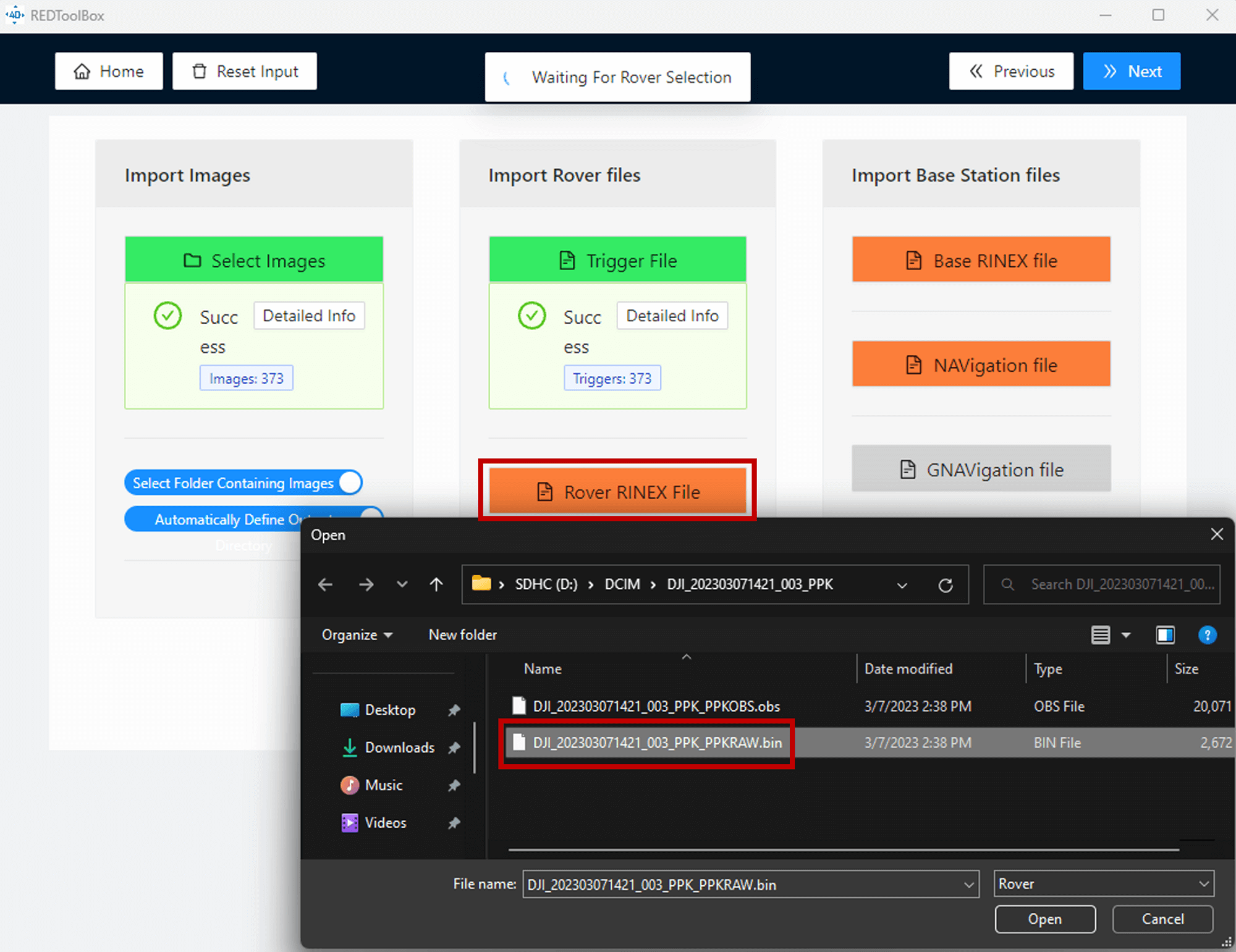
6. Wählen Sie im Abschnitt „Import Base Station Files“ (Basisstationsdateien importieren) die Option „Base RINEX file“ (Basis-RINEX-Datei). Importieren Sie dann die RINEX-Datei mit der Bezeichnung „XXX.xxo“ aus dem Ordner mit den Satellitenrohdaten, die Sie von der UFCORS-Website heruntergeladen haben. Wenn Sie zur PPK-Verarbeitung die DJI D-RTK 2 Mobile Station einsetzen, wählen Sie in dieser Option die .dat-formatierte RTCM-Datei aus und importieren sie. Sie können mehrere RTCM-Dateien im .dat -Format zu einer einzigen Datei zusammenführen, indem Sie das folgende Tool in demselben Verzeichnis ausführen, in dem sich auch die RTCM-Dateien befinden:: merge_bin.bat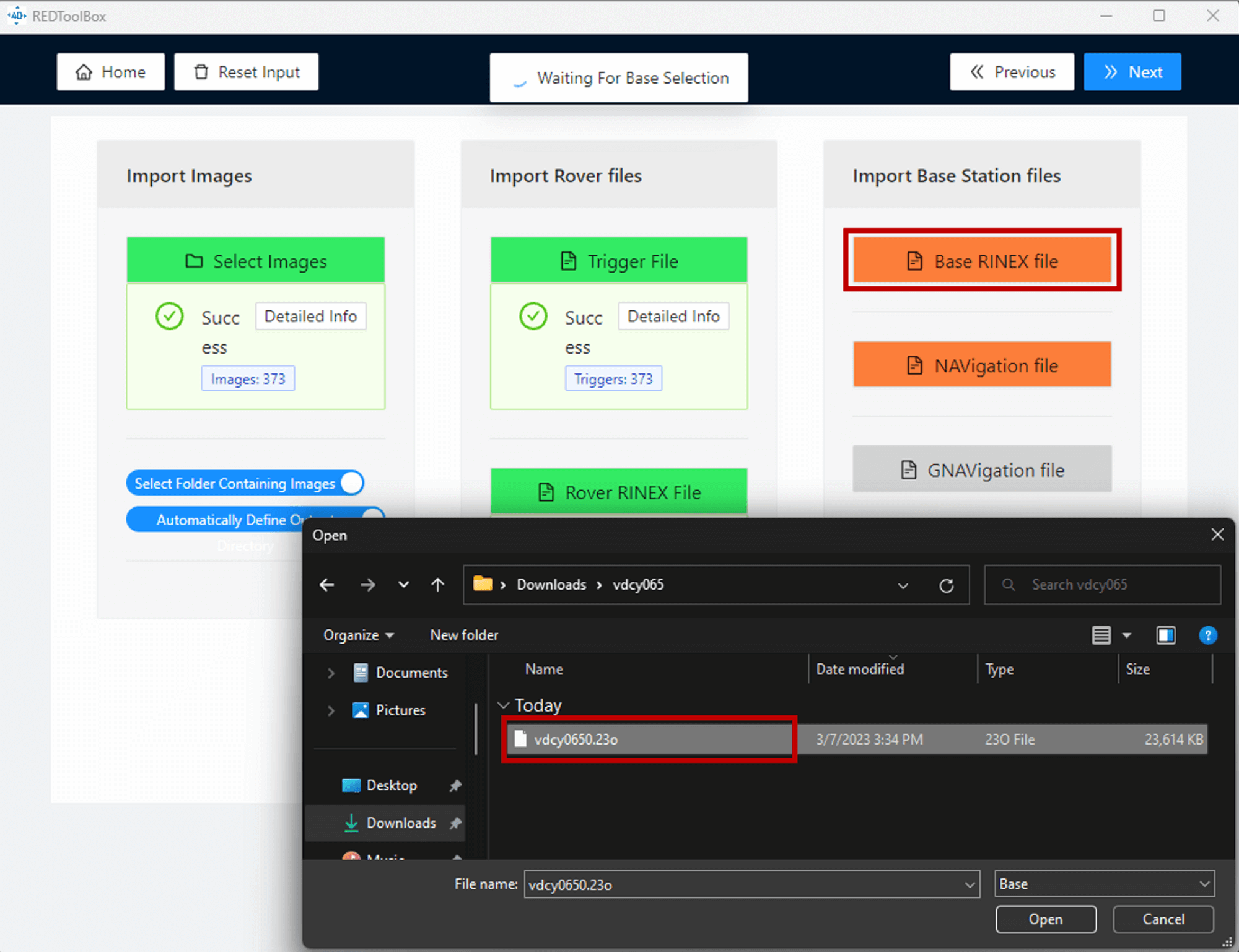
7. Wenn Sie die Datei XXX.xxo aus dem Ordner mit den Satelliten-Rohdaten ausgewählt haben, sollten die Navigations- und Gnebigation-Dateien automatisch importiert werden. Falls nicht, finden Sie diese beiden Dateien im Ordner mit den Satelliten-Rohdaten, den Sie von der UFCORS-Website heruntergeladen haben.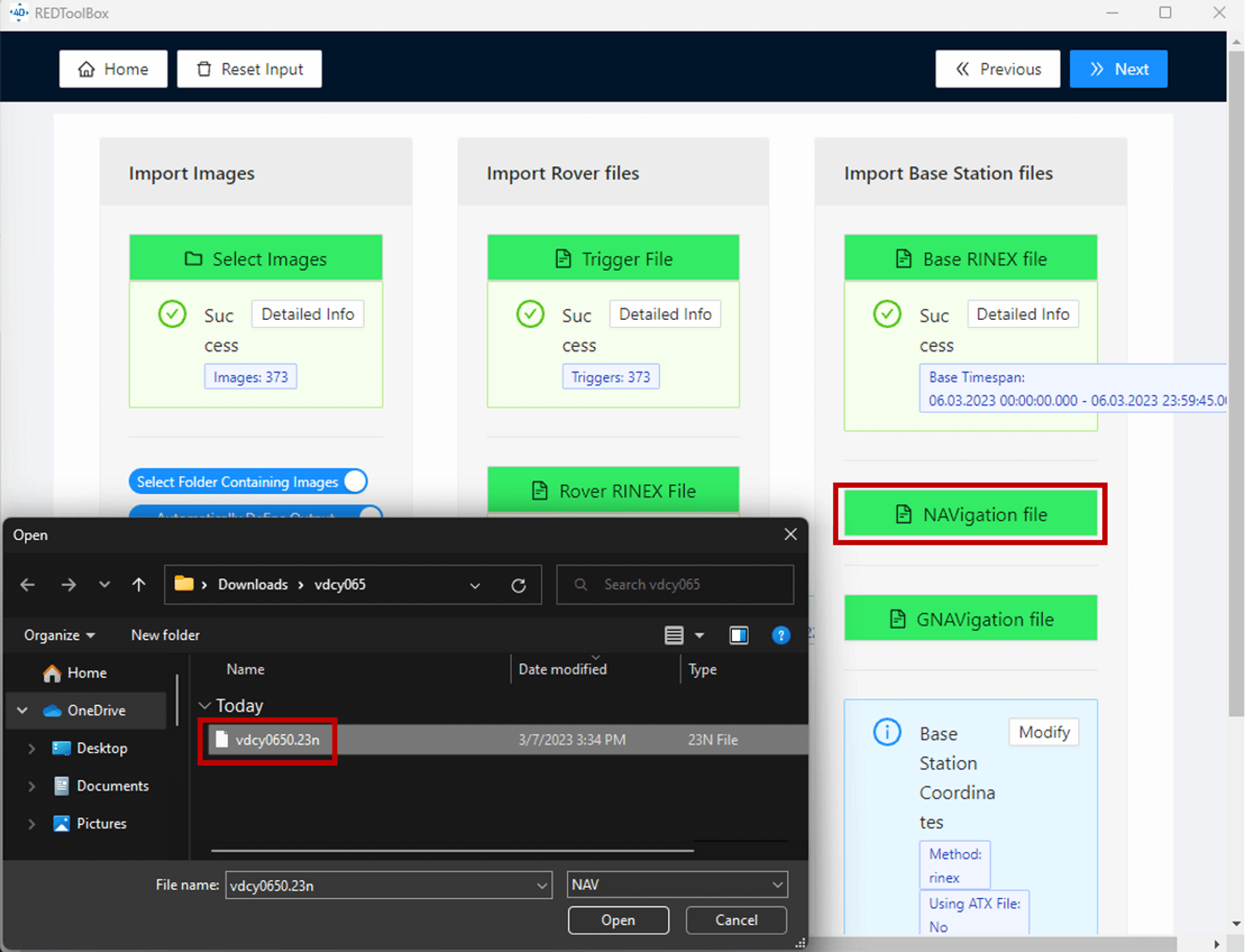
8. Überprüfen Sie abschließend die Kartierungszusammenfassung und wählen Sie „Execute Mapping“ (Kartierung ausführen), um den PPK-Prozess zu starten.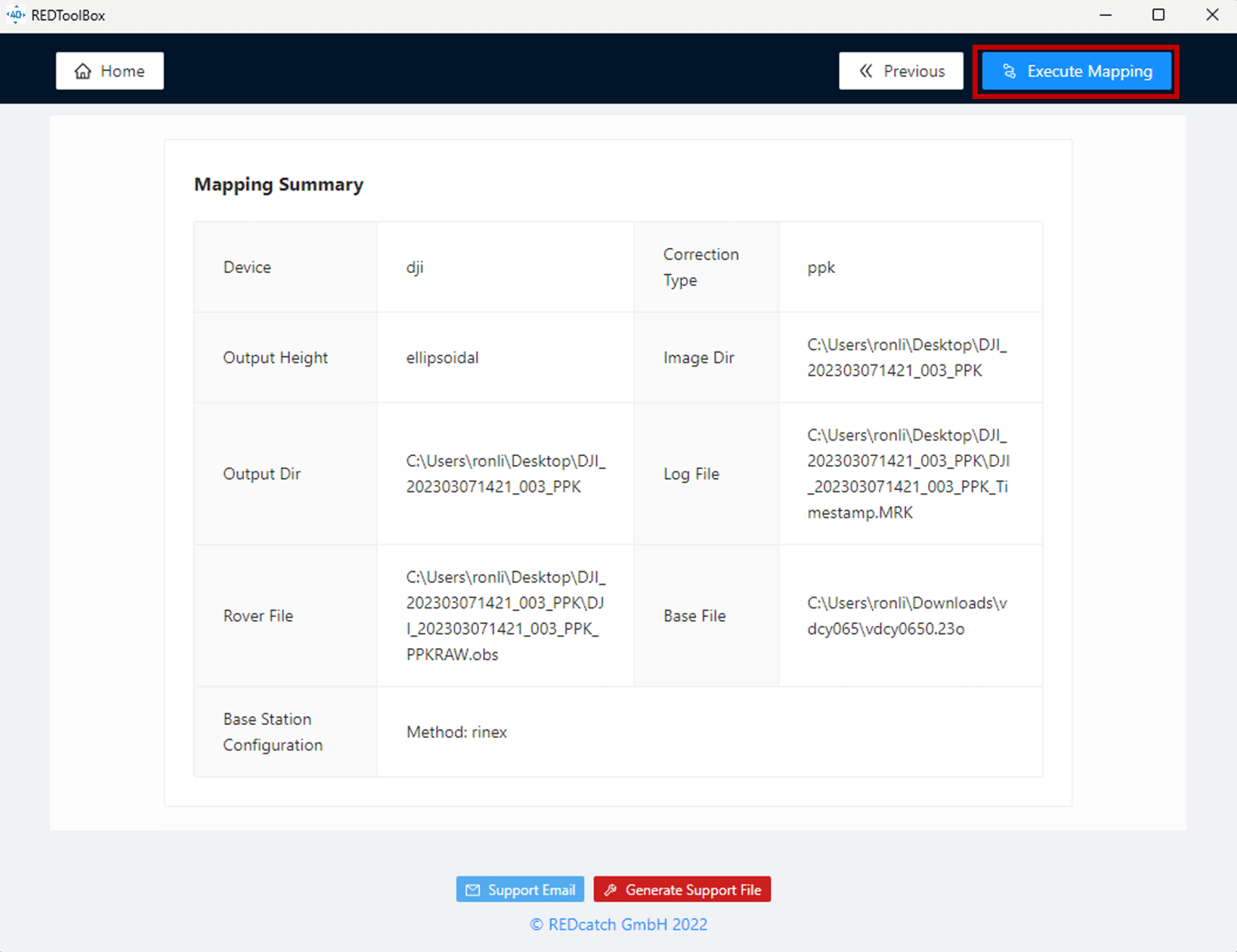
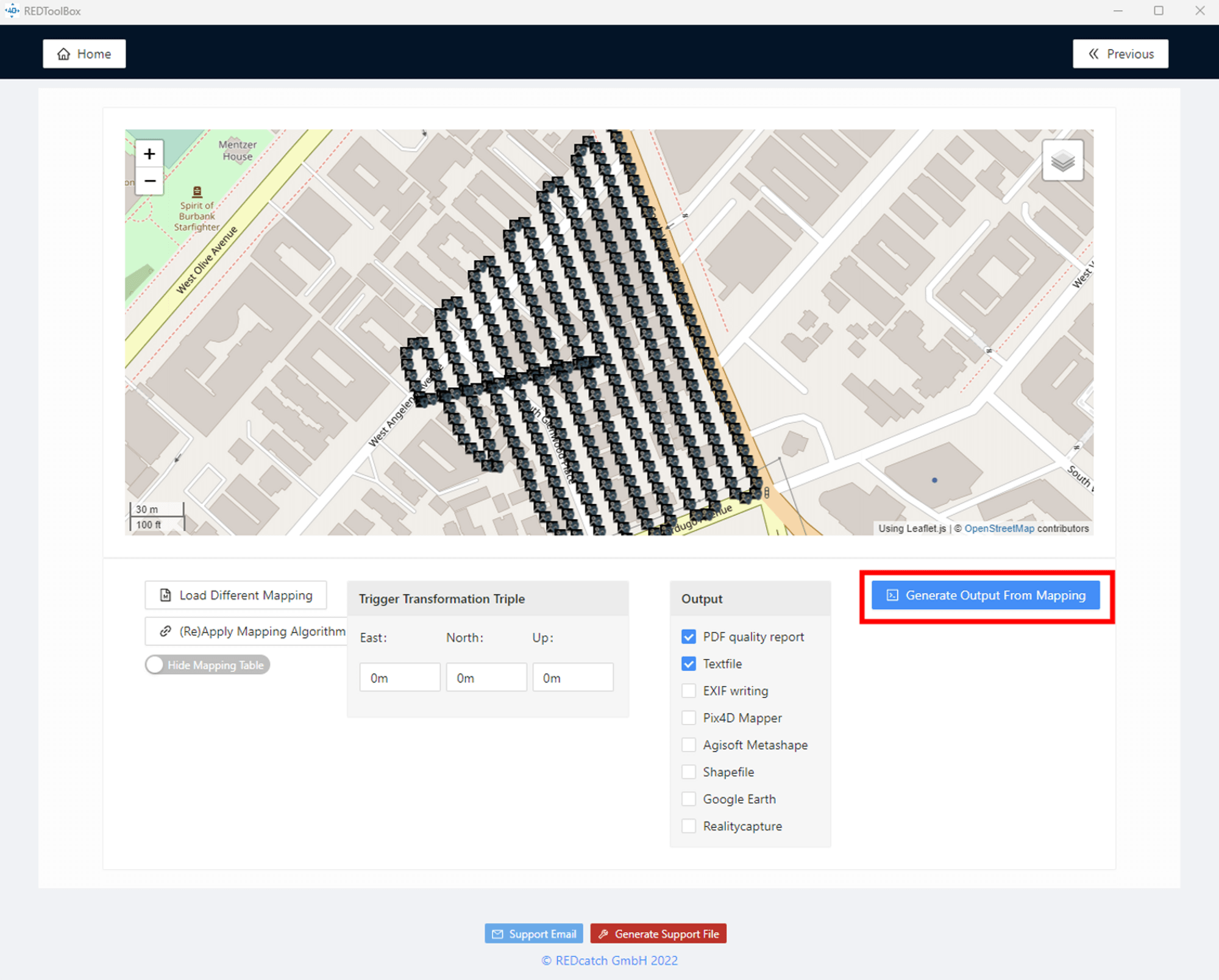
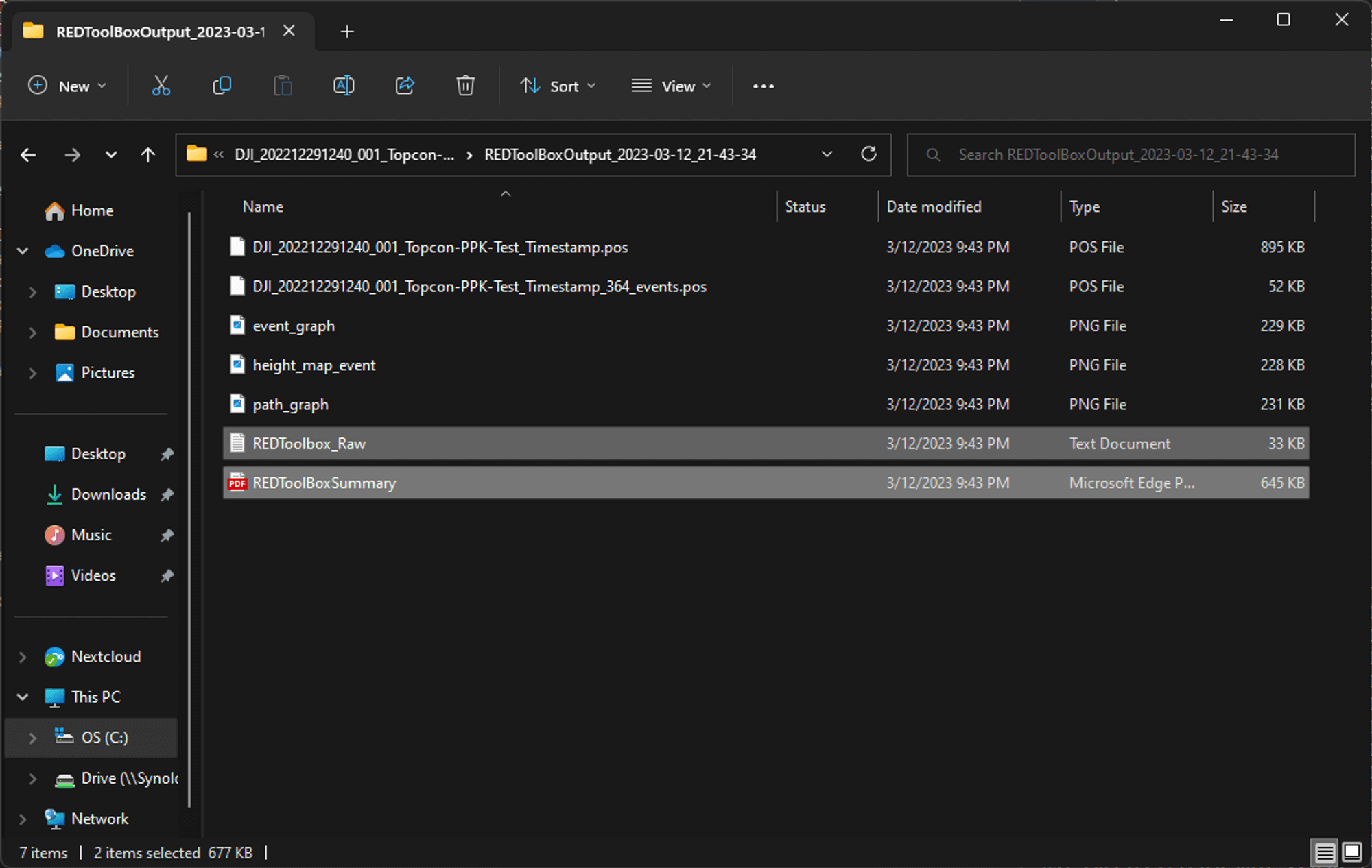
10. Um sicherzustellen, dass sowohl die korrigierten POS-Daten (REDToolbox_Raw.txt) als auch der zusammenfassende Bericht (REDToolBoxSummary.pdf) exportiert werden, öffnen Sie den Ausgabeordner. Später werden wir die erste Zeitstempeldatei mit den korrigierten POS-Daten des Bildes für die photogrammetrische Verarbeitung verwenden.
Überschreibung der POS-Daten
POS-Daten (Position und Orientierung) von Drohnenbildern beziehen sich auf die Informationen über den Standort, die Fluglage und die Flugbahn einer Drohne bei der Aufnahme von Bildern. Diese Daten werden in der Regel mithilfe von GPS und anderen Sensoren an Bord der Drohne gewonnen und zur genauen Georeferenzierung der Bilder und zur Erstellung eines 3D-Modells oder einer Karte des untersuchten Gebiets mithilfe von Photogrammmetrietechniken eingesetzt.
Bei der Photogrammmetrie werden die POS-Daten des Drohnenbildes im Aerotriangulationsprozess verwendet, um die Position und Ausrichtung jedes Bildes im 3D-Raum genau zu bestimmen. Beim Aerotriangulationsprozess werden die relativen Positionen und Ausrichtungen der Bilder auf der Grundlage ihrer Überlappungen und entsprechenden Bildmerkmalen berechnet. Mit den POS-Daten des Drohnenbildes wird die Ausrichtung jedes Bildes im 3D-Raum berechnet, und anhand dieser Informationen wird eine dünn besetzte Punktwolke erzeugt, die das vermessene Gebiet darstellt.
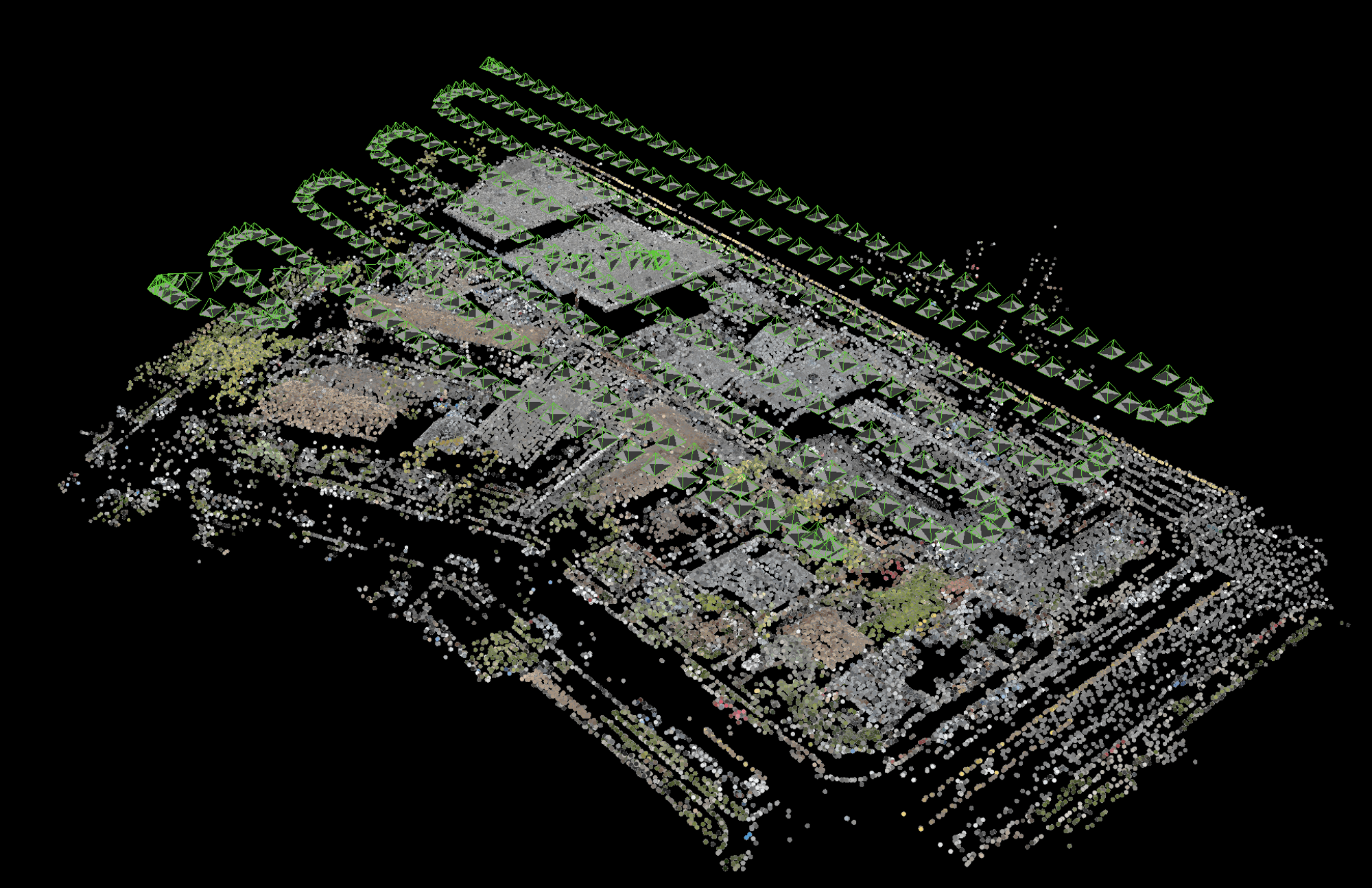 Auf der Grundlage von POS-Bildern generiertes Aerotriangulationsmodell
Auf der Grundlage von POS-Bildern generiertes Aerotriangulationsmodell
Wenn die POS-Daten des Drohnenbildes ungenau oder unpräzise sind, ist auch das Ergebnis der Photogrammmetrie weniger genau. Jegliche Fehler in den POS-Daten des Drohnenbildes können zu Fehlern bei der Aerotriangulation führen, die wiederum Fehler bei der Bündelausgleichung verursachen und letztendlich zu einer weniger genauen Ausgabe führen.
Die Genauigkeit der POS-Daten des Drohnenbildes wirkt sich auf die allgemeine Genauigkeit der Ausgabe während des PPK-Prozesses aus. Der PPK-Prozess korrigiert die POS-Daten der Drohne hinsichtlich eventueller Fehler, die durch GPS-Drift oder Rauschen verursacht wurden, sowie anderer sensorbezogener Fehler. Die daraus resultierenden PPK-korrigierten POS-Daten werden dann verwendet, um eine dichte Punktwolke zu erzeugen, die das vermessene Gebiet repräsentiert und zur Erstellung von 3D-Modellen oder Karten verwendet werden kann. Daher ist es wichtig, sicherzustellen, dass die POS-Daten des Drohnenbildes in der Photogrammmetrie-Prozesssoftware korrekt definiert sind.
Wir verwenden die DJI Terra Software als Beispiel, um die POS-Daten des Bildes anzuwenden und zu überschreiben. Bitte folgen Sie den nachstehenden Schritten oder sehen Sie sich das Video an, um PPK-korrigierte POS-Daten in der Terra Software anzuwenden und zu überschreiben:
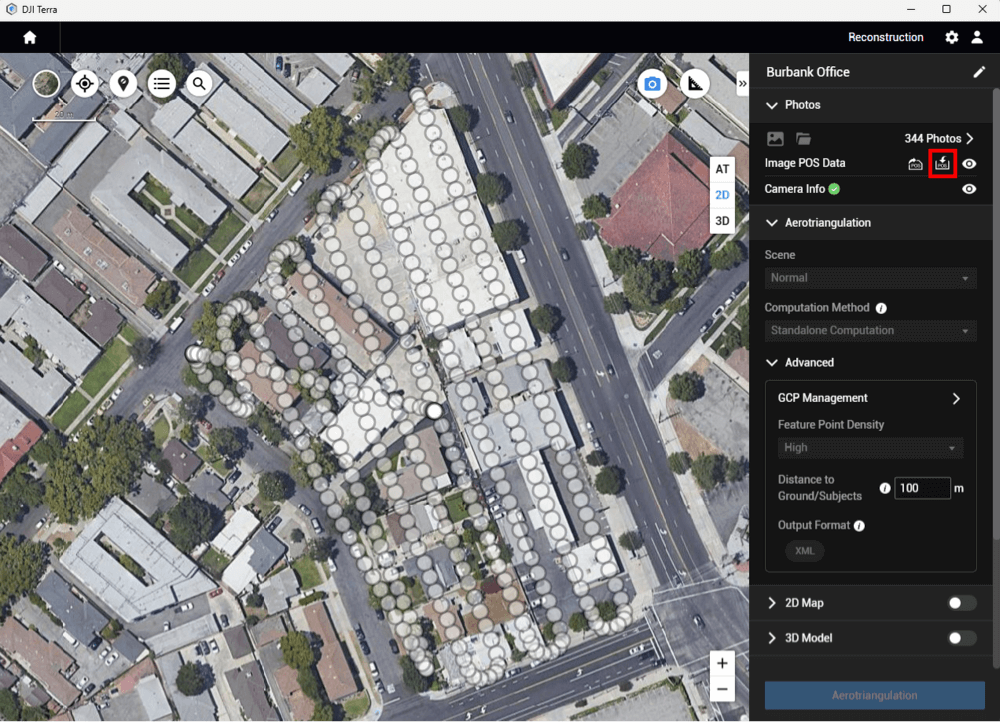
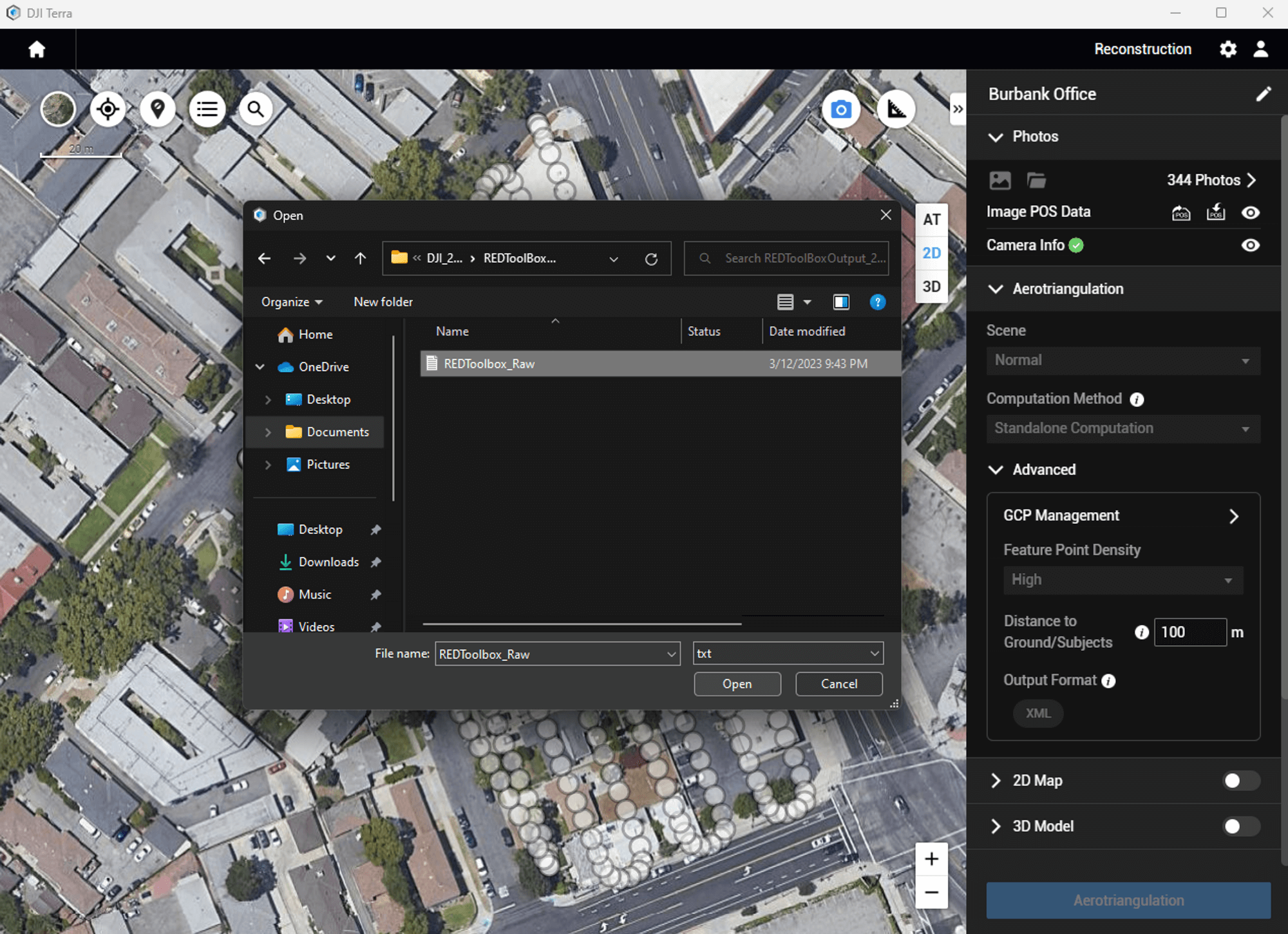
- Öffnen Sie die DJI Terra Software, wählen Sie auf der Registerkarte „Reconstruction“ (Rekonstruktion) die Option „New Mission“ (Neuer Einsatz) und wählen Sie dann „Visible Light“ (Sichtbares Licht), um einen neuen Photogrammmetrie-Rekonstruktionseinsatz zu erstellen. Nachdem Sie alle Fotos importiert haben, wählen Sie die Symboloption „Import POS Data“ (POS-Daten importieren), wie unten dargestellt.
- Importieren Sie unbedingt die verarbeitete POS-Datei im Textformat aus dem letzten Abschnitt.
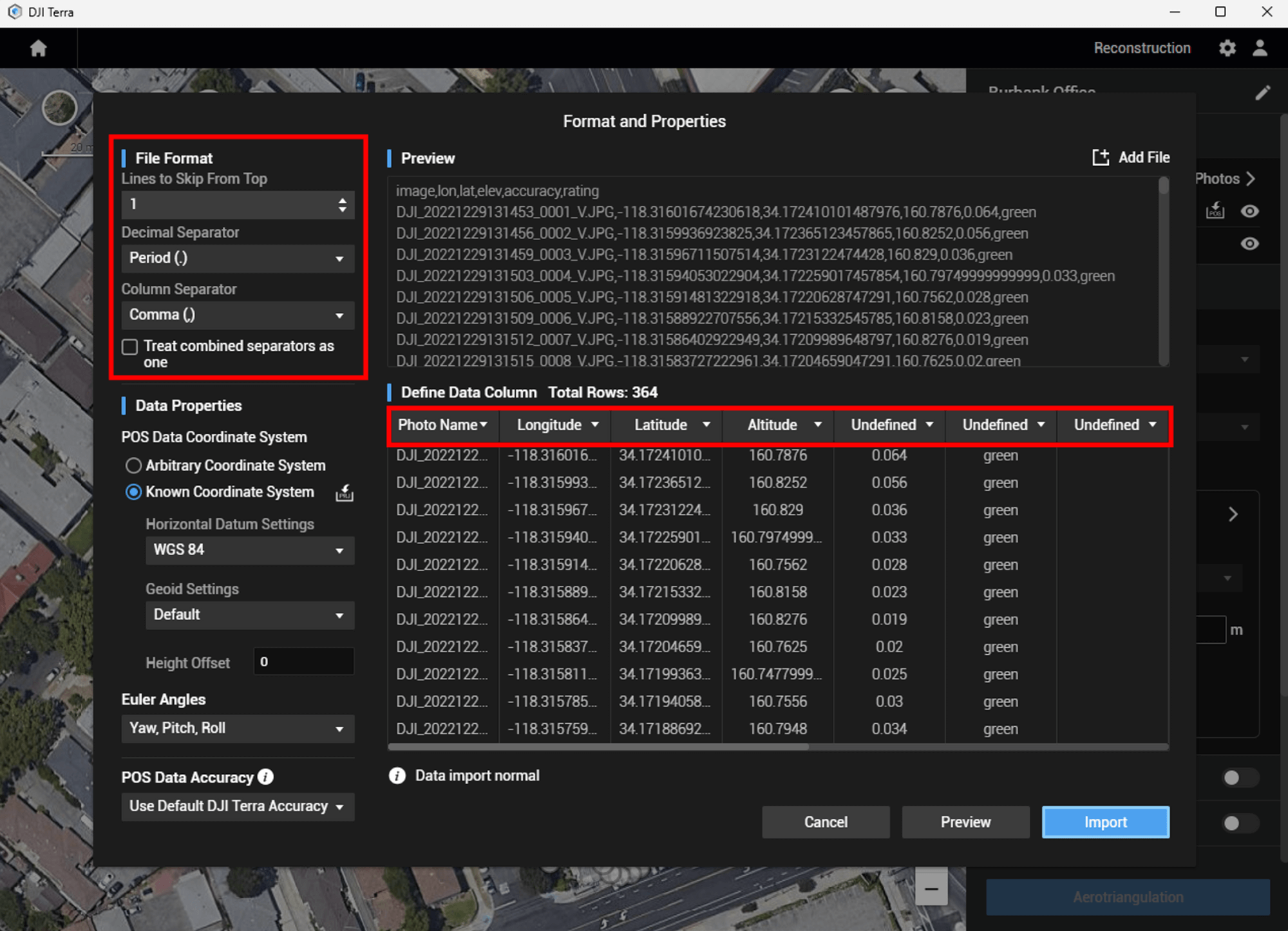
- Nachdem Sie die POS-Daten importiert haben, sollte automatisch das Fenster „Format and Properties“ (Format und Eigenschaften) angezeigt werden. In diesem Fenster passen Sie die Datenspalte an und definieren im Abschnitt „Define Data Column“ (Datenspalte definieren) die Spalteneigenschaften. Vergewissern Sie sich, dass die erste Zeile der Tabelle die POS-Daten des ersten Bildes enthält, und definieren Sie mit den Werkzeugen im Abschnitt „File Format“ (Dateiformat) Datentrennzeichen und die erste Zeile der Daten.
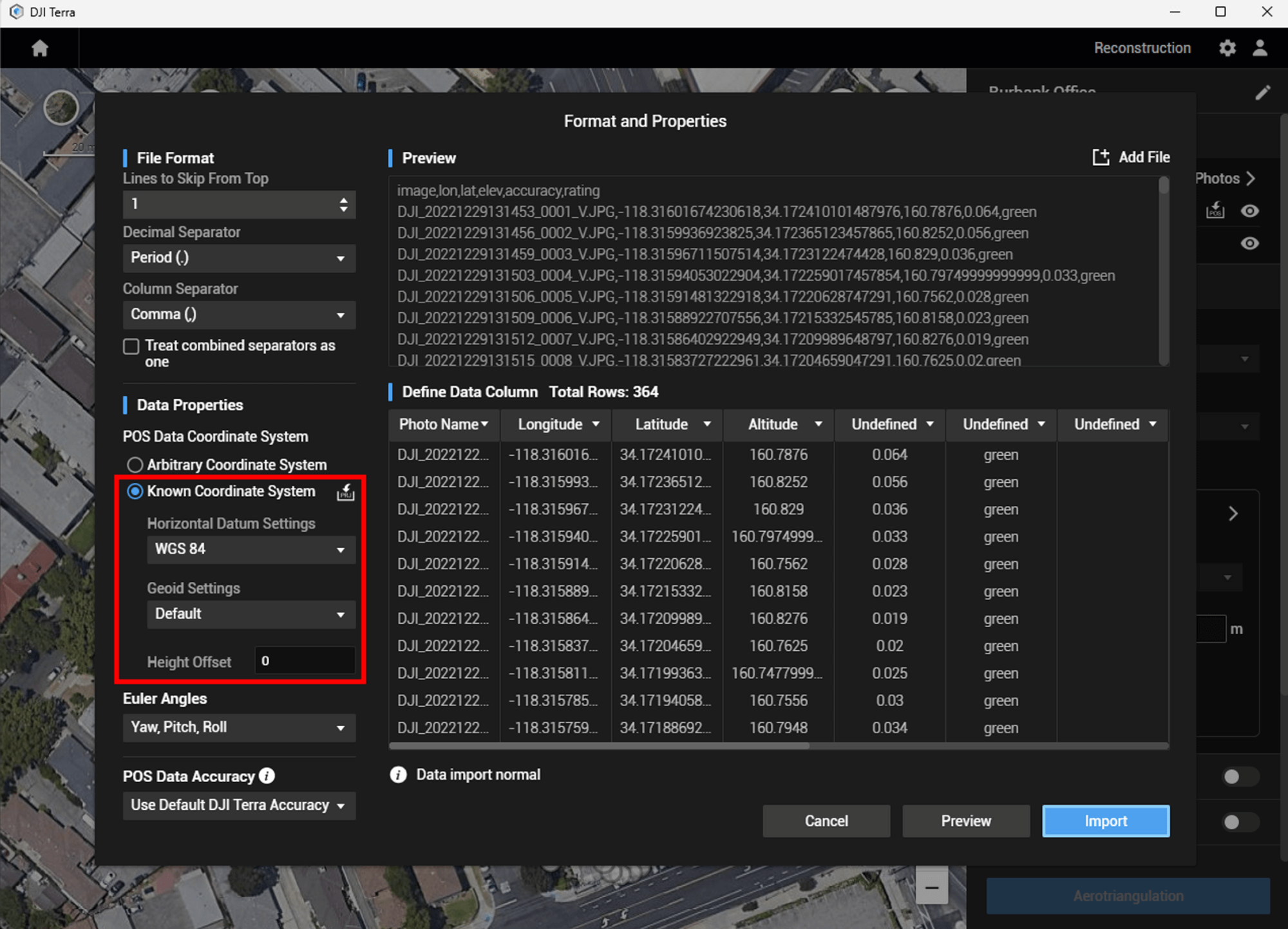
- Um fortzufahren, wählen Sie die Option „Known Coordinate System“ (Bekanntes Koordinatensystem) unter dem Koordinatensystem der POS-Daten. Wählen Sie dann die entsprechenden horizontalen und vertikalen Koordinaten für die importierten PPK-verarbeiteten POS-Daten des Bildes. Es ist wichtig, die richtigen Koordinaten sowohl für das horizontale als auch für das vertikale System zu wählen, um eine Verschiebung der Ausgabe zu vermeiden. Wenn Sie sich nicht sicher sind, welches Koordinatensystem Sie wählen sollen, entnehmen Sie das Koordinatensystem der mit PPK verarbeiteten POS-Daten den Einstellungen der PPK-Software oder dem Qualitätsbericht der PPK-Datenverarbeitung. Normalerweise sollte das horizontale System in WGS84 (EPSG:4326) und das vertikale System in ellipsoidischer Höhe (in Metern, was in DJI Terra als Standard eingestellt werden kann) angegeben werden. Wenn Sie die Definition der neuen POS-Daten abgeschlossen haben, wählen Sie „Import“ (Importieren).
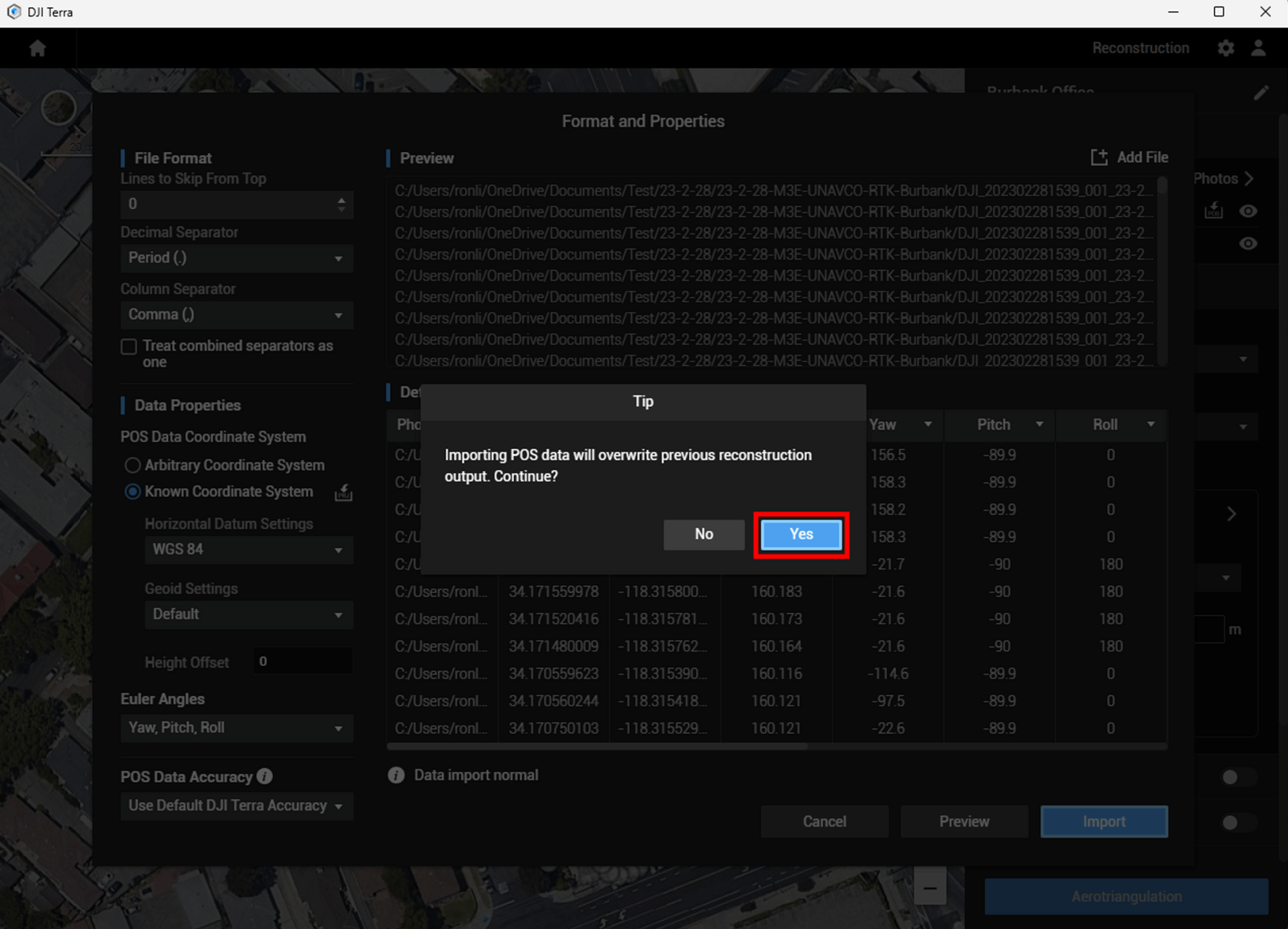
- Um die in Fotos eingebetteten alten POS-Bilddaten durch PPK-korrigierte POS-Daten aus der txt-Datei zu ersetzen, wählen Sie „Yes“ (Ja), um die Aktion in DJI Terra zu bestätigen. Die POS-Daten sind nun erfolgreich überschrieben.
LiDAR PPK-Prozess Allgemeiner Workflow
-
Um die DJI LiDAR-Daten mit der PPK-Methode zu verarbeiten, muss zuerst die Referenzdatei der Basisstation vorbereitet werden. DJI LiDAR unterstützt die folgenden Basisstationsdateiformate und die entsprechenden Versionen:
Datenformat Version Meldungsart Dateiname und Dateiendung müssen umbenannt werden in: RINEX V2.1.x / DJI_YYYYMMDDHHMM_XXX.obsRTCM V3.0
V3.2
V3.0: 1003, 1004, 1012, 1014 V3.2: MSM4, MSM5, MSM6, MSM7 DJI_YYYYMMDDHHMM_XXX.rtcm OEM OEM4
OEM6
RANGEDJI_YYYYMMDDHHMM_XXX.oemUBX / RAWX DJI_YYYYMMDDHHMM_XXX.ubx Es wird empfohlen, dass die Basislinie oder der Abstand zwischen der Basisstation, die für die Aufzeichnung der PPK verwendet wird, und dem Fluggerät innerhalb von 10 km liegt. Die Datei der Basisstation, die für den PPK-Prozess verwendet wird, muss die gesamte LiDAR-Scanflugdauer enthalten.
-
Folgen Sie der obigen Tabelle, um die Referenzdatei der Basisstation umzubenennen. Es ist wichtig, dass sowohl der Dateiname als auch die Dateierweiterung der Basisstations-Referenzdaten korrekt umbenannt werden. Der Name der Basisstations-Referenzdatei sollte identisch sein und mit anderen LiDAR-Rohdateien übereinstimmen. Denken Sie bei der RINEX-Datei daran, die Dateierweiterung von .YYO in .obs zu ändern.
-
Achten Sie darauf, dass sich die umbenannte Basisstations-Referenzdatei im gleichen Verzeichnis wie der LiDAR-Rohdatenordner befindet. Als nächstes importieren Sie den Ordner mit den LiDAR-Rohdaten in DJI Terra und starten den Prozess. DJI Terra liest automatisch die Referenzdatei der Basisstation und startet den PPK-Prozess mit der PPK-Referenz der Basisstation.
-
Danke!
Der PPK-Workflow bietet eine effiziente und genaue Lösung zur Gewinnung hochpräziser Geodaten für eine Vielzahl von Anwendungen. Durch den Einsatz von GPS und Nachbearbeitungstechniken können Nutzer mit PPK selbst in schwierigen Umgebungen zentimetergenaue Daten erhalten. Durch die Einhaltung des richtigen PPK-Workflows und den Einsatz fortschrittlicher Software- und Hardware-Tools können Nutzer sicherstellen, dass sie ein Höchstmaß an Genauigkeit und Präzision ihrer Daten erreichen, was letztlich zu besseren Entscheidungen und Ergebnissen führt.

-1.png?width=300&name=M400%20(1)-1.png)


