無人航空機システムと再生可能エネルギー業界を前進させる取り組みの中で、長年のDJIエンドユーザー、多国籍メーカー、そして電気とガスの供給業者が関係者を集め、ドローン イン ア ボックス システムの機能を検証し、テキサス州にある181 MWDCソーラーファームの総合点検を行いました。これは 北米初のDJI Dockを使用したソーラーファームの点検となりました。
現場にいた関係者には、業務用ドローンのイノベーションのリーダーでありDJI DockのメーカーであるDJI、吟味された多彩な企業向けソリューションを通じて最高クラスのドローンとロボット技術を国中の様々な組織に供給しているUVT、そして太陽光業界において統合されたオペレーティング システムを構築して太陽光設備の拡張や世界の気候目標達成を推進しているRaptor Mapsも含まれていました。
%20Solar%20Farm%20Inspection%20Conducted%20in%20North%20America/Dock%20Solar%20Inspection%20-%20DJI%2c%20Raptor%20Maps%2c%20Enel%2c%20UVT.png?width=840&height=450&name=Dock%20Solar%20Inspection%20-%20DJI%2c%20Raptor%20Maps%2c%20Enel%2c%20UVT.png)
機能と設定に関する検討事項
DJI Dockには、Matrice 30T Dock バージョンのドローンを遠隔操作してあらかじめプログラムした点検ルートを飛行する機能や、ライブ飛行制御を利用する機能があります。また、充電、データのオフロード、気象検知、RTK、冗長性に関する機能を内蔵し、640x512の視覚画像と放射分析熱画像を同時に撮影できます。
場所の選択
UVTは、顧客と直接連携して、DJI Dockの導入に最適な場所を決定しました。このときの主な検討項目は、電源、インターネット、そしてシステムに隣接するエリアに障害物がほぼないことなどでした。Connex社の建物の屋上が、すべての要件を満たしており、安全で障害物のない場所であったため、そこがテストに最適な場所であると判断されました。
現場到着後、UVTのチームは現場で顧客やDJIチームの協力を得て、メーカーの仕様に従いながら、機器構成や接続、接地など、DJI Dockの設定と導入を指揮しました。
今後のドローン イン ア ボックス システムの導入を考慮し、アレイ端部のインバーターブロックまでの飛行時間とバッテリーの使用を減らすために、中心部により近い場所への設置が検討されることになりました。また、システムの日常メンテナンスも考慮することが重要です。
%20Solar%20Farm%20Inspection%20Conducted%20in%20North%20America/Dock%20Solar%20Inspection%20-%20Dock%20on%20the%20roof.png?width=840&height=450&name=Dock%20Solar%20Inspection%20-%20Dock%20on%20the%20roof.png)
ミッション計画
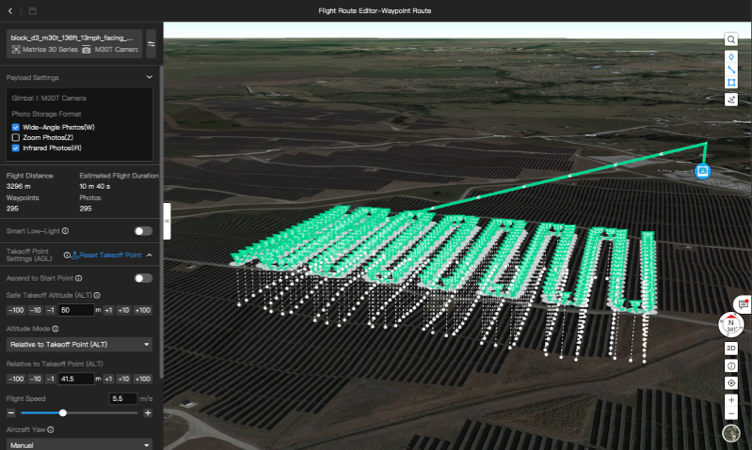
ミッション計画は、予防メンテナンスに最適なRaptor Mapsの標準データ収集要件を中心に構築されました。これらの要件では、5.5 cm/pxの熱画像解像度、40 mの飛行高度、70%のフロント オーバーラップ、20%のサイド オーバーラップ、パネルの傾斜に対応するジンバルピッチが必要でした。データ収集中、ドローンは2秒の写真撮影間隔をベースにしながら、5.5 m/sの飛行速度で飛行することができました。
Raptor Mapsは、様々なインバーターブロックの電気的レイアウトに基づき、上記のDJIシステムの規格に従ってウェイポイント ミッションを生成するために、カスタム ソフトウェア ツールを作成しました。ミッション計画に基づき、ドローンは、安全高度まで上昇して、インバーターブロック間を最高15 m/sで飛行することができました。ウェイポイント ミッションは、自動で実行できるようにFlightHub 2にインポートされています。DJI Dockは、DJIのFlightHub 2ソフトウェアまたはカスタムプライベート/パブリック ソフトウェアの導入により、制御と監視が可能になります。
Dockは、遠隔地からまったく問題なく動作する機能と、ソーラーファーム全体をカバーできる機能を実証しましたが、FAAの規制に基づき、すべてのミッションで、送信機を持ち、いつでもドローンを制御できる状態のパイロットが現場でミッションを監視していました。現在は、目視外飛行規制の免除申請の提出が検討されており、これが許可されれば、現場でパイロットがドローンを監視するという要件なしで、ドローン イン ア ボックス システムの運航が可能になります。
データ収集
飛行時間とバッテリーの充電時間は、データ収集時に考慮しなければならない重要な事項です。Matrice 30Tドローンは、最大飛行時間が41分で、20分で20%から90%への充電が可能です。ドローンのバッテリーは、バッテリーの寿命を延ばして定格の400回の充電サイクルを実現するために、デフォルトでは90%まで充電されるようになっています。しかし、スケジュールが設定されたミッションでは、100%のバッテリー充電の利用が可能です。Dockシステムは、ミッション中に、風やドローンの位置に基づいてホームに戻る必要があるかどうかを自動的に計算します。これにより、Dockに着陸する際は、15%以上のバッテリー残量が確保されます。
ドローンは、風速が10 m/sになったときに飛行を終了しました。これは、ドローンがDockから離着陸できる最大風速(12 m/s)を若干下回る風速です。 Dockにある風速計は、リアルタイムの風速データを示し、ドローンがDockまで戻って着陸できない緊急事態が発生した場合は、別の着陸ポイントを利用することができました。
インバーターブロックには様々な形状とサイズのものがありますが、平均データ収集時間は、1メガワット当たり約5分で控え目に計算されました。インバーターブロックまでの往復飛行時間は、位置や風速によって異なり、約10~30%のバッテリー使用量で合計3~9分です。ブロックまで2.5 km(往復5 km)を飛行して点検を完了する能力が実証されました。
%20Solar%20Farm%20Inspection%20Conducted%20in%20North%20America/Dock%20Solar%20Inspection%20-%20FlightHub%202%20screenshot.png?width=840&height=410&name=Dock%20Solar%20Inspection%20-%20FlightHub%202%20screenshot.png) FlightHub 2のDJI Dock制御インターフェース
FlightHub 2のDJI Dock制御インターフェース
データのオフロードと分析
データはドローンからDockにオフロードされた後、Dockからクラウドストレージにプッシュされ、デバイスからは自動的に削除されます。当社のテストでは、1ブロック当たり4GBを超える視覚画像と熱画像を常時収集しながら繰り返し行われるミッションでは、オフロードおよびアップロードプロセスが充電/データ収集から若干遅れることがわかりました。しかし、データのオフロードが完了していなくてもドローンは飛行を続けることが可能です。Dockの有線インターネット接続が十分なアップロード速度を発揮することを考えると、十分な照度のときにデータ収集を最大限に行い、夜間またはダウンタイム中にデータのアップロードを終えるというのも、許容されるワークフローであるとされました。
Raptor Mapsでは、必要なミッション計画ソフトウェアに加え、クラウドストレージにプッシュされるデータを取り込んでいます。画像および関連する飛行経路のメタデータは、機材の異常を特定し、重大度別に分類するために使用されます。これには、M30Tの放射分析サーマルカメラから得られた温度変化の計算も含まれており、計算後に、Raptor Mapsのプラットフォームにおいて、地理的情報としてデジタルツインに追加されます。デジタルツインと地理的情報を用いた分析を組み合わせることで、太陽光設備資産の所有者は、機器の問題を簡単に見つけて対処できるようになり、電力の生産性を最大限に高め、適切な修復に必要な推定作業を最小限にとどめることができます。この種のエンドツーエンド ソリューションは、Dockが太陽光設備の点検を行うために必要です。
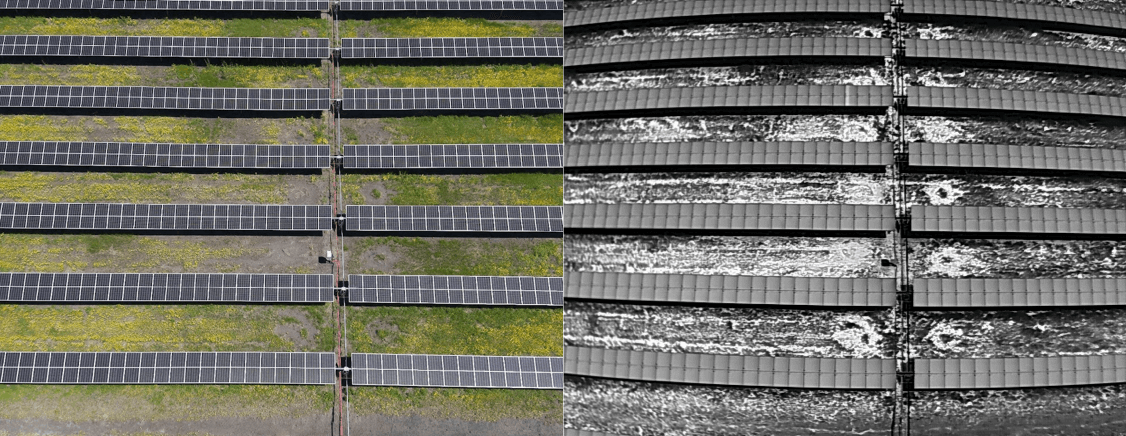
故障しているパネルはどれかわかりますか?
ヒント:IR画像の中で、上から3列目の明るい色のパネルを探してください。
補足点検
サブステーションや高架線といったその他のインフラについても、現場において追加テストが実施されました。チームは、必要なデータを収集するために顧客の社内のドローンパイロットが飛行を行った後、必要に応じてDockシステムにより飛行が繰り返し行われる能力、そして点群を生成してこれをミッション計画のためにFlightHub 2内で使用できる能力を実証することができました。現場における植生や建設の進捗状況、その他のインフラ(フェンスなど)の監視に加え、日常または必要時のセキュリティ パトロールも、このシステムによって成し遂げられました。
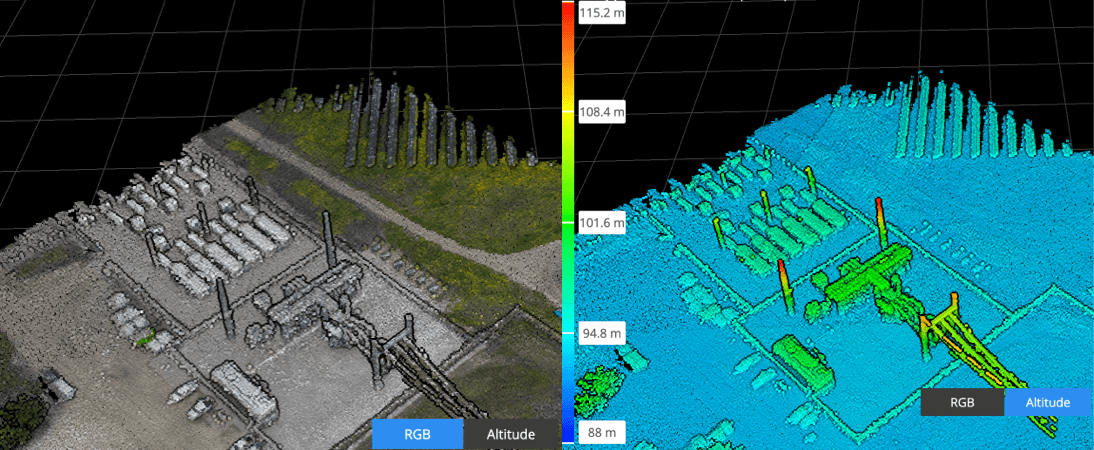 サブステーションの点群のRGB、および点群の高度
サブステーションの点群のRGB、および点群の高度
今後を見据え、チームは、Raptor Mapsの点検レポートに基づいて追加点検を完了する可能性も確認します。この追加点検では、ミッションが自動的にDockにアップロードされ、ドローンに対し、問題のエリアに戻ってより詳細な画像とパネル情報を収集するように指示が出されます。パネル上でのシリアル番号の読み取りに関心が集まったものの、このテストでは、シリアル番号の位置が制限要因となりました。
まとめ
協力的な取り組みにより(こうした取り組みはすべてのチームが関与しなければ実現できるものではありません)、関係者は協力して、Dockシステムの太陽光設備の点検機能を理解することができました。これは、次に示す「crawl, walk, and then run(はって、歩いて、それから走れ - いきなり走り出すな)」ということわざになぞらえて考えることができます。
プロジェクト前
これは、ドローン イン ア ボックス システム導入前の段階であり、様々な方針や操作手順に基づいた社内の無人航空機システムプログラムの確立、航空術という考え方に基づくリモート パイロット トレーニング、データ収集方法の理解、意志決定者が利用できるように結果を日常業務へ取り込むことなどの不確定要素があります。業界内で、ソフトウェア、ハードウェア、調達、サポートのすべてにまたがる関係を構築することも、このような協力においては非常に価値のあることでした。
プロジェクト進行中
この導入を成功させるには、システムの機能と要件に基づいてテストサイトと導入計画を決定することが重要でした。完了した飛行と充電時間を基に、Raptor Standardのガイドラインに従うと、チームは、控え目に見てもドックを用いて1時間当たり5 MWの割合でデータを収集できると推定しています(現場での運行時は、1時間当たり約7 MWに到達)。照度に基づいて飛行時間を1日6時間とすると、181MWファーム全体のデータ収集は、約6稼働日で完了することになります。
現段階では、目視外飛行規制の免除がないものの、必要に応じて遠隔地からミッションの計画、保存、および繰り返しを行うことができることに加え、パイロットが現場で行う多くの作業(充電、更新、飛行計画、データのオフロード/アップロードなど)を排除できることに価値があるというのが関係者の意見です。現場で点検を完了した後に、ドローンを使用してほぼ同じフォローアップ画像を収集したり、その他の重要な作業を成し遂げたりできる能力は、付加価値をもたらし、操作チームがその日の成果を最大化することに役立ちます。
プロジェクト後
ドックの場所や収集速度など、今後直面する不確定要素を考えると、検出された問題やパネル角度に基づいて自動的に策定される飛行計画は、プロセスの合理化に役立つはずです。目視外飛行規制が免除されれば、毎年または半年ごとの標準点検におけるコスト(この費用は様々ですが)を削減できます。また、現場のパイロット1人とサポートスタッフによる補足的なデータ収集に必要な、年間12,000ドルに達すると推定される人件費も削減できます。
私たちは、全員が一丸となってこの業界を前進させようとしています。ここで紹介した内容が皆様にとって有益な情報となれば幸いです。
Raptor Mapsについて
Raptor Mapsは、太陽光設備の統合オペレーティング システムを構築し、この業界の拡大や、地球規模の気候目標達成をサポートしています。太陽光発電業界全体を熟知する同社のソーラー ライフサイクル管理プラットフォーム(Raptor Solar)は、設備資産所有者やマネージャー、O&M、開発者、EPCが太陽光発電プラントを構築、維持、拡大するために必要なツールと記録システムを提供しています。このプラットフォームの中核となっているのは、地理的情報が付加され継続的に進化している、太陽光発電設備資産のデジタルツインです。これは、実用的なインサイトを得るために必要なデータソースと統合されています。Raptor Solarは、インサイトとアクションのギャップを埋め、設備資産の健全性と発電を改善し、リスクを軽減し、最終的には太陽光設備資産の収益率を高めることができます。Raptor Mapsの詳細やデモのスケジュールについては、同社(raptormaps.com/contact)にお問い合わせください。
UVTについて
UVTは、国中の様々な組織に、ドローンやロボットの最新技術やトレーニング、サポートを提供しています。また、顧客と連携することで、ミッションに合わせてカスタマイズされたエンドツーエンドのターンキー ソリューションを提供しています。UVTが提供する総合的なサービスには、吟味された多彩な企業向けハードウェア/ソフトウェア ソリューションやコンサルティング、現場調査、設置、シームレスな導入のための教育などがあります。これらのサービスはすべて、フリートに関する一連の技術や運用サポートサービスによって支えられており、顧客の組織は、同社の技術的を最大限に活用できるようになっています。詳細については、同社のウェブサイト(www.uvt.us)をご覧ください。



