DJI Enterpriseは、地理空間を専門とするお客様向けにさまざまな製品を提供しています。以下は、次の製品に関するよくある質問とその回答です。
- Mavic 3 Enterprise
- Matrice M350/M300 RTK + Zenmuse L1
- Matrice M350/M300 RTK + Zenmuse P1
- DJI Terra
本書では、よくある質問への回答と、各製品の詳細情報および仕様について説明します。さらに、データ処理や正確な結果を得るためのヒント、推奨事項をご案内します。
地理空間ソリューション
Mavic 3 Enterprise、Zenmuse L1、Zenmuse P1の長所と短所について教えてください。
| 製品 |
長所 |
短所 |
|
M350 RTK + Zenmuse L1 |
- 高い対応性:照度条件に左右されず、低テクスチャ環境でのモデリングが可能です。 - 結果を使用して、樹冠を透過したデジタル高度モデル(DEM)の抽出が可能です。 - 送電線などの点群出力から詳細な構造を簡単に収集できます。• 優れたモデリング効率:1回の飛行で494エーカーの範囲をカバーします。[1] |
- 精度は相対的に初期のPOSステータスに依存します。 |
|
M350 RTK + Zenmuse P1 |
- 複数の操作モードに対応しています:2Dオルソフォト、3Dオブリーク、近接撮影など。
|
- 夜間撮影のモデリングまたは低テクスチャ環境でのモデリングエリアの問題は解消できません。 - LiDARのように樹冠の透過はできないため、写真測量ソリューションは結果モデルがDSMに限定され、DEMの結果を得ることはできません。 - 写真測量プロセスでは、空中三角測量を実行し、生画像データからモデルを生成するために、極めて高いGPU処理性能が必要です。一方、LiDARデータはユニバーサル形式への変換のみで活用できます。このため、写真測量ソリューションのデータ収集、処理フェーズの効率性は、LiDARソリューションよりも低くなります。 |
|
Mavic 3 Enterprise |
- 導入しやすく、費用対効果に優れています。
- Phantom 4 ProやPhantom 4 RTKと比較して、Mavic 3 Enterpriseは軽量で携帯性に優れ、高い障害物回避性能、長いバッテリー寿命、優れたカメラの仕様を実現しています。 |
- P1と比較して運用効率にやや劣ります。
- 大規模運用には不向きです。 - Zenmuse P1と同様の短所がMavic 3 Enterpriseにも存在します。 |
注:
[1] 飛行速度22.37 mph、飛行高度328フィート、横方向のオーバーラップ20%、データ収集時間30分、点群密度200ポイント/m²超*
[2] 35 mmレンズ、3 cm GSD、飛行ミッション設定を使用:進行方向のオーバーラップ75%、横方向のオーバーラップ55%
カメラ間で写真測量機能を比較した場合
|
RTKモジュール(ワイドカメラ)搭載の Mavic 3 Enterprise |
Matrice M350 RTK + Zenmuse P1 |
Matrice M350 RTK + Zenmuse L1 |
|
|
サイズ |
小型 |
中型 |
中型 |
|
測量等級 |
はい |
はい |
はい |
|
RTK/PPK対応 |
はい |
はい |
はい |
|
GSD (cm) |
H (m)/36.5 |
24 mmH (m)/5,535 mm:H (m)/8,050 mm:H (m)/120 |
H (m)/36.5 |
|
センサーサイズ |
4/3インチ 5,280 × 3,956 (4:3) |
フルフレーム (35.9 × 24 mm) 8,192 × 5,460 (3:2) |
1インチ 5,472 × 3,648 (3:2) |
|
静止画解像度 |
20MP |
45MP |
20MP |
|
ピクセルサイズ |
3.3μm |
4.4μm |
2.4μm |
|
レンズオプション |
12 mm/24 mm、FOV 84.0°相当 |
DL 24 mm:FOV 84.0° DL 35 mm:FOV 63.5° DL 50 mm:FOV 46.8° |
8.8 mm/24 mm、FOV 84.0°相当 |
|
メカニカルシャッター |
はい(1/2,000-8秒) |
はい(1/2,000-1秒) |
はい(1/2,000-8秒) |
|
最小撮影間隔 |
0.7秒 |
0.7秒 |
2.5秒 |
|
飛行時間 |
最大42分(RTKモジュール使用時) |
最大44分 |
最大42分 |
|
メモリー要件 |
microSDUHS-Iスピードクラス3以上 最大容量:512 GB |
SD UHS-I等級以上 最大容量:512 GB |
microSD UHS-Iスピードクラス3以上 最大容量:256 GB |
|
最大風圧抵抗 |
12 m/秒 |
12 m/秒 |
12 m/秒 |
|
スマートオブリーク対応 |
はい |
はい |
いいえ |
|
リアルタイム地形フォロー |
はい |
いいえ |
いいえ |
|
SDKおよび他社製アプリへの対応 |
はい |
はい |
はい |
レンズ歪みパラメーターへのアクセス方法を教えてください
レンズ歪みパラメーターに手動でアクセスするには、「.jpg」形式の画像をテキストファイルとして開き、XMPデータフィールドでキーワード「DewarpData」を検索します。テキスト形式は、次のようになります。drone-dji: DewarpData = “2023-03-13;3663.4800000000…”
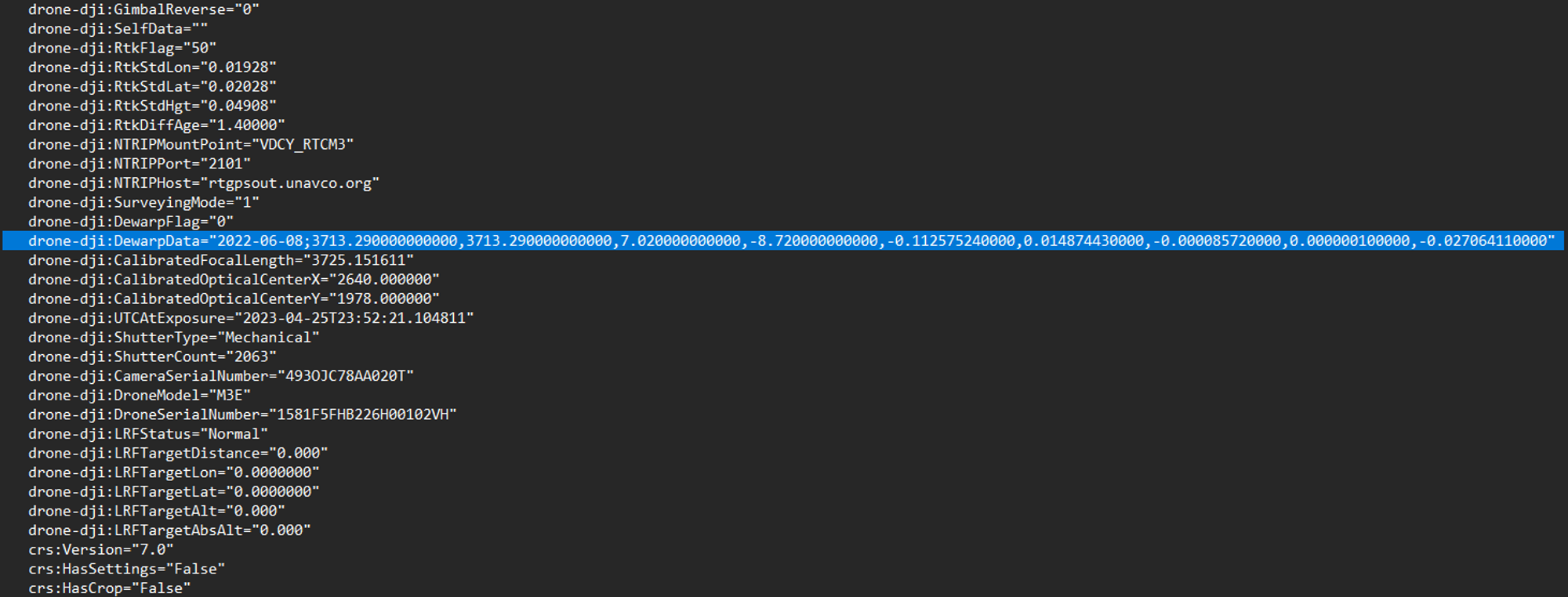
連続番号は次の内容を示します。「calibrate_date;fx,fy,cx,cy,k1,k2,p1,p2,k3」「fx,fy」はピクセル単位の焦点距離、「cx,cy」はピクセル座標(画像の中心としての原点)で表される光学中心、「k1,k2,k3」は半径方向の歪み、「p1,p2」は接戦歪みを示します。
詳細は、次の『OpenCVによるカメラキャリブレーションのガイド』を参照してください。
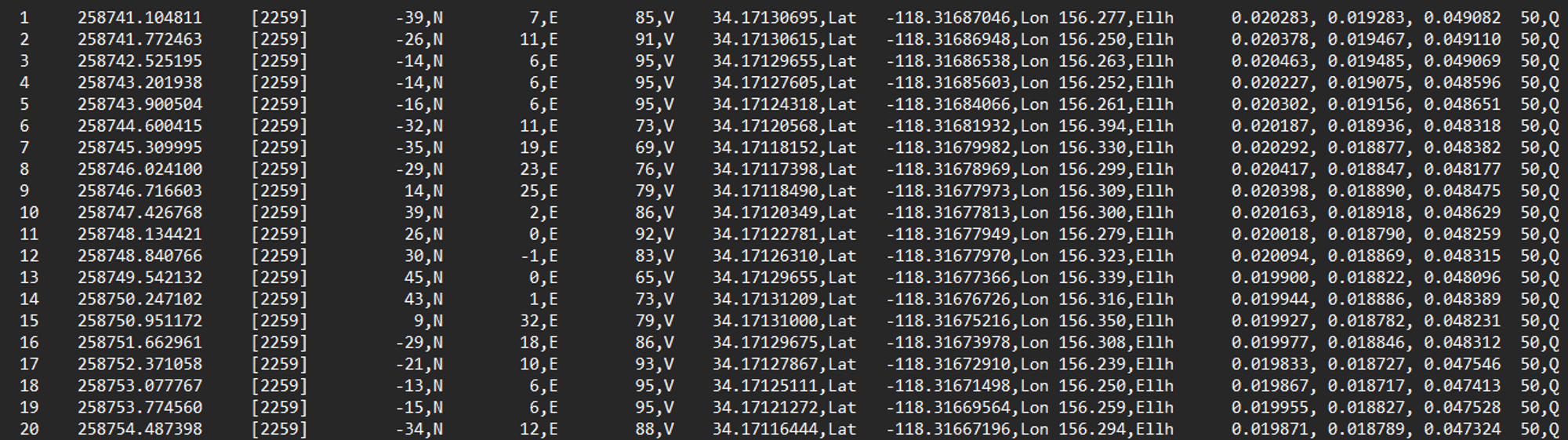
XXX_Timestamp.MRKファイル内の各データ列は何を表していますか?
列1:対応する写真番号
列2:GPSの露光時間、秒/週(UTC時間)
列3:GPS週の露光時間(UTC時間)
列4:ノースアンテナ(N)からCMOSセンサー中心までの位相補正値(単位:ミリメートル)
列5:イーストアンテナ(E)からCMOSセンサー中心までの位相補正値(単位:ミリメートル)
列6:上下方向(下側が正方向)アンテナ(V)からCMOSセンサー中心までの位相補正値(単位:ミリメートル)
列7:露光時間から取得したCMOS中心のリアルタイム緯度(列8)と経度(列8)(十進角)
列9:露光時間から取得したCMOS中心のリアルタイム高さ(メートル)高さとは、デフォルトの準拠楕円体面に対応する測地高度(一般的に楕円体高と呼ばれる)のことです(独自の楕円体モデルを定義可能で、デフォルトはWGS84です。CGCS2000などの異なるCORSステーションシステム/基準点にアクセスして、他の楕円体に設定することもできます)。この高さは、世界中で標準的に使用されているEGM96/2008高度基準(海抜高度)に基づくものではないことに注意してください。
列10~12:測位の標準偏差は、それぞれ北方向、東方向、および上方向に生じ、3方向における測位の相対精度を示します。単位はメートルです。
列13:RTKステータス、0 - 測位なし、16 - 単独測位モード、34 - RTK Float解、50-RTK Fix解写真のフラグが50でない場合、この写真を直接マッピングに使用することはお勧めしません。
Zenmuse L1
地上基準点(GCP)を使用して、DJI Terra内のLiDARデータを処理することは可能ですか?
Terraは、LiDARデータのGCPインポートに対応していません。L1 LiDARデータにGCPを適用する際は、TerraSolid UAVソフトウェアなどの他社製ソフトウェアの使用をお勧めします。
LAS以外のZenmuse L1のデータ出力形式は何ですか?
PNTS、PLY、PCD、S3MBです。
RTK接続なしでL1の生データ処理は可能ですか?通常のGPS飛行中にZenmuse L1の生データを処理できますか?
はい、RTK接続なしでL1の生データを処理できます。ただし、DJI Terra内で点群ファイルを正しく処理して出力するには、残りの生データとともに、ベースステーションの監視ファイル(Rinex、RTCM、OEM、またはUBXファイル)をL1生データフォルダーに追加する必要があります。このプロセスは、後処理キネマティック(PPK)と呼ばれています。
このプロセスの詳細は、操作ガイド(特に11ページ)を参照してください。 https://dl.djicdn.com/downloads/Zenmuse_L1/20230420/DJI_L1_Operation_Guidebook_V1.2.pdf
複数の飛行データをZenmsue L1とマージして、DJI Terraで1つの点群にすることはできますか?
はい。L1の飛行で収集した複数の生データフォルダーをインポートし、[マージ出力]オプションをチェックして、Terraで点群を1つのLASファイルに出力できます。
シングル、ダブル、トリプルの各リターンの違いは何ですか?また、これらを使用する際のベストプラクティスは?
リターン/エコーモード:レーザー光のビーム照射後、LiDARが複数のリターンを受信できることを示します。
シングルリターンモードでは、1回のレーザーポイント照射で、LiDARが最大1つのリターンを受信できます。ダブルリターンモードでは、1回のレーザーポイント照射で、LiDARが最大2つのリターンを受信できます。トリプルリターンモードでは、レーザーポイントごとにLiDARが最大3つのリターンを受信できます。
表面情報またはDSMのみが必要な場合は、シングルリターンモードで十分です。ただし、樹冠の透過やDEMデータを必要とする森林調査などでは、ダブルリターンまたはトリプルリターンモードが必要になります。
M350/M300 RTKのデュアル下方ジンバルまたは上方ジンバルにZenmuse L1を取り付けることはできますか?
いいえ。Zenmuse L1は、M300/M350 RTKのシングル下方ジンバルにのみ取り付けることができます。デュアル下方ジンバルまたは上方ジンバルに使用すると、ジンバルの位置が事前定義位置と異なるため、精度に影響を及ぼします。
Zenmuse P1
Zenmuse X7レンズは Zenmuse P1に適合しますか?
24 mm、35 mm、50 mmのみが適合します。センサーのサイズにより、16 mmはP1に適合しません。
正しいキャリブレーションを実施することで、精度が測量等級の要件を満たします。DJI Terraソフトウェアを使用して、新しいレンズのパラメーターの最初のキャリブレーションと上書きを実行できます。手順は次のとおりです。
Zenmuse P1レンズを交換しましたが、カメラレンズの歪みパラメーターがすべて古くなっています。新しいレンズで組み込み関数パラメーターを再度キャリブレーションする方法を教えてください。
P1レンズが正しくキャリブレーションされているかどうかを確認するには、まずP1.jpg画像をテキストファイルとして開き、XMPデータフィールド[DewarpData]を検索します。このフィールドが表示されない場合、レンズは正しくキャリブレーションされていません。レンズの歪みパラメーターを再度キャリブレーションするには、次の手順に従います。
- キャリブレーションデータの収集
- 建物や丘の斜面など、高低差が大きいエリアではキャリブレーションを行うことをお勧めします。
- スマートオブリーク キャプチャ―またはオブリークミッション(5つのルート)を使用して、ミッションを計画します。
- パラメーター要件:収集する画像が100以上、フロントオーバーラップレートが80%以上、サイドオーバーラップレートが70%以上、オブリーク画像が2/3以上を占めるようにします。(飛行高度の制限なし)
- RTKをオンにし、RTKが[FIX]になってから離陸します。
- モデリング:DJI Terra v2.3.1以降のバージョンを使用して新しい3D再構築ミッションを作成し、モデリングを開始します。
- キャリブレーション
- モデリングが完了したら、フォルダーを開き、[AT-report]ディレクトリで[sfm_report.json]ファイルを探して、カメラのSDカードにコピーします。
- SDカードをP1カメラに挿入し、機体に接続して電源をオンにします。キャリブレーション後、カメラが自動的に内部パラメーターを書き込みます。
- 写真を撮影し、「メモ帳」で開き、XMPを検索します。DewarpDataがある場合、カメラの内部パラメーターのキャリブレーションは正常に完了しています。
M350/M300 RTKのデュアル下方ジンバルまたは上方ジンバルにZenmuse P1を取り付けることができますか?
いいえ。Zenmuse P1は、M300/M350 RTKのシングル下方ジンバルにのみ取り付けることができます。デュアル下方ジンバルまたは上方ジンバルに使用すると、ジンバルの位置が事前定義位置と異なるため、精度に影響を及ぼします。
DJI Terra
ドローン画像をステッチして2Dマップまたは3Dモデルに変換できる写真測量処理ソフトウェアはありますか?
はい、DJI Terraのソフトウェアで写真測量処理が可能です。DJI Terraでは、デジタルサーフェスモデル(DSM)およびトゥルーデジタルオルソフォトマップ(TDOM)を、GeoTIFF形式、3Dメッシュモデルまたは点群モデルで出力できます。
画像をオルソフォトマップに処理し、デジタルサーフェスを作成するにはどのソフトウェアがお薦めですか?
オフラインでの処理にはDJI Terraをお薦めします。または、目的に合った他社製ソフトウェアをお使いください。
DJI Terraでドローン写真を処理する前に確認すべきことは何ですか?
飛行前に、カメラ設定の[メカニカルシャッター]オプションが有効で、[歪み補正]オプションが無効になっていることを確認してください。
PPKを使用している場合は、画像位置データが正しいことを確認してください。RTKでは、写真に関して必要な作業は特にありません。
PPKを使用している場合は、画像位置データが正しいことを確認してください。RTKでは、写真に関して必要な作業は特にありません。
Terra内にインポートされたドローン画像データには、どのような追加の処理変更を適用できますか?
Terraで処理する場合、カラー濃度、露出、その他の属性を調整する設定はありません。変更できるのは、座標系とオイラー角を含む画像のPOSデータのみです。ただし、DJI Terraでは、ヘイズの低減、水面の調整、光の均一性などの追加機能により、再構築出力の品質を確保しています。
飛行中にドローンが撮影する画像のピンぼけを最小限に抑えるには、どうしたらよいですか?
シャッター速度を1/500秒より速く、[メカニカルシャッター] を有効に、ISOを [自動] に設定し、それに応じて絞りを調整することをお勧めします。
GPS/IMU情報は写真のメタデータフィールドに添付されていますか?
はい。XMPメタデータフィールドの詳細については、『P1マニュアル』の22~23ページでも確認できます。 Zenmuse_P1ユーザーマニュアルEN_v1.2_3.pdf (djicdn.com)
DJI Terraで処理されるLiDARデータは、キャリブレーション/分類できますか?
グラウンド以外の分類はありません。Terraには、ノイズの低減や点群を薄くする基本機能もあります。
Zenmuse L1の軌跡データは、LAS点群とは別のファイルにありますか?
はい。Terraのプロジェクト結果フォルダの下に、「sbit.out」形式で出力されます。
はい。Terraのプロジェクト結果フォルダーの下に、「sbit.out」形式で出力されます。
Zenmuse L1 LiDARセンサーには RGBカメラも搭載されていますが、出力データはカラーの点群ですか?
点群の生データと同時に写真を撮影できます。これらの写真を、写真測量の処理や点群のカラー化に使用できます。
TerraはデータをLAS点群に変換しますが、LAS v1.2または1.4のどちらのバージョンですか?
LAS v1.2
Zenmuse L1で推奨されるワークフローを教えてください。
L1のダウンロードページにある『L1操作ガイド』を参照してください。
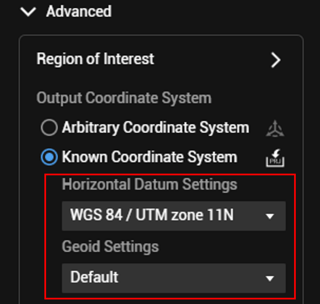
写真測量プロジェクトを既存の座標系で出力する方法を教えてください。
[詳細設定]オプションの下にある[座標系の出力]の[既存の座標系]で、[水平データム設定]と[ジオイド設定]から既存の座標系を選択します。
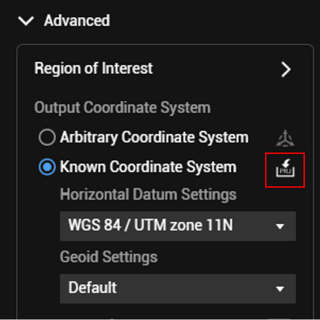
Terraの既存の座標系リストに、必要な座標系がありません。設定方法を教えてください。
- 座標系の座標系投影ファイルが「.prj」形式の場合、[詳細設定]オプション - [出力座標系] - [既知の座標系]で[PRJのインポート]アイコンをクリックし、PRJ形式で座標系をインポートするよう選択します。
対象の座標系でカスタムのデカルト座標系を使用する場合は、7パラメーター変換ツールを使用して、TDOM/モデルの結果をカスタムのデカルト座標系に変換します。この手順の詳細については、『Terraユーザーマニュアル』の29ページを参照してください。 https://dl.djicdn.com/downloads/dji-terra/20230525/DJI_Terra_User_Manual_v3.7_EN.pdf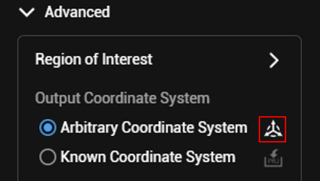
垂直座標系の選択時に出力エラーが膨大になった場合の対処方法を教えてください。
- スマートマップの垂直座標系は、一般に公開されている垂直座標系情報のみを使用します。高度ファイルが追加されているかどうかを確認してください。詳細情報は、ウェブサイトhttps://cdn.proj.org/を参照してください。
- 使用する垂直座標系に高度ファイルが追加されておらず、その領域の高度異常ファイルが公開されていない場合は、GCPを追加して高度精度を改善することをお勧めします。
地形フォロー
Pilot 2アプリで地形フォロー機能を利用する方法を教えてください。
Pilotアプリでは、様々な方法で地形フォロー飛行を計画できます。
- ASTER GDEM V3 30mモデルでは、オプションでPilotアプリの搭載が可能です。[マッピングミッション]を選択してから[地形フォロー]を有効にし、[DSMファイル]を選択してインターネットからダウンロードします。
- DSM/DEMをTIFF形式でPilotにインポートし、[マッピングミッション]を選択してから[地形フォロー]を有効にし、[DSM ファイル]、[TIFF]の順に選択して地形モデルをインポートします。
- リアルタイム地形フォローは、Mavic 3 Enterprise、Thermal、Multispectralでのみ利用できます。
以下に、各ミッションモードと地形フォロー機能の互換性に関する概要表を示します。
|
地形フォローに対応するミッションのタイプ |
||||
|
2Dマッピング |
スマートオブリーク |
オブリーク |
直線 |
|
|
M3E DSMフォロー |
✓ |
✓ |
✓ |
✓ |
|
M3Eリアルタイム地形フォロー |
✓ |
✓ |
X |
✓ |
|
M3T DSMフォロー |
✓ |
X |
✓ |
✓ |
|
M3Tリアルタイム地形フォロー |
✓ |
X |
X |
✓ |
|
M30 DSMフォロー |
✓ |
X |
✓ |
✓ |
|
M300 RTK DSMフォロー |
✓ |
✓ |
✓ |
✓ |
WGS84 DSMのTIFFファイルをPilot 2アプリにインポートできないのはなぜですか?
投影されたWGS84ではなく、測地WGS84を使用してください。Pilot 2は、EPSG4326測地WGS84 DEM/DSMのみを認識します。
写真フォーマットとカメラ設定
Mavic 3 Enterprise、Zenmuse P1、Zenmuse L1カメラの写真フォーマットを教えてください。
- L1: JPG
- P1: JPG+DNG
- Mavic 3 Enterprise: JPG+DNG
カメラの入力設定ではなにを変更できますか?
カメラモード設定(自動、S、A、M)、ISO、絞り、シャッター速度、露出値、フォーカスモード(AF/MF)を変更できます。
Zenmuse P1センサーで、大/小TIFF 8/16ビット画像を撮影できますか?
いいえ。ただし、Zenmuse P1はDNGで生データを出力します。
写真測量ミッションの際に、Mavic 3 Enterprise、Mavic 3 Multispectral、Zenmuse P1でお薦めのカメラ設定を教えてください。
Mavic 3 Enterpriseのカメラ設定:
- [歪み補正] 設定を無効にします。
- [メカニカルシャッター] 設定を有効にします。
- フォーカスモードで [MF] を選択し、フォーカスを [無限大] に設定します。
- カメラの設定モードで [自動] を選択します。
- 写真測量ミッションに合わせてカメラ設定を手動で行う場合、以下をお勧めします。
- ISOを [自動] に設定します。
- 被写体ブレが生じないようシャッター速度を1/1,000秒より速く設定します(機械式シャッターでは最大1/2,000秒)。
- EVを [0] に設定します。
- AEを [5.6~11] の間に設定します。
Zenmuse P1のカメラ設定:
- [歪み補正] 設定を無効にします。
- [メカニカルシャッター] 設定を有効にします。
- フォーカスモードで [MF] を選択し、フォーカスを [無限大] に設定します。
- カメラの設定モードで [M] を選択します。
- [自動ISO] を設定します。
- 環境光に基づき、手動で絞りを設定します。絞りは [5.6~11] の間に設定します。
- 被写体ブレが生じないようシャッター速度を1/500秒より速く設定します(機械式シャッターでは最大1/2,000秒)。
Pilot 2アプリのカメラ設定にある、[歪み補正]オプションとは何ですか?有効にする必要がありますか?
[歪み補正] を有効にすると、カメラレンズによって生じる光学的な歪みが補正され、補正済みのリアルタイム画像が撮影され、マイクロSDカードに保存されます。[歪み補正] を無効にすると、魚眼効果のかかった未編集画像が撮影されます。Zenmuse P1、Zenmuse L1、Mavic 3 Enterprise広角レンズ、Mavic 3 Multispectral広角レンズ、およびPhantom 4 RTKのレンズ歪みパラメーターは、すべて工場で事前測定されています。これらの固有パラメーターは、撮影されたすべての画像のXMPフィールドにある [DewarpData] に保存されます。これらの画像をDJI Terraソフトウェアにインポートすると、自動で認識されます。他社製の写真測量ソフトウェアを使用する場合は、これらのパラメーターを手動入力することで画像の歪みを補正できます。カメラの歪み補正パラメーターによる後処理ソフトウェアの歪み補正は、Pilot 2アプリ内の歪み補正機能よりもはるかに精度が高いため、測量ではこのオプションを無効にすることをお勧めします。
[歪み補正]を有効にすると、カメラレンズによって生じる光学的な歪みが補正され、補正済みのリアルタイム画像が撮影されて、Micro-SDカードに保存されます。[歪み補正]を無効にすると、魚眼効果のかかった未編集画像が撮影されます。Zenmuse P1、Zenmuse L1、Mavic 3 Enterprise広角レンズ、Mavic 3 Multispectral広角レンズ、Phantom 4 RTKのレンズ歪みパラメーターは、すべて工場で事前測定されています。これらの固有パラメーターは、撮影されたすべての画像のXMPフィールドにある[DewarpData]に保存されます。これらの画像をDJI Terraソフトウェアにインポートすると、自動で認識されます。他社製の写真測量ソフトウェアを使用する場合は、これらのパラメーターを手動入力することで画像の歪みを補正できます。カメラの歪み補正パラメーターによる後処理ソフトウェアの歪み補正は、Pilot 2アプリ内の歪み補正機能よりもはるかに精度が高いため、測量ではこのオプションを無効にすることをお勧めします。
RTK/PPK
写真のジオタグに書き込まれている座標系はどれですか?必ず測地WGS84にありますか?
いいえ、画像の座標系はNTRIP RTK修正ソースに依存するため、必ずしもWGS84にあるとは限りません。D-RTK2モバイルステーションをRTKソースとして使用している場合、水平座標系はWGS84 EPSG:4326、垂直座標系は楕円体高になります。Terraでは、画像のインポート時にシステムを定義する必要があります。定義しない場合、Terraはデフォルトですべての画像の座標系を、水平座標系はWGS84 (EPSG:4326)、垂直座標系は楕円体高に設定します。
DJI Enterpriseドローンで他社製のRTK基地局を使用する方法を教えてください。
他社製RTK基地局の場合、最初にNTRIPサービス配信を構成し、RTK基地局とM3M RCが同じWi-Fiネットワークにあることを確認してから、Pilotアプリの[RTK設定]ページで認証情報を入力し、NTRIP接続を構成します。詳細は、マニュアルの46ページを参照してください。
https://dl.djicdn.com/downloads/DJI_Mavic_3_Enterprise/20230404/DJI_Mavic_3E_3T_User_Manual_JA.pdf
使用前に、既知の場所でD-RTK2基地局を初期化する必要がありますか?
この質問に対する回答は、RTKを高精度測位に使用し、相対精度のみを重視するか、測量作業などでグローバル精度の高いデータ記録にRTKを使用しているかによって異なります。前者の場合、回答は「いいえ」です。後者の場合、回答は「はい」です。
この質問に対する回答は、RTKを高精度測位に使用し、相対精度のみを重視するか、測量作業などでグローバル精度の高いデータ記録にRTKを使用するかによって異なります。前者の場合、回答は「いいえ」です。後者の場合、回答は「はい」です。
RTK対応のDJI Enterpriseドローンは、他社のNTRIPサブスクリプションサービスに接続できますか?
はい。DJI EnterpriseのRTK対応ドローンは、Topcon Topnet Live、Leica SmartNet、Trimble VRSなどのNTRIP対応ネットワークRTKサービスに直接接続できます。これにより、サービスを簡単に設定できます。
D-RTK2基地局を設定する既知の点がない新しいサイトでは、どのようにして収集するデータの正確性を確保できますか?
NTRIPサービスが利用可能な場合、ベースライン(ドローンとNTRIPキャスター間の距離)が遠すぎない限り、インターネットに接続し、NTRIPキャスター経由でRTKを使用できます。インターネットが利用できない場合、RTKの代わりにPPKワークフローを使用して、ベースステーションのデータとドローンの画像データを後処理することを検討してください。PPKの詳細についてはこちらをご覧ください。
NTRIPサービスが利用可能な場合、ベースライン(ドローンとNTRIPキャスター間の距離)が遠すぎない限り、インターネットに接続し、NTRIPキャスター経由でRTKを使用できます。インターネットが利用できない場合、RTKの代わりにPPKワークフローを使用して、基地局のデータとドローンの画像データを後処理することを検討してください。PPKの詳細についてはこちらをご覧ください。
DJI EnterpriseのRTK対応ドローンがサポートするRTCMメッセージタイプを教えてください。
ドローンモデルに対応するRTCMメッセージタイプが記載された、次の表を参照してください。
|
プラットフォーム |
RTKモジュール |
対応RTKサービス |
NTRIPプロトコル対応のRTCMメッセージタイプ |
|
Matrice M300 RTK Matrice M350 RTK |
デュアルRTKアンテナ |
カスタムネットワークRTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
|
Matrice M30 Matrice M30T |
デュアルRTKアンテナ |
カスタムネットワークRTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
|
Mavic 3 Enterprise Mavic 3 Thermal Mavic 3 Multispectral |
オプション:RTKモジュールは別売りです。 |
カスタムネットワークRTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC RTCM 33_GRCE |
|
Phantom 4 RTK |
シングルRTKアンテナ |
カスタムネットワークRTK (NTRIP) DJI D-RTK 2 |
RTCM 3.0 RTCM 3.1 RTCM 3.2 RTCM 33_GRC |
|
Mavic 2 Enterprise Advanced |
Optional; RTK Module sold separately |
カスタムネットワークRTK (NTRIP) |
TCM 3.0 RTCM 3.1 RTCM 3.2 |



