後処理キネマティック(PPK)は、全地球航法衛星システム(GNSS)のデータを使用して、ローバー/ドローンの位置と軌道を正確に決定する方法です。PPKでは、近くのベースステーションの位置と軌道に関する情報とともに、ドローンから生のGNSSデータを収集し、事後にデータを処理することで、位置・軌道情報の精度を向上させます。
PPKは、高精度の測位が重要な測量やマッピング、精密農業などの用途でよく使用されています。ベースステーションとのリアルタイムの無線接続を要するリアルタイムキネマティック(RTK)測位とは異なり、PPKではデータを事後に処理するため、データ収集に高い柔軟性がもたらされます。
GNSSデータの後処理は、レシーバーが収集した生データを専用のソフトウェアで処理し、近くのベースステーションからのデータと比較することで、特定の時点におけるドローンの正確な位置を決定できます。このプロセスは、大気条件や衛星軌道のずれなどの要因によって発生したエラーを補正し、位置・軌道情報の精度を向上させることが可能です。
RTK、PPKによる測位はどちらもドローンマッピング用途に使用できますが、RTKよりもPPKを使用する方が、いくらか多くの利点があります。
|
Pros |
Cons |
|
|
RTK |
リアルタイムフィードバック:RTKを使用すると、ミッション中にリアルタイムのフィードバックを利用できるため、問題が発生した時点でそれを特定し、対処することが容易です。 高速データ処理:RTKデータは迅速に処理できるため、最終的な結果を得るまでの所要時間が短縮されます。 使いやすい:一般的に、RTKはPPKよりも使いやすく、セットアップと操作に必要なスキルが少なくて済みます。 |
精度が劣る:RTKは通信の遅延や中断による影響を受ける可能性があるため、PPKよりも精度が低くなります。 通信依存性:RTKでは、ミッション中にベースステーションとリアルタイムで通信する必要があります。そのため、モバイル通信のサービスエリアに制限があったりサービスエリア外になる遠隔地では、NTRIPプロトコルを介したRTKの使用が困難になることがあります。 コストの増加:RTKは、追加のRTKモジュールまたはNTRIPサービスサブスクリプション料金が必要なため、PPKよりも高額な場合があります。 |
|
PPK |
リアルタイム通信が不要:RTKでは、ドローンと地上局の間でリアルタイム通信を行い、ベースステーションから補正データを受信する必要があります。一方、PPKでは、補正データは事後の後処理の際に適用されるため、リアルタイム通信は不要です。 柔軟性の向上:PPKを使用すると、ドローンは飛行ミッションを実行してデータを収集し、データ処理は後で行うことができるため、特にモバイル通信のサービスエリアに制限がある地域やサービスエリア外の地域でのデータ収集の柔軟性が高まります。 高い精度:RTKとPPKはどちらも高い精度が得られますが、PPKはデータ収集中に通信の遅延や中断に影響されないため、さらに精度が高くなります。また、PPKでは後処理中により多くのベースステーションを使用できるため、精度がさらに向上します。 コストの削減:PPKは、リアルタイム通信を必要としないためRTKよりも安価です。RTKでは、追加の機器やサブスクリプション料金が必要になる場合があります。 |
後処理時間が長い:PPKではデータの後処理が必要であり、それに時間がかかったり、最終的な結果を得るのが遅れたりする場合があります。 高度なスキルが必要:PPKでは、データの後処理を実行するためのハイレベルのスキルが必要です。そのため、すべてのユーザーが利用できるわけではありません。 最低限の飛行時間が必要:正確な測位データを得るには、飛行中に十分なGNSSデータポイントを取得する必要があります。つまり、PPK処理に十分なデータポイントを取得するために、一定の時間と距離のドローンの飛行が必要になるということです。必要な時間と距離は、使用するGNSSレシーバーやベースステーションのデータの品質、飛行環境などのさまざまな要因によって異なります。一般的に、正確なPPK処理を行うのに十分なGNSSデータポイントを取得するには、10分以上飛行することが推奨されています。ただし、これはマッピングプロジェクトの具体的な要件や、収集されたGNSSデータの品質によって異なる場合があります。 |
マッピングプロジェクトにPPK、RTKのどちらを使用するかは、最終的には柔軟性やコスト、ミッションの規模など、それぞれの要件次第となります。どちらの方法にも長所と短所がありますが、DJI EnterpriseのRTKドローンでは、常に衛星観測データが記録されています。これにより、RTKでの飛行中にモバイル通信が不安定になり、リアルタイム通信が中断されたとしても、ベースステーションのデータを取得し、PPK法をバックアップとして使用することで、センチメートルレベルの正確なデータを出力できます。
PPKのハードウェアとソフトウェアの準備
|
UAVとペイロードのハードウェア(提供されるオプションの内の1つ) |
Matrice 300 RTK + Zenmuse P1 |
|
飛行ミッション計画用ソフトウェア |
DJI Pilot 2アプリ |
|
ベースレシーバーに依存しないデータ交換(RINEX:Receiver Independent Exchange )ファイルおよびナビゲーションファイルのソース |
DJI D-RTK 2ベースステーション |
| 専用PPKソフトウェア(提供されるオプションの内の1つ) |
Propeller Aero |
| 写真測量ソフトウェア |
DJI Terra |
一般的なワークフロー
ドローンの画像データを使用したPPKプロセスの実行は困難に見えるかもしれません。しかし実際には、慎重な計画と実行が必要ではあるものの、単純なプロセスです。このプロセスには、いくつかの重要な手順が含まれています。これらの手順について、以下で詳しく説明しています。
- 設定と準備:ドローンデータの収集を開始する前に、ミッションを慎重に計画する必要があります。まず、飛行時間が十分長く、DJI Pilotアプリ内でいくつかの設定が有効になっていることを確認する必要があります。ミッションを慎重に計画すれば、正確なPPK処理を行うために十分なデータを確実に収集することができます。
- ドローンデータの収集:ミッションを計画したら、次にドローンを飛行させ、画像データと対応するGNSSデータをドローンのレシーバーから収集します。このGNSSデータには、生の衛星航法システムデータとタイムスタンプ情報が含まれている必要があります。PPK処理を正確に行うには、できるだけ多くのデータを収集する必要があります。
- 基準データの収集:ドローンデータの収集に加えて、CORSやその他の地上ベースのレシーバーなど、近くのGNSSベースステーションから基準データも収集する必要があります。基準データには、ドローンGNSSデータと同じGNSS信号とタイミング情報が含まれている必要があります。基準データを収集することで、PPKの結果を可能な限り正確にすることができます。
- データの位置合わせとPPK処理:必要なデータをすべて収集したら、タイミング情報に基づいて、ドローンの画像データと対応するGNSSデータの位置合わせを行う必要があります。これは、画像キャプチャとGNSSデータポイント間のタイミング情報を一致させることができる専用のソフトウェアツールを使用して行います。データの位置合わせを行った後、専用のPPKソフトウェアまたはオンラインサービスを使用してデータを処理できます。PPK処理では、ドローンのレシーバーとベースステーションの両方からのGNSSデータを使用して、飛行中に撮影された各画像の正確な測位情報を計算します。
- POSデータの上書き:新しいPOSデータが写真測量ソフトウェアに正しくインポートされていることを確認します。写真測量モデルの精度は入力データの品質に大きく左右されるため、この手順は非常に重要です。したがって、POSデータとソフトウェアの互換性を慎重にチェックし、正しく上書きされていることを確認する必要があります。
ドローンの画像データを使用したPPKプロセスは複雑に見えるかもしれませんが、正確なマッピング結果を得るには、このプロセスが必要です。ミッションを慎重に計画し、十分なデータを収集し、品質管理チェックを実施することで、可能な限り正確な結果が得られます。
設定と準備
ドローンを飛行させる前に、DJI Pilot 2アプリを正しく設定することが重要です。以下に、飛行を成功させるためのヒントを示します。
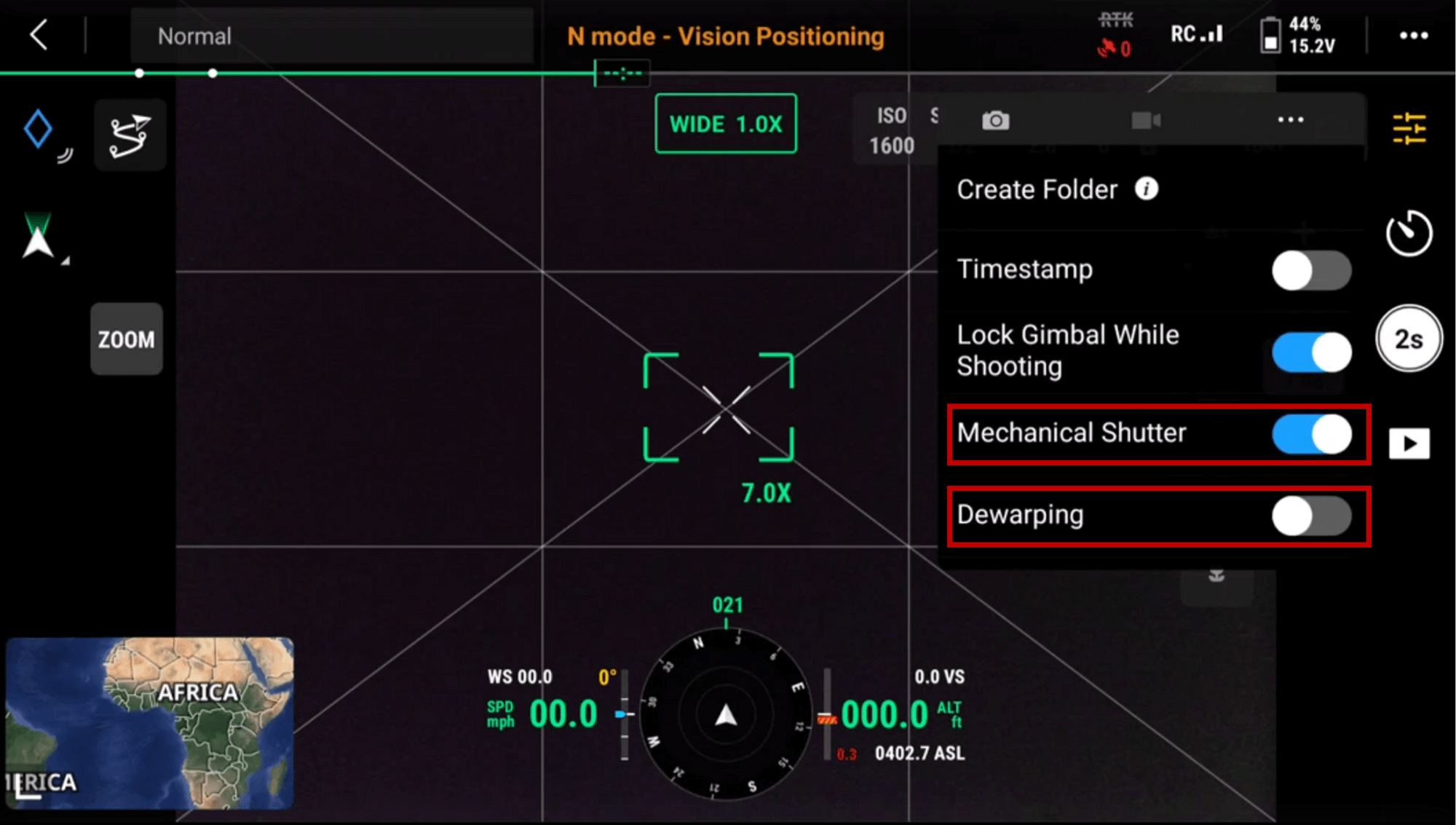
- [メカニカルシャッター]オプションを有効にし、[歪み補正]オプションを無効にします。
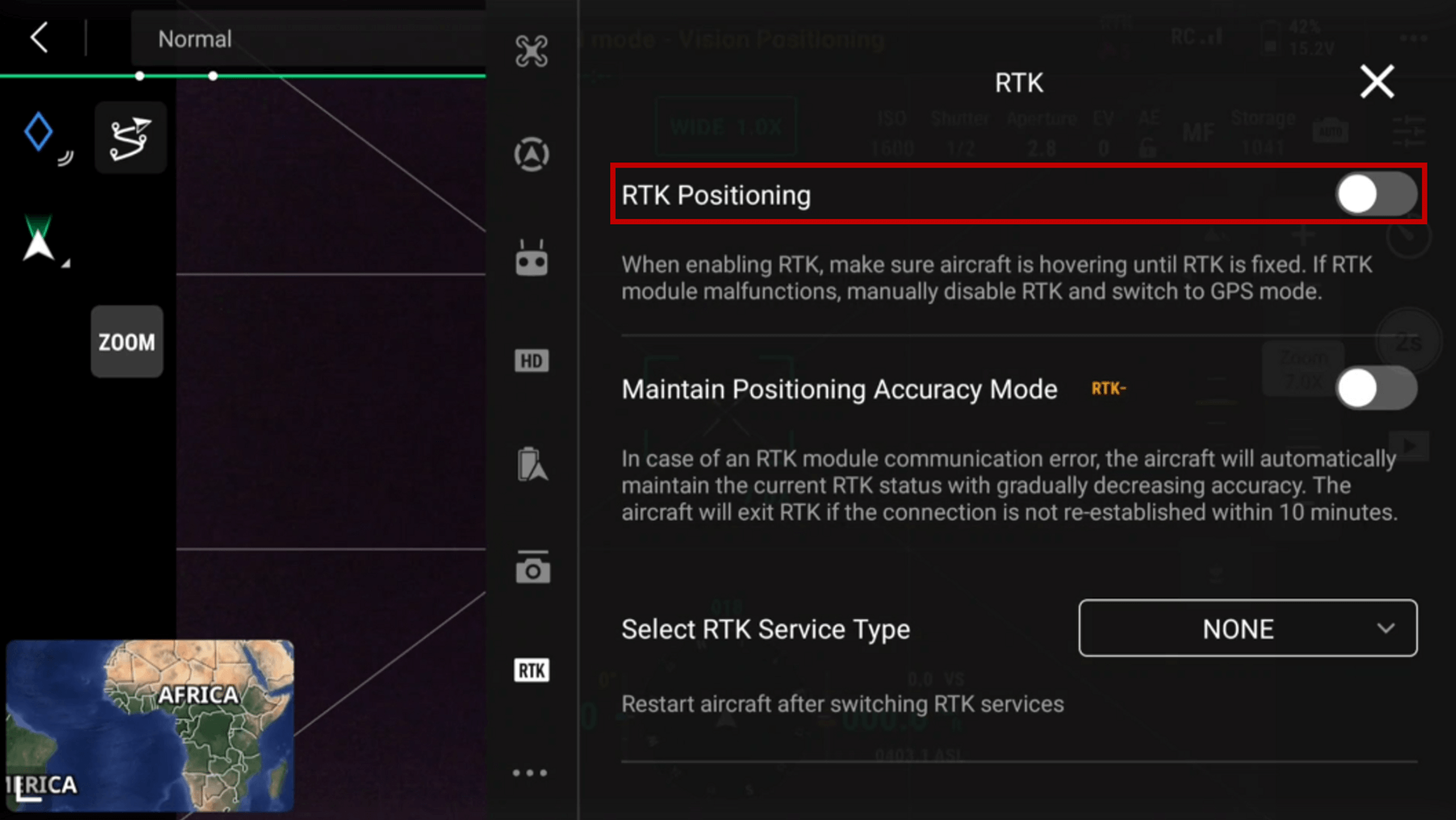
- Pilotアプリの設定でRTKオプションが無効になっていることを確認します。
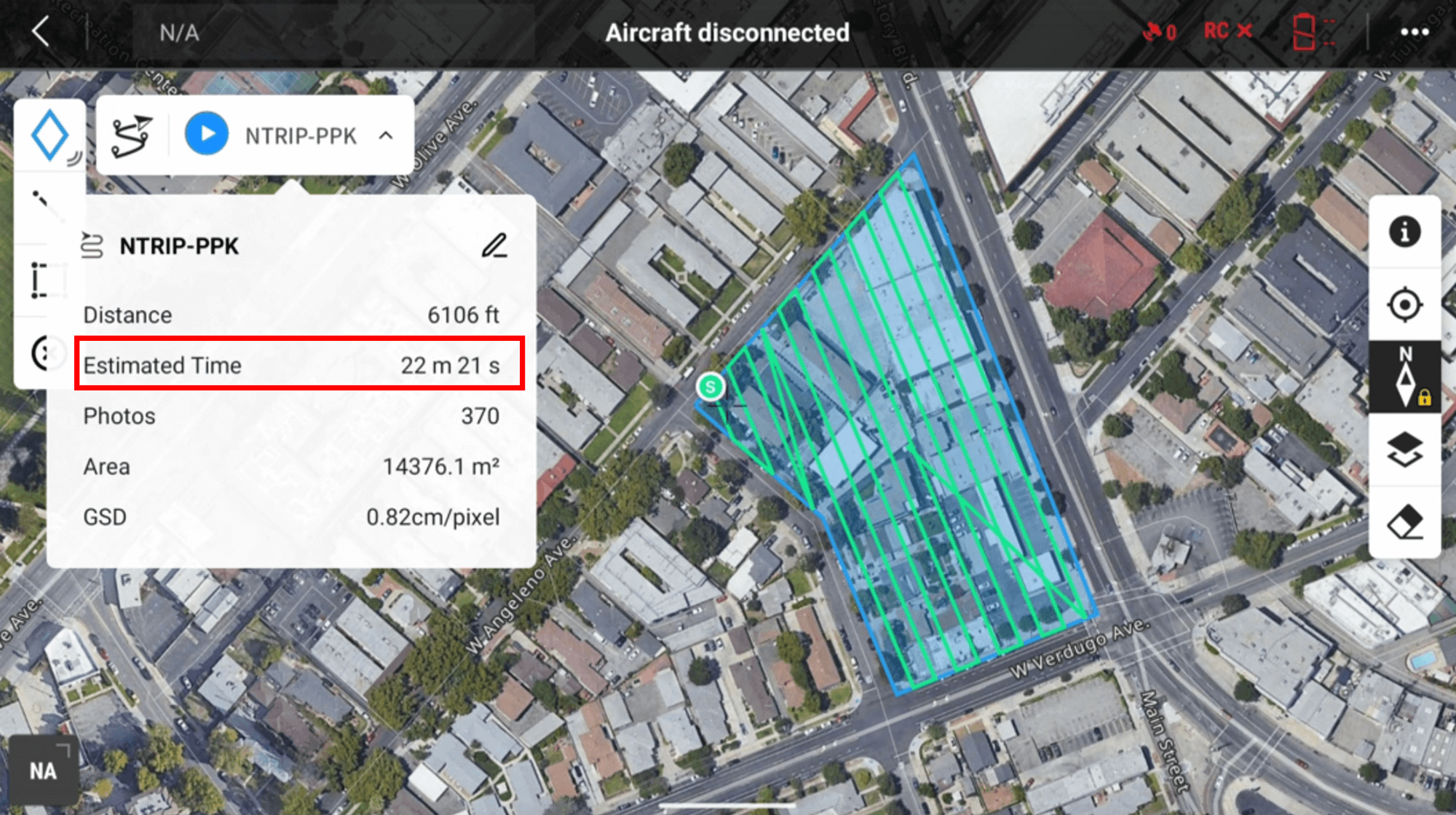
- PPKではデータの後処理が必要であり、それに時間がかかったり、最終的な結果を得るのが遅れたりする場合があることに注意することが重要です。さらに、PPKを使用して正確な測位データを取得するには、飛行中に十分なGNSSデータポイントを取得する必要があります。必要な時間と距離は、使用するGNSSレシーバーやベースステーションのデータの品質、飛行環境などのさまざまな要因によって異なります。一般的に、正確なPPK処理を行うのに十分なGNSSデータポイントを取得するには、10分以上飛行することが推奨されています。Pilotアプリでは、ミッション概要ドロップダウンタブの下で概算飛行時間を確認できます。
ドローンデータの収集
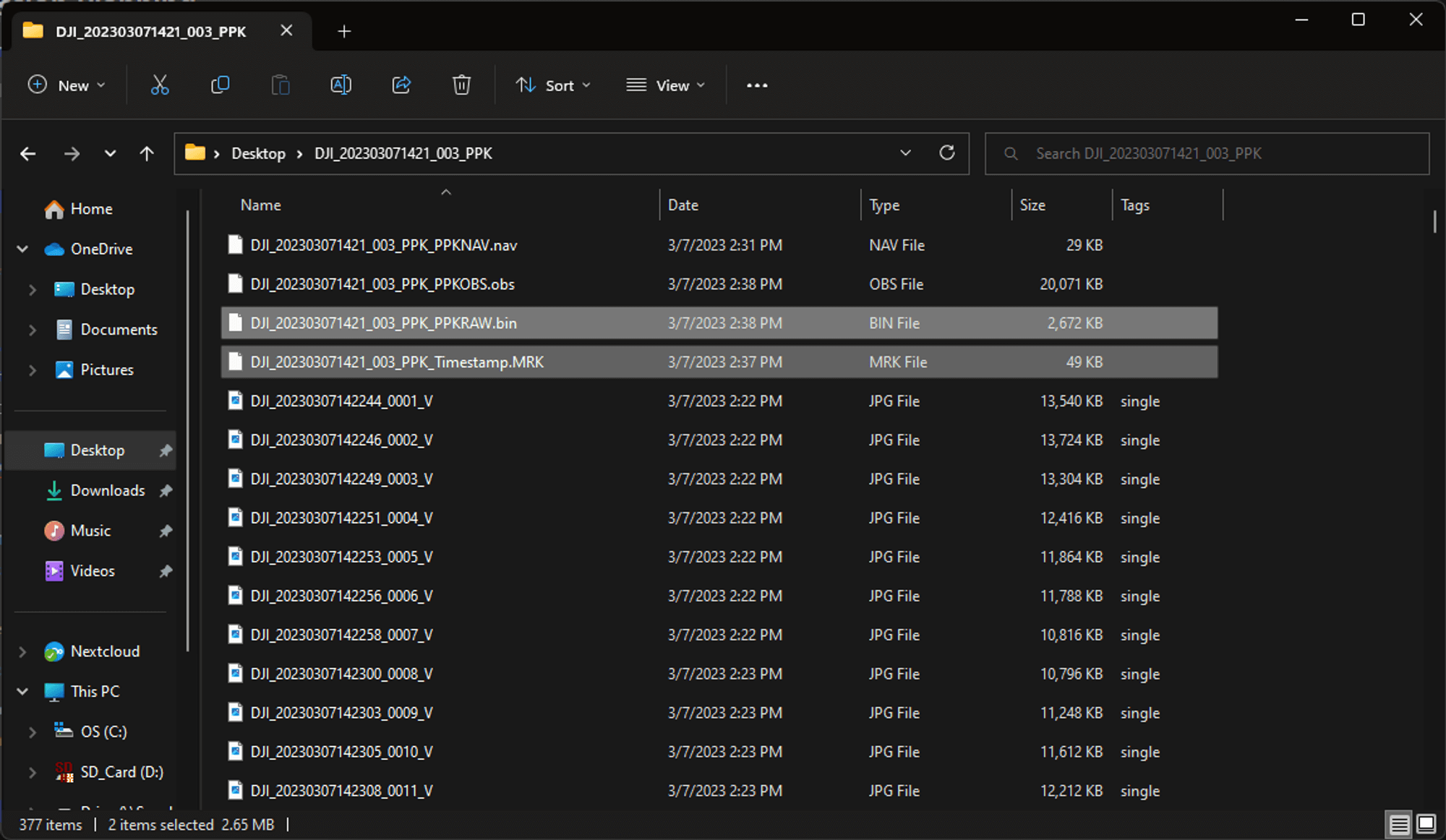
PPK法で正しく処理を行うには、ドローンデータが不可欠です。生画像に加えて、ドローンのレシーバーに依存しないデータ交換(RINEX)ファイルと画像タイムスタンプファイルの2つの追加ファイルが画像フォルダーに必要です。
ドローンのRINEXファイルには、高精度の測位を実現するために重要な、生のGPS測定値が含まれています。このデータは、大気条件やGPS衛星の位置などの種々の要因によって発生する可能性がある、GPS信号のエラーを補正するために使用されます。このデータがなければ、PPK法の精度が著しく低下する可能性があります。RINEXファイルは、XXX_PPKRAW.binという名前で、生写真フォルダー内にあります。
同様に、正確な結果を得るには、画像タイムスタンプファイルが重要です。このファイルには、各画像が撮影された正確な時刻が記録されます。これは、画像データをGPS測定値と正しく同期させるために必要です。この情報がなければ、画像データとGPSデータの正確な位置合わせが非常に困難になり、最終結果の精度に悪影響が及びます。このタイムスタンプファイルも、XXX_Timestamp.MRKという名前で生写真フォルダー内にあります。
PPK法で得られる最高の精度を実現するためには、これらのファイルを正しく収集・処理する必要があります。なお、これらのファイルを出力できるのは、以下に示すRTK/PPK対応の一部のDJI Enterpriseのドローンモデルのみです。
DJI M300 RTK (ペイロードがZenmuse P1またはZenmuse L1の場合のみ)DJI Mavic 3 Enterprise (RTKモジュールを取り付けた場合のみ)
DJI Mavic 3 Multispectral (RTKモジュールを取り付けた場合のみ)
DJI Phantom 4 RTK
基準データの収集
基準データのベースステーションを使用してPPK(後処理キネマティック)処理を実行するには、通常、GNSS(全地球航法衛星システム)データに関連する次の2種類のファイル(ベースRINEXファイルとナビゲーションファイル)が必要です。
- ベースRINEXファイル:このファイルには、ベースステーションによって収集された生のGNSSデータが含まれています。通常はRINEX形式です。ベースRINEXファイルには、衛星信号、位置、タイミング情報の正確な測定値が含まれています。このファイルは通常、ドローンの飛行と同時に、または飛行時刻にできるだけ近い時刻に収集されます。ベースRINEXファイルは、飛行中にドローンが収集した生GNSSデータを補正するための基準として使用されます。
- ナビゲーションファイル:このファイルには、マッピングプロジェクトに使用されるGNSS衛星の位置と軌道に関する情報が含まれています。ナビゲーションファイルを使用して、ドローンの飛行中に撮影された各画像の正確な位置情報をPPKソフトウェアが計算します。ナビゲーションファイルは、米国測地測量局(NGS)などの政府機関や国際GNSS事業(IGS)などのオンラインサービスといった、さまざまなソースから取得できます。
この手順のセクションでは、例としてNGS CORSを使用して、これらのGNSSファイルを取得します。
NOAA(アメリカ海洋大気庁)のUFCORS(ユーザーフレンドリーCORS)サービスを使用してCORS基準データを収集するには、次の手順に従ってください。
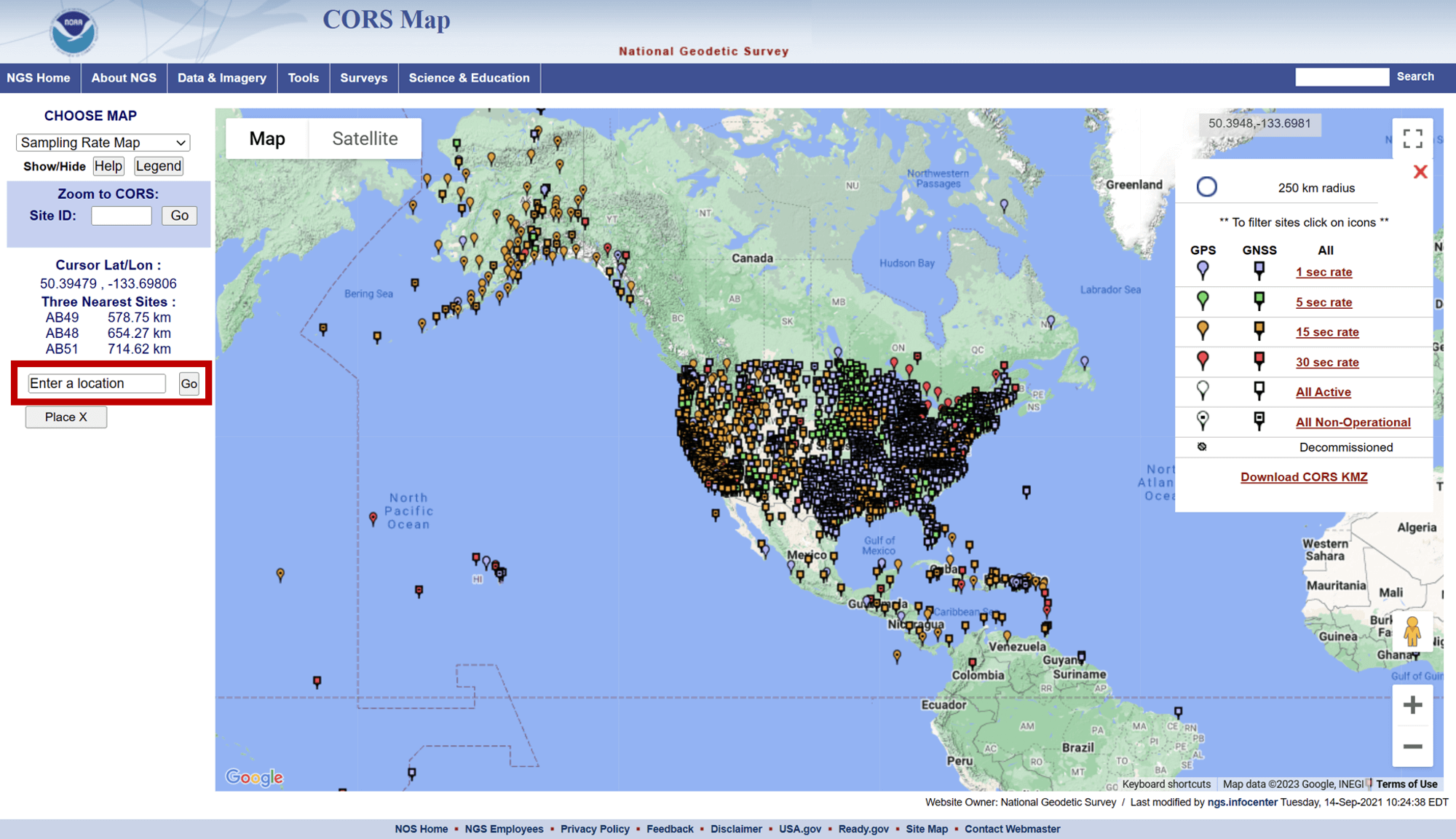
- NCNのウェブサイトにアクセスし、ウェブページ上の[NCNマップ]を選択します。
- 左側の検索ボックスにドローンが飛行する場所の住所を入力し、[Go]を選択します。
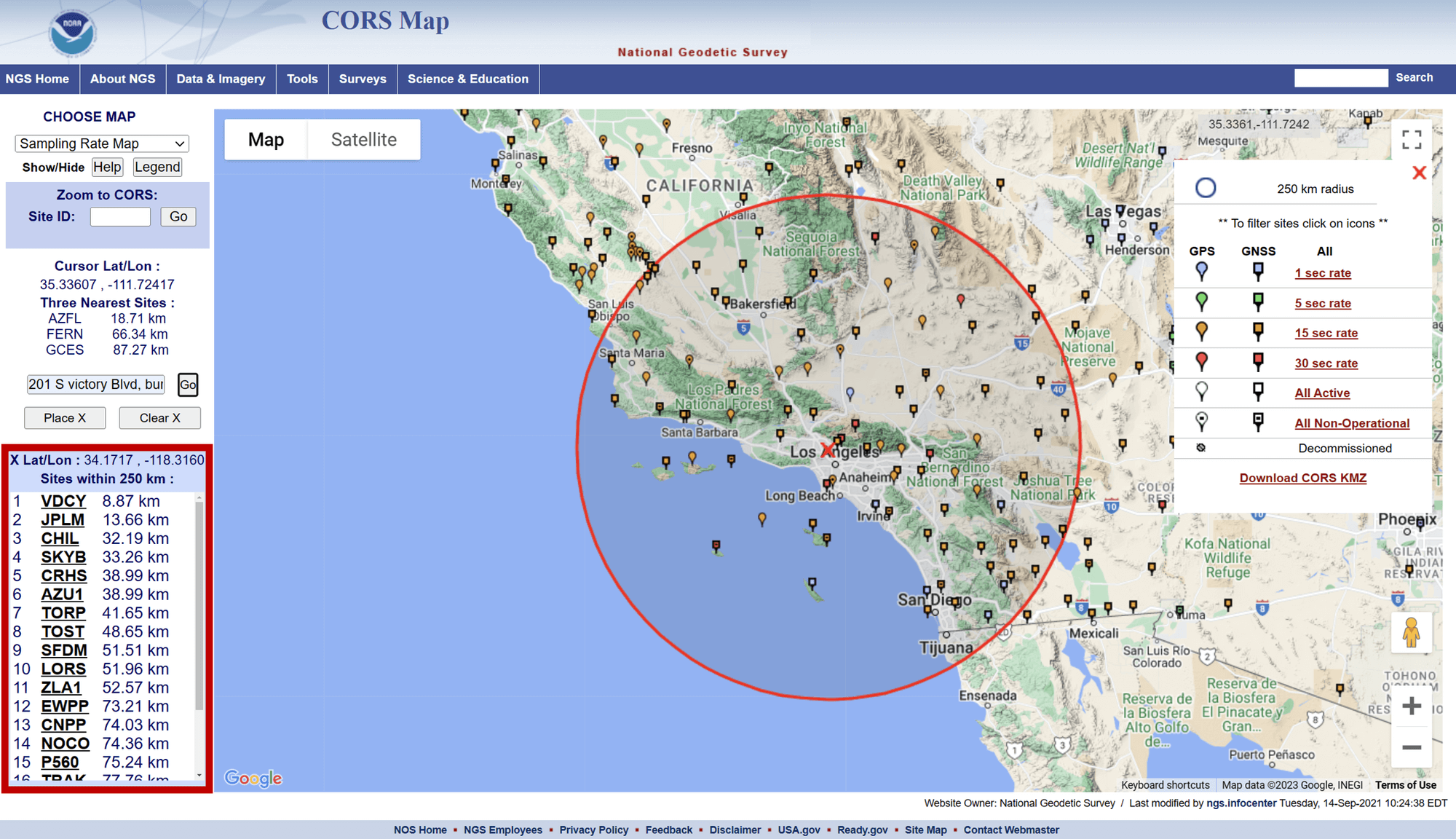
- できるだけベースラインが短いサイトを選択し(ベースラインとは、GNSSベースステーションとドローンの間の距離を指します。一般的には、ベースライン距離を短くするとPPKの精度が高くなります。これは、大気条件やその他の環境要因によって発生するエラーの可能性が少なくなるためです)、そのサイト名を記録します。CORSサイトとドローン間のベースライン距離は、PPKプロセスに使用される基準データの品質に影響する可能性があります。ベースライン距離が長いと、大気やその他の環境要因によるエラーが大きくなり、PPKの結果の精度が低下する可能性があります。そのため、マッピングエリアをカバーしながら、ベースライン距離をできるだけ短くすることをお勧めします。ベースラインが20マイルを超えるサイトは使用しないことをお勧めします。
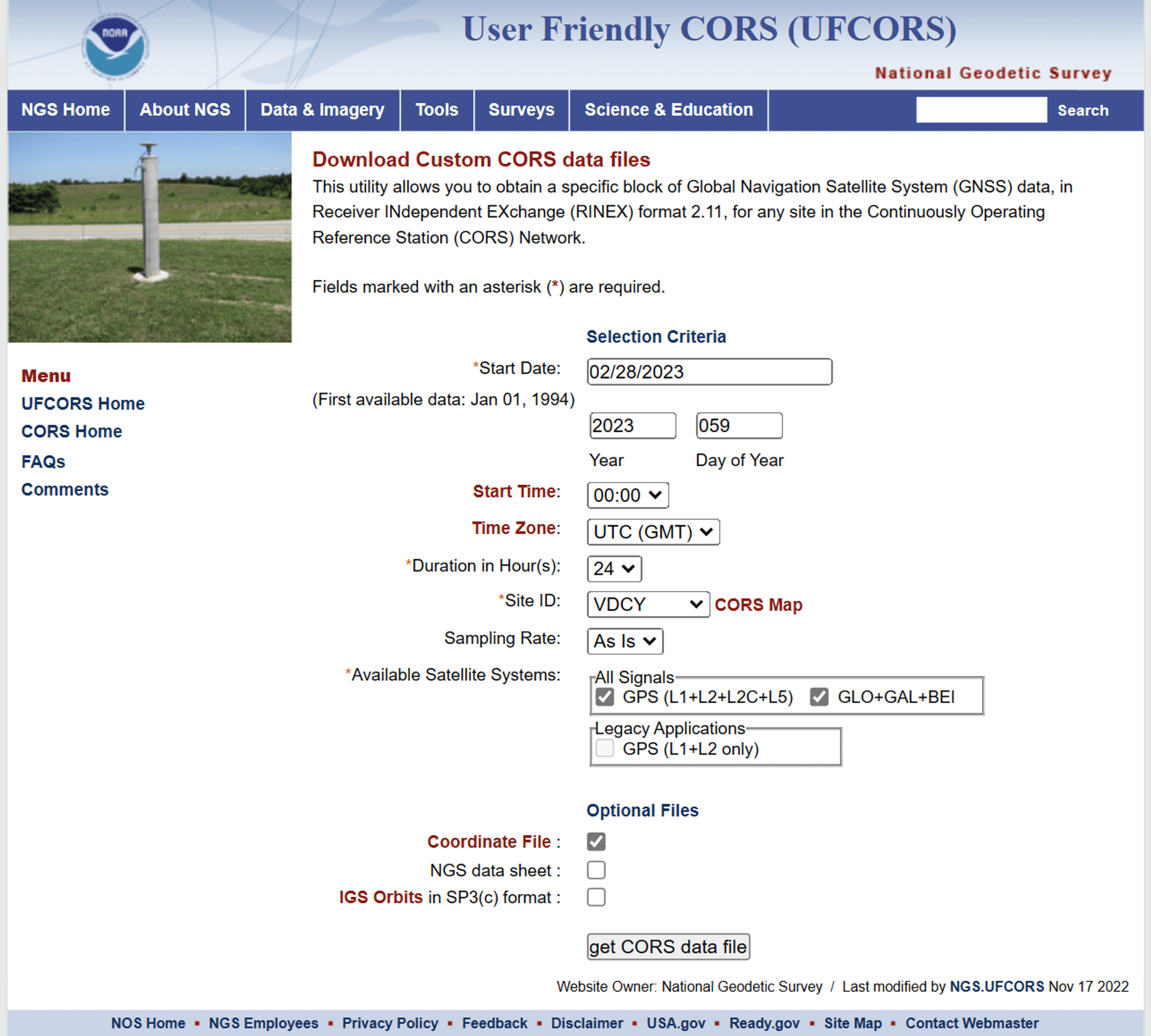
- UFCORSのウェブサイトに移動し、取得したいデータのデータ範囲を選択します。[CORSデータファイルを取得]を選択すると、データが圧縮ファイル(.zipなど)としてダウンロードされます。正確なPPK処理を確保するために、CORSデータがドローンの画像データと同時に収集されるようにすることが重要です。また、CORSデータの品質を慎重に評価して、マッピングプロジェクトに必要な精度基準を満たしていることを確認する必要があります。正確なPPK処理と高品質なマッピング結果を確保するには、ドローンミッションとCORSデータ収集の正しい計画と実行が不可欠です。
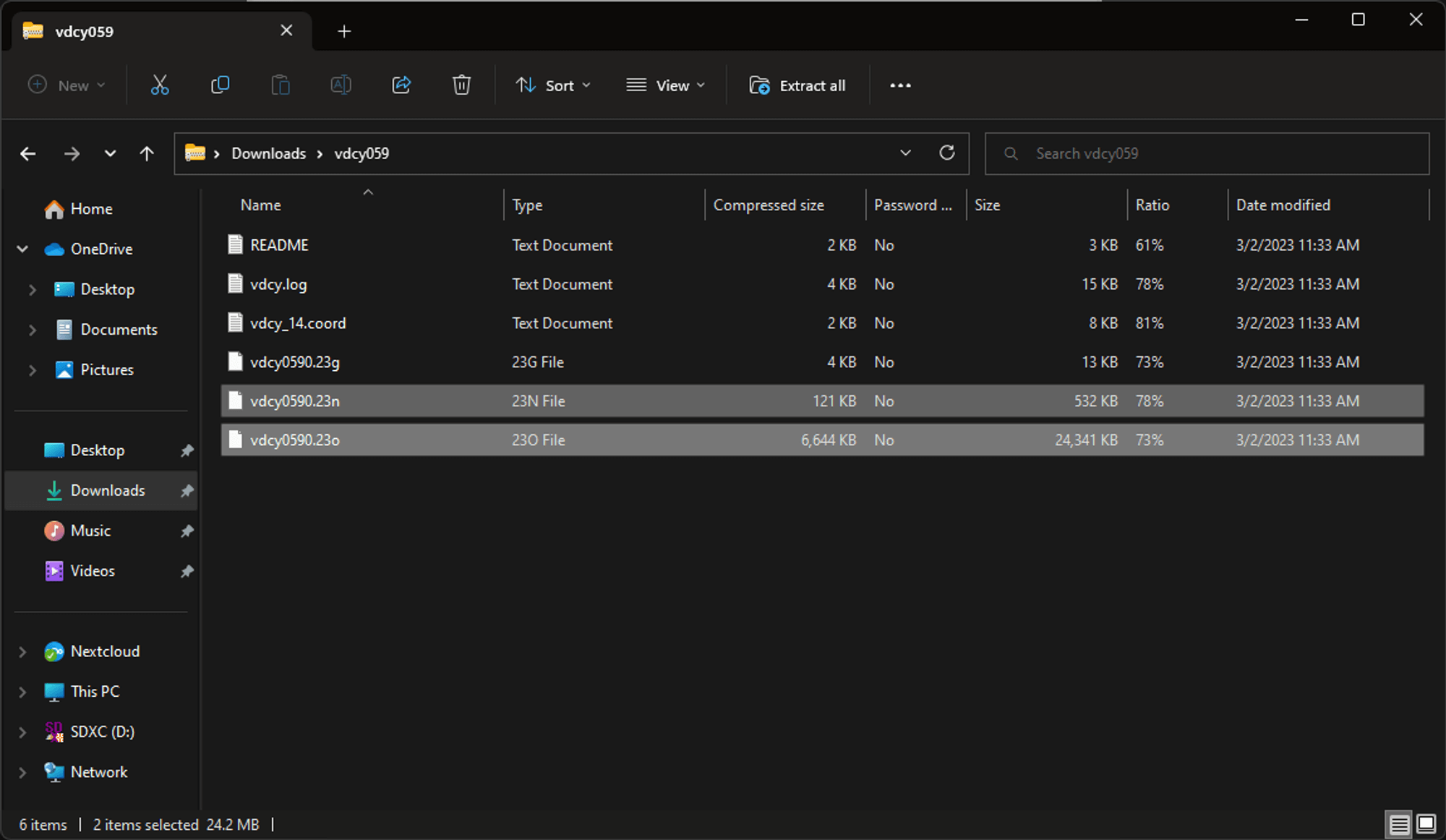
- ダウンロードしたzipファイルを開き、zip ファイルにxxx.xxo(ベースRINEXファイル)とxxx.xxn(ナビゲーションファイル)の2つのファイルが含まれていることを確認します。
ドローンオペレーションサイトの近くにNGS CORSベースステーションがない場合、DJI D-RTK2モバイルステーションでPPK処理用のベースステーションデータを取得するのがよいでしょう。これを使用するには、WGS84座標で既知の点にあるベースステーションとその楕円体高(メートル)を設定します。次に、Pilot 2アプリの既知の3D点座標に基づいて、ベースステーションの位置をオフセットします。
必ず最初にD-RTK2を現場で設定し、飛行時間全体をカバーするため、飛行の前後数分間待ってください。また、ドローンの飛行中にD-RTK2ベースステーションを動かしたり傾けたりしないでください。向きが変わることで、データの記録が中断される可能性があります。飛行が完了したら、ベースステーションをUSB-Cケーブルでコンピュータに接続し、飛行後に記録された.dat形式のRTCM(Radio Technical Commission for Maritime:海事用無線技術委員会)ファイルをエクスポートします。DJI D-RTK2モバイルステーションを使用すると、リアルタイム通信に必要な追加の機器やサブスクリプション料金が不要になります。これにより、PPKプロセスの費用対効果が向上し、特にモバイル通信のサービスエリアに制限があったりサービスエリア外になる地域では、データ収集の柔軟性を高めることができます。
データの位置合わせとPPK処理
このセクションでは、NGS CORS、サードパーティ製ベースステーション、またはDJI D-RTK2モバイルステーションから収集したGNSSローバーファイルを使用して、PPKプロセスを開始するためにドローンデータを適用するための詳細手順を説明します。例として、RedCatch REDToolBoxを使用します。
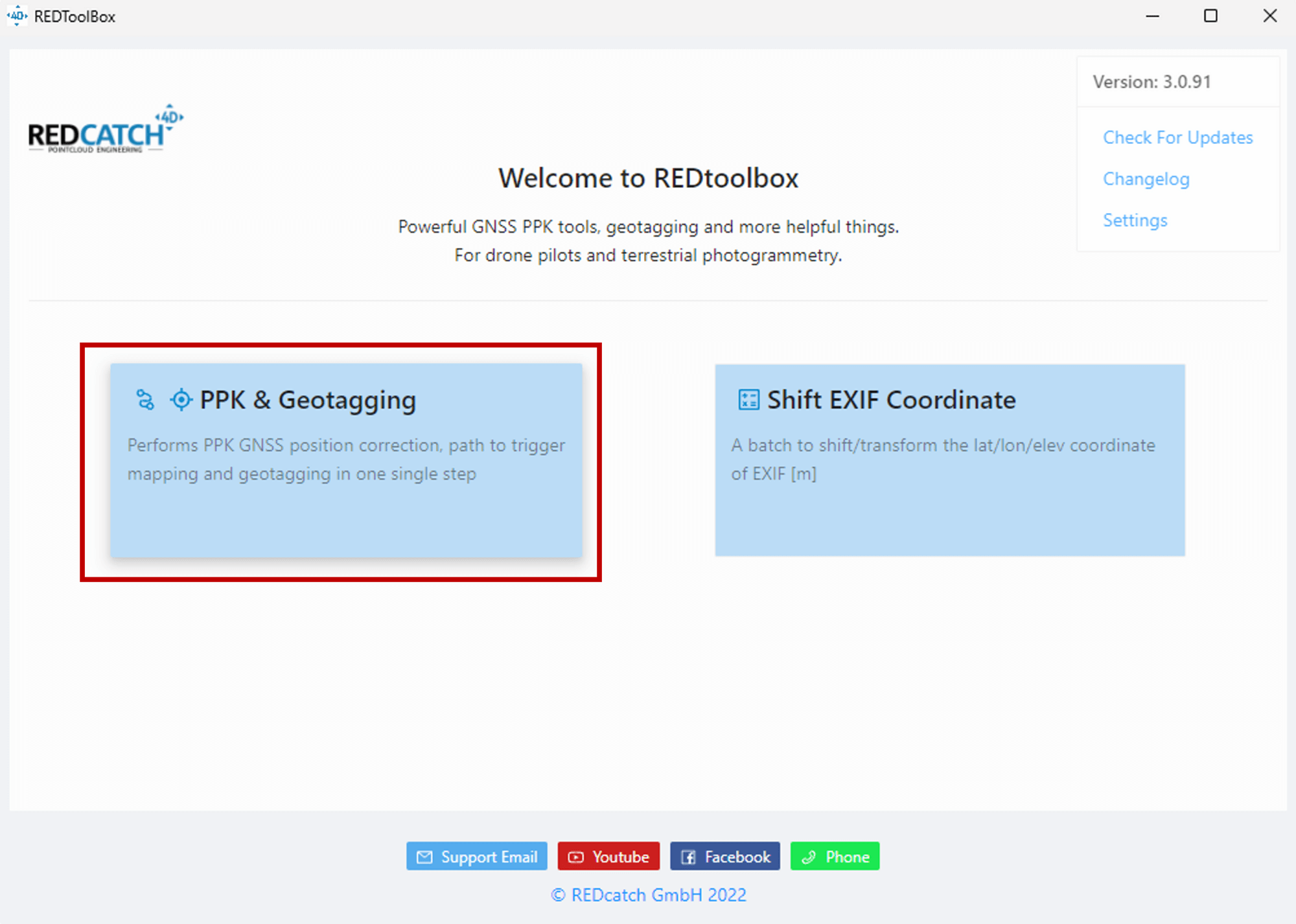
- 開始するには、RedCatch REDToolBoxを開き、[PPK、及びジオタググ]オプションを選択する必要があります。
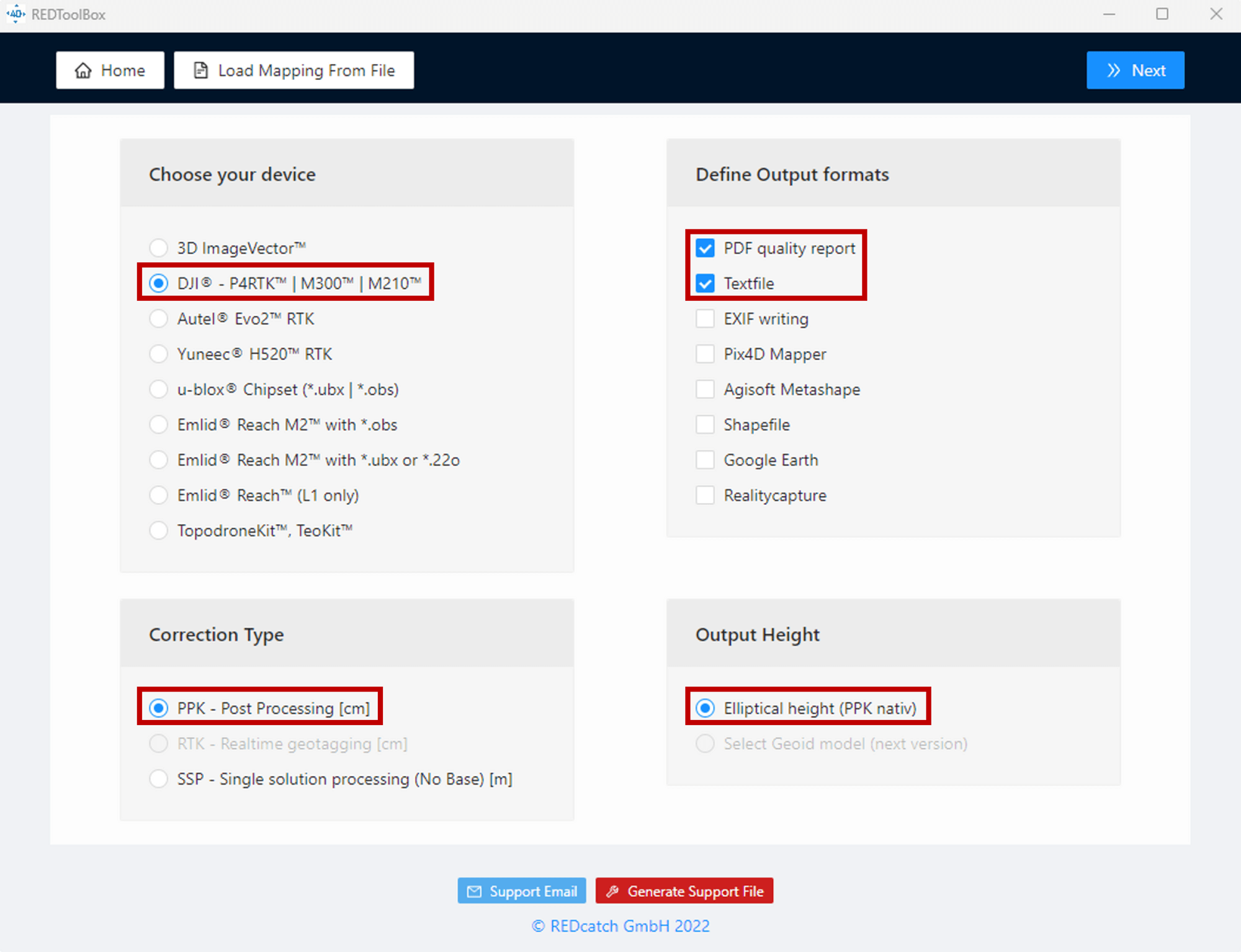
- このオプションでは、デバイスオプションとしてDJIを選択し、出力形式としてPDF品質レポートとテキストファイルを選択するよう求められます。次に、補正タイプとして[PPK]オプションを選択し、出力の高さとして[楕円高さ(PPKネイティブ)]を選択します。これらの選択後、[次へ]をクリックします。
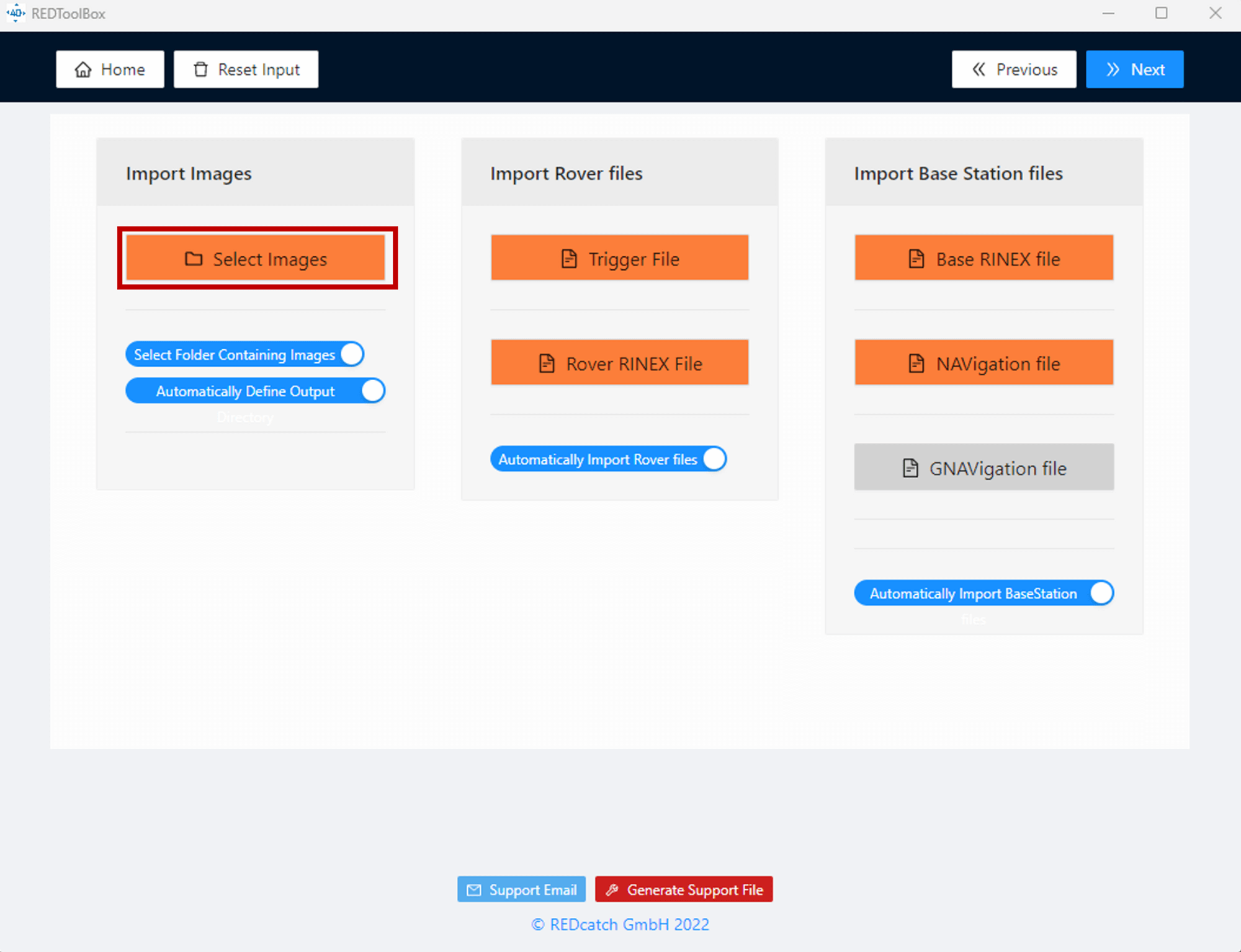
- 画像をインポートするには、[画像のインポート]セクションに移動し、[画像の選択]を選択して、生画像のディレクトリを定義します。これにより、画像が正しくインポートされ、PPKプロセスで使用できるようになります。
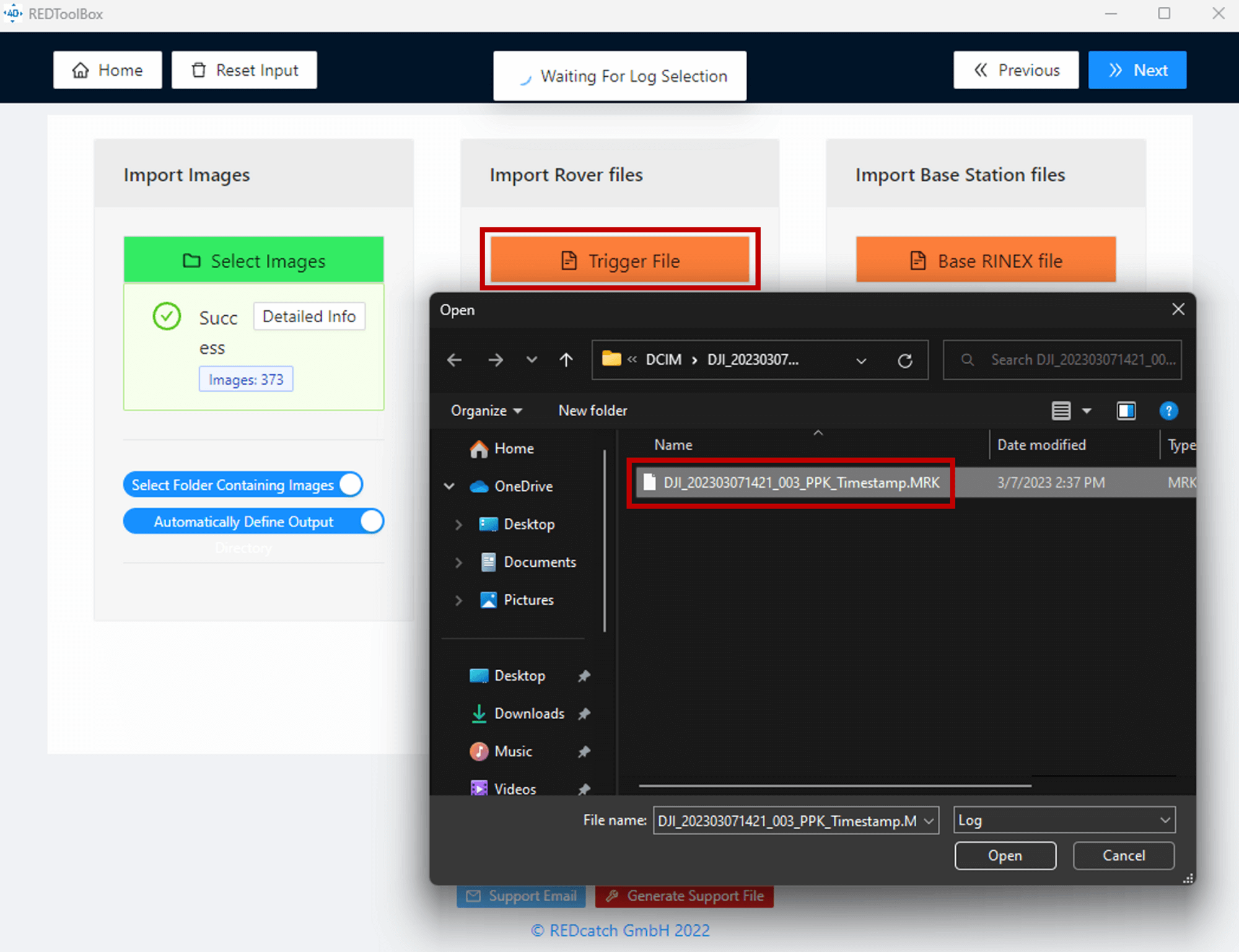
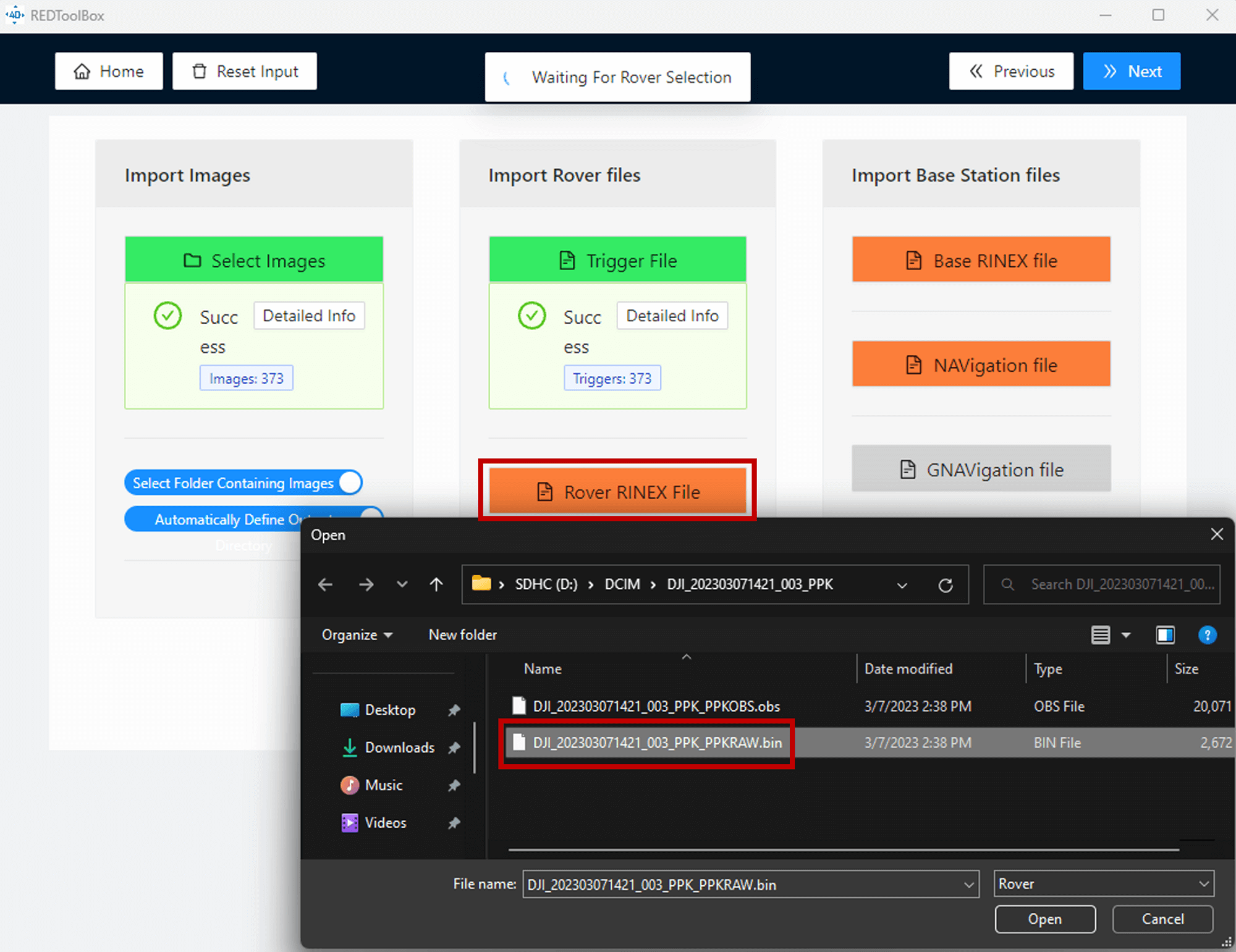
- 次に、[ローバーファイルのインポート]セクションを選択し、[トリガーファイル]オプションを選択する必要があります。ここでは、生画像フォルダーにある「XXX_Timestamp.MRK」という名前のMRKファイルをインポートできます。このファイルには、PPKプロセスで使用される画像タイムスタンプに関する重要な情報が含まれています。
- MRKファイルをインポートした後、[ローバーRINEXファイル]オプションを再度選択し、生画像フォルダーにある「XXX_PPKRAW.bin」という名前のRINEXファイルをインポートする必要があります。PPKプロセスを成功させるには、正しいファイルを選択することが重要です。
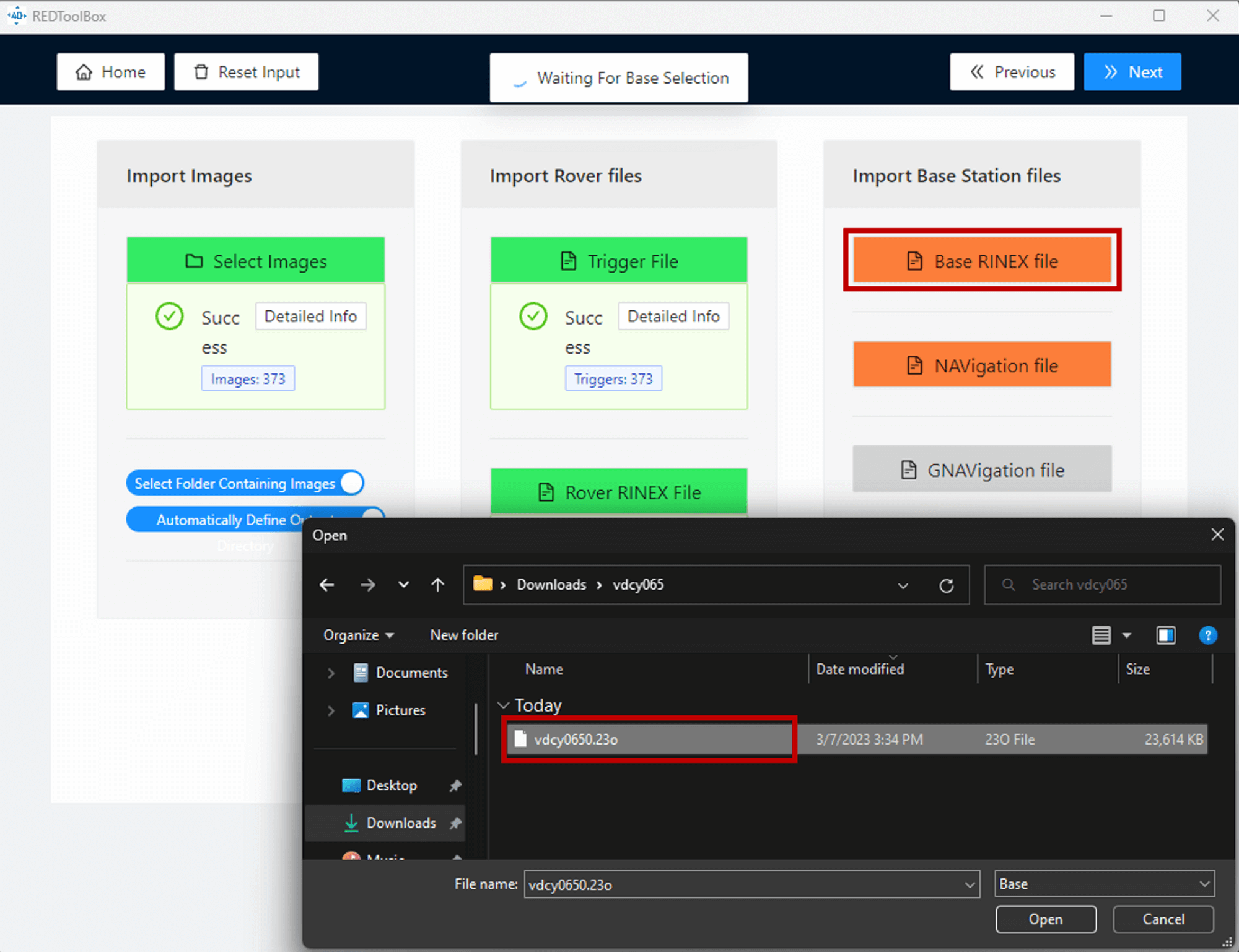
- [ベースステーションファイルのインポート]セクションに移動し、[ベースRINEXファイル]オプションを選択して、UFCORSサイトからダウンロードした生衛星データフォルダーから「XXX.xxo」という名前のRINEXファイルをインポートします。DJI D-RTK2モバイルステーションをPPK処理に使用している場合は、このオプションで.dat形式のRTCMファイルを選択してインポートします。複数の.dat RTCMファイルを1つのファイルにマージする必要がある場合は、次のツールを使用して、複数のRTCMファイルと同じディレクトリで実行します。merge_bin.bat
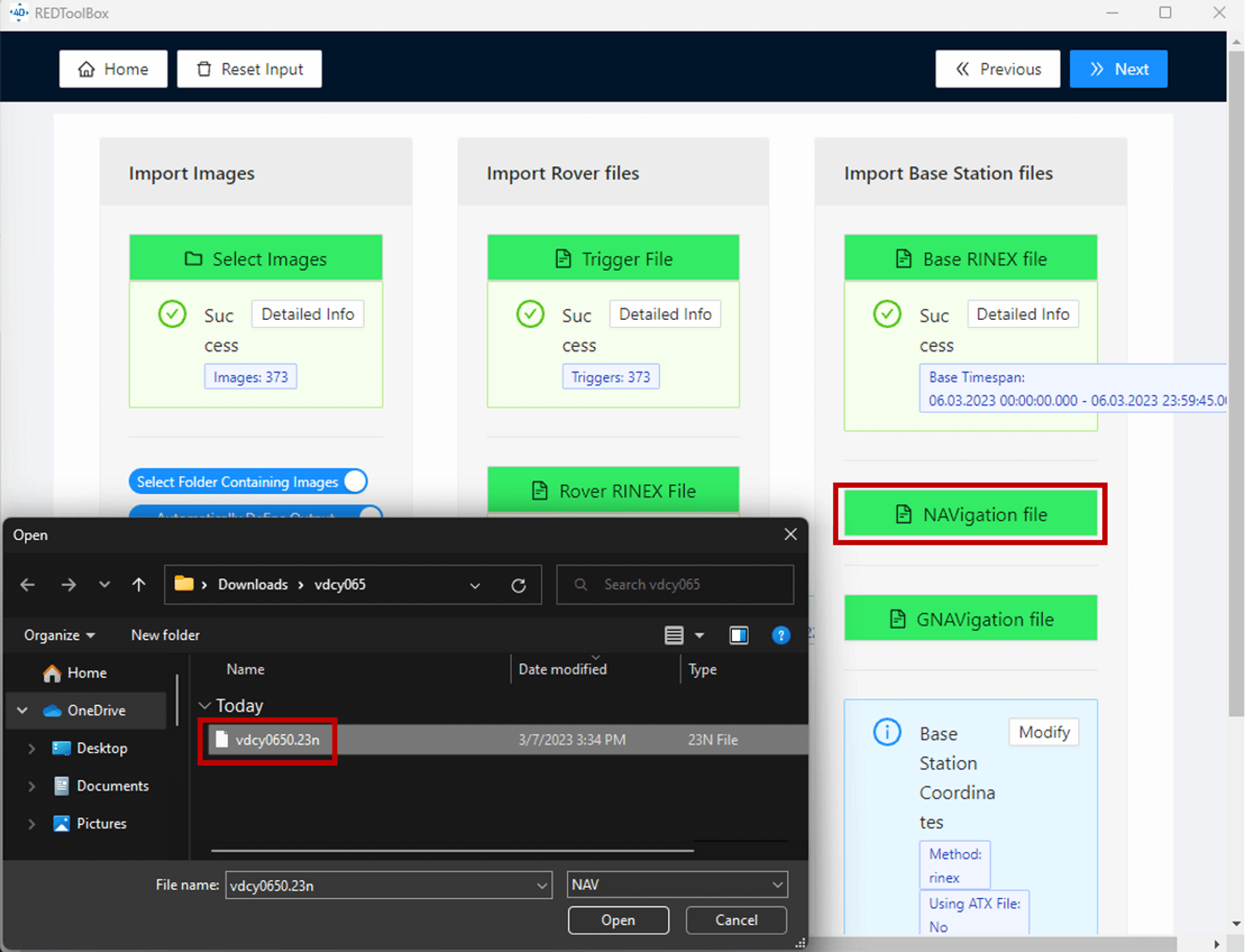
- 生の衛星データフォルダーからXXX.xxoファイルを選択すると、ナビゲーションファイルとGNAVigationファイルが自動的にインポートされます。インポートされない場合、これら2つのファイルはUFCORSサイトからダウンロードされた生衛星データフォルダー内にあります。
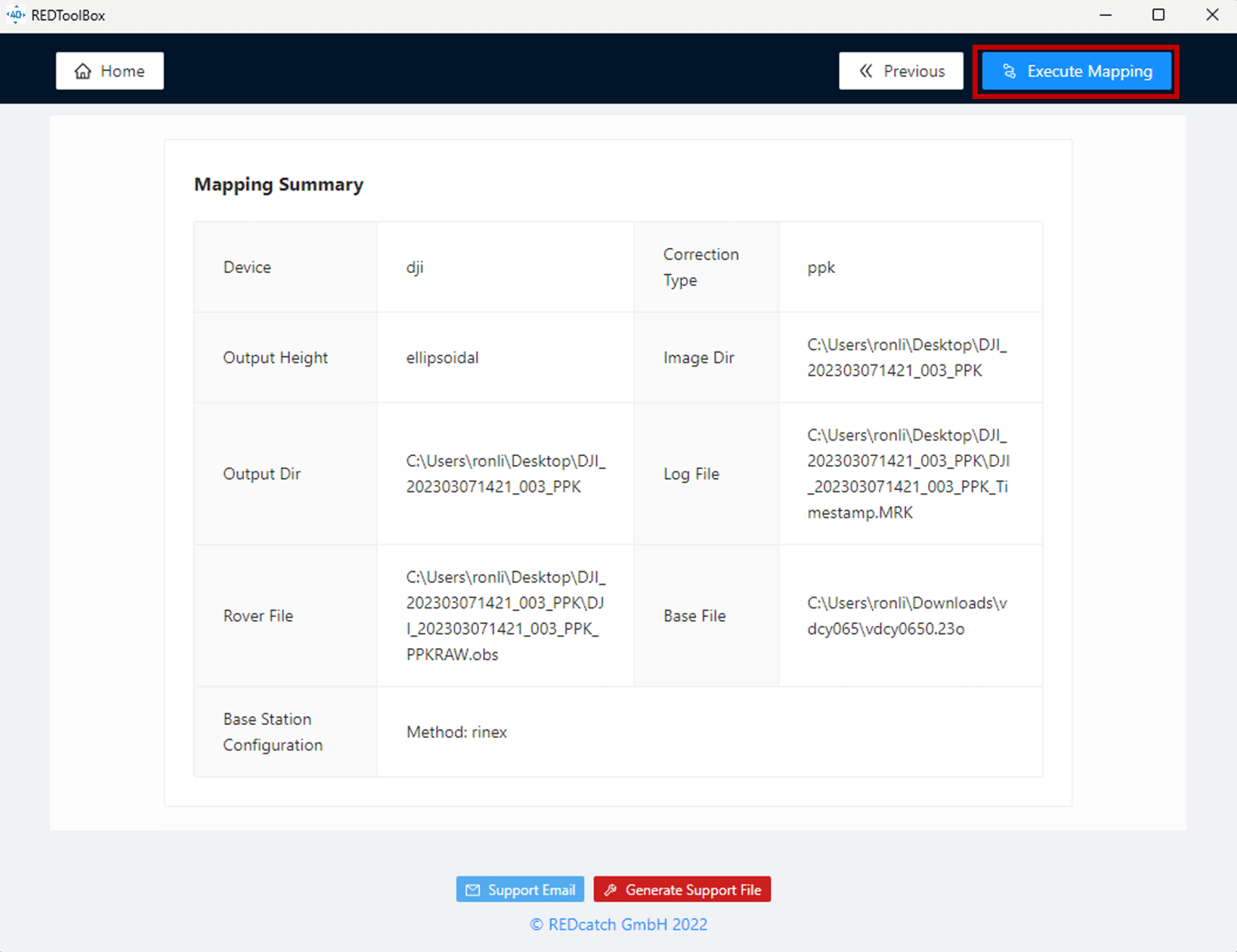
- 最後に、マッピングの概要を確認し、[マッピングを実行]を選択してPPKプロセスを開始します。
- プロセスが終了したら、[PDF品質レポート]と[テキストファイル]を確認して、[マッピングから出力を生成]オプションを選択します。
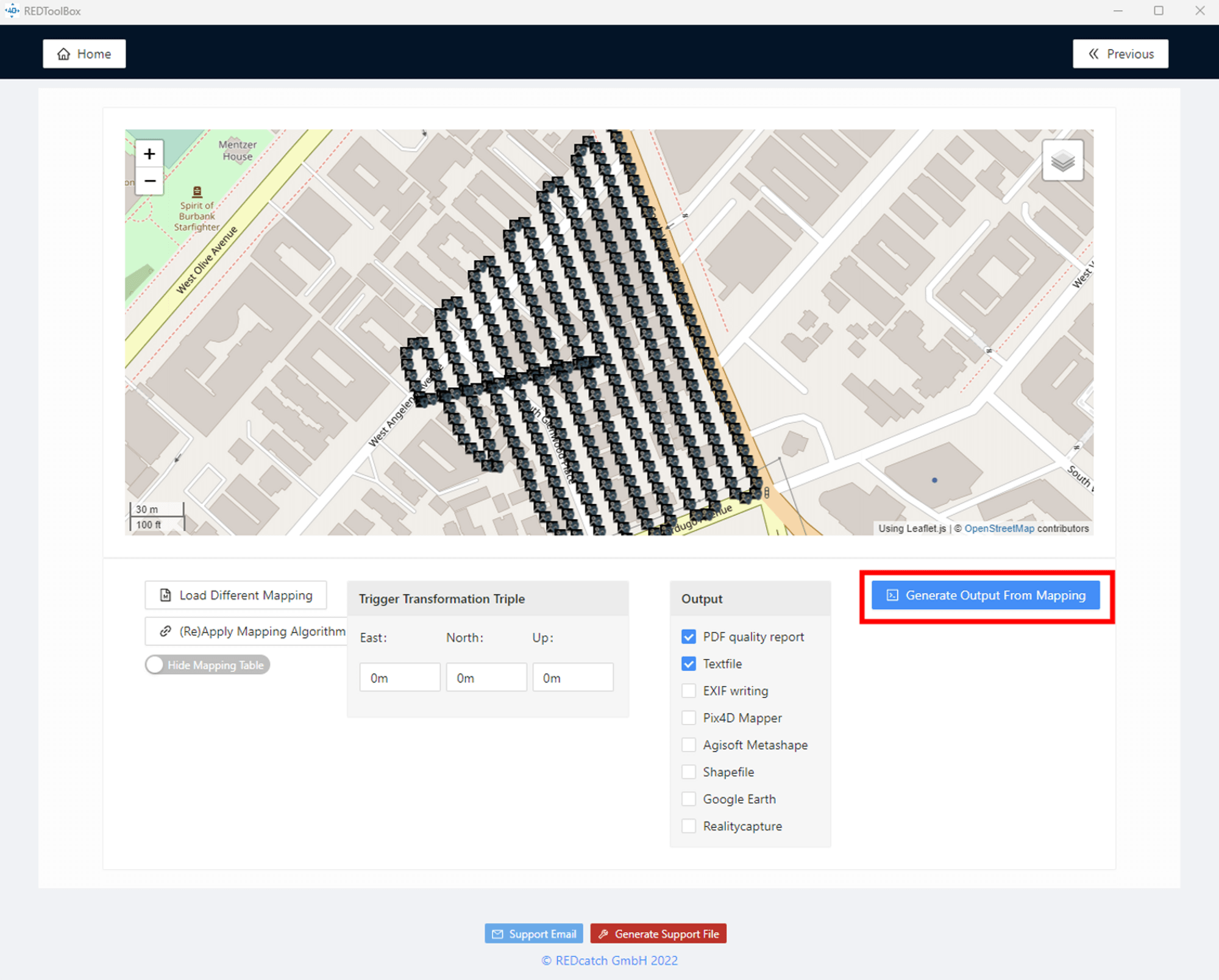
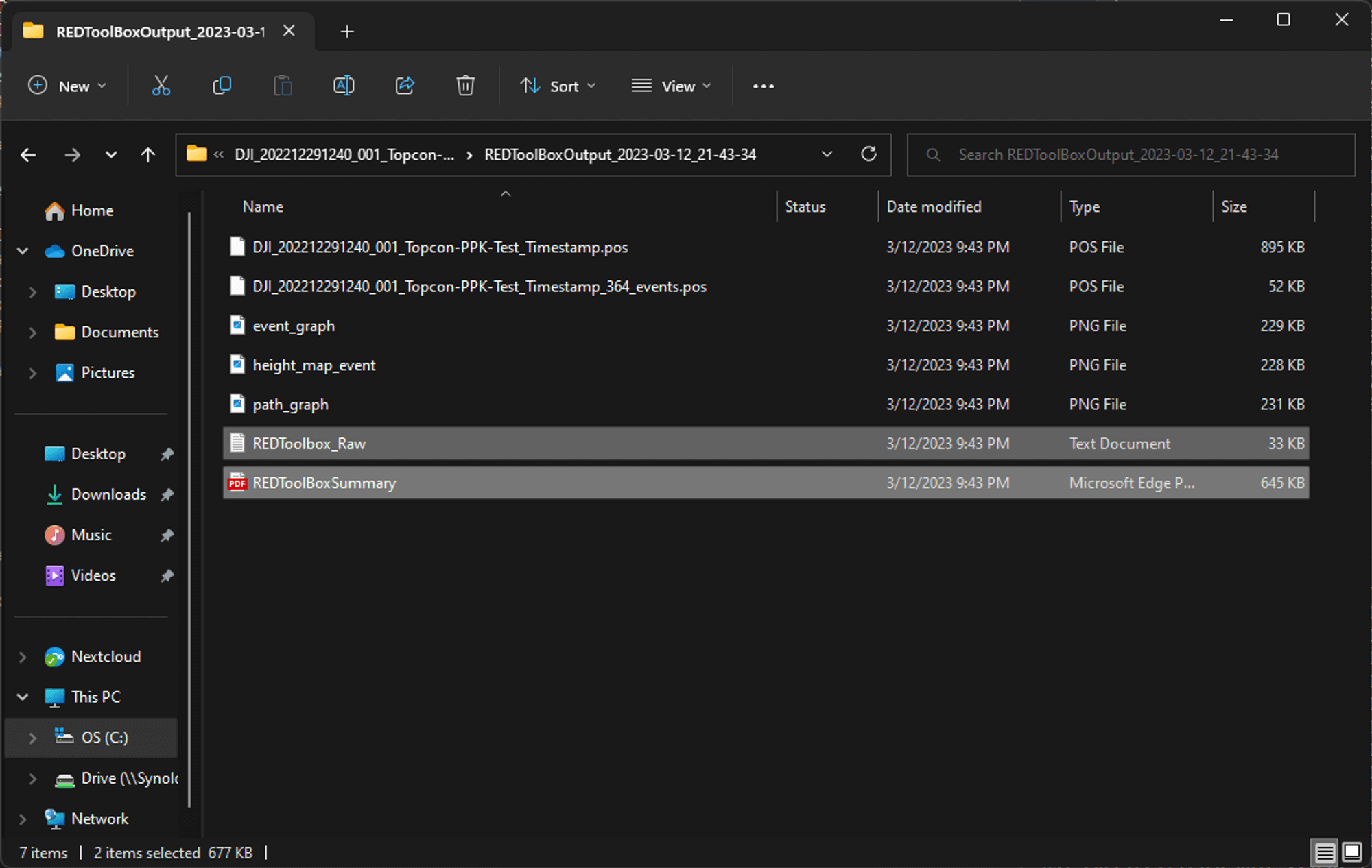
- 補正されたPOSデータ(REDToolbox_Raw.txt)と概要レポート(REDToolBoxSummary.pdf)の両方がエクスポートされていることを確認するには、出力フォルダーを開きます。その後、写真測量の処理には、補正された画像POSデータを含む最初のタイムスタンプファイルを使用します。
POSデータの上書き
ドローンの画像POS(位置および方位)データとは、画像を撮影する際のドローンの位GNSS測位置、姿勢、軌道に関する情報を指します。このデータは通常、ドローンに搭載されているGPSやその他のセンサーを使用して取得され、画像に地理的位置情報を正確に提供し、写真測量法を用いて調査対象エリアの3Dモデルまたはマップを作成するために使用されます。
写真測量プロセスでは、3D空間における各画像の位置と方位を正確に決定するために、空中三角測量プロセスでドローンの画像POSデータが使用されます。空中三角測量プロセスでは、画像のオーバーラップと対応する画像の特徴に基づいて、画像の相対的な位置と方位を計算します。ドローンの画像POSデータは、3D空間内の各画像の方位を計算するために使用され、この情報は、調査対象エリアを表すスパース点群を生成するために使用されます。
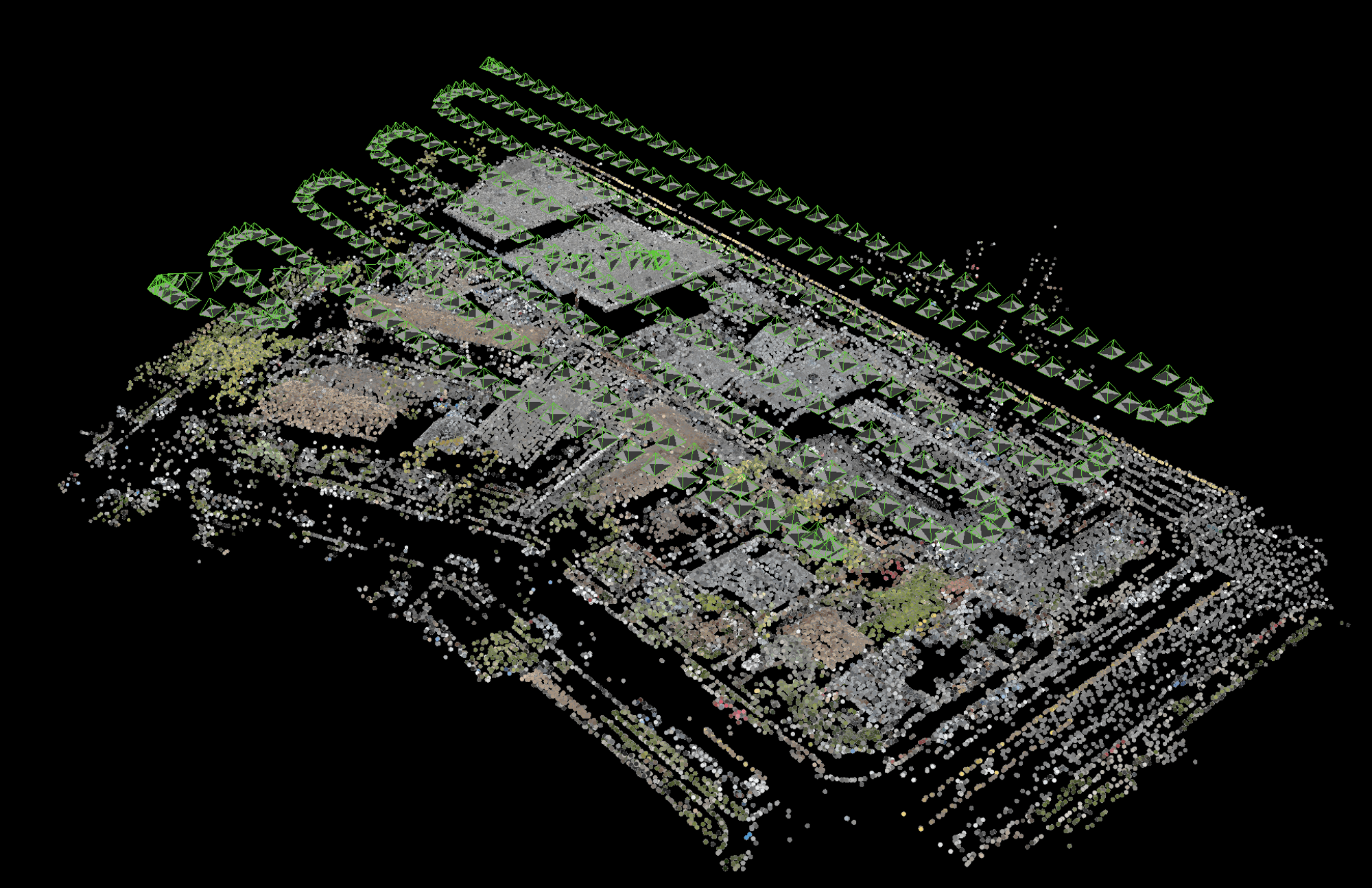 POS画像POSに基づいて生成された空中三角測量モデル
POS画像POSに基づいて生成された空中三角測量モデル
ドローンの画像POSデータが不正確(または不明確)な場合、写真測量プロセスの出力も不正確になります。ドローンの画像POSデータにエラーが発生すると、空中三角測量プロセスでエラーが発生します。これは、バンドル調整プロセスでのエラーを引き起こし、最終的には出力の精度低下につながります。
ドローンの画像POSデータの精度は、PPKプロセス中の出力の全体的な精度に影響します。PPKプロセスでは、GPSドリフトやノイズ、その他のセンサー関連のエラーが発生した場合に、ドローンの画像POSデータが補正されます。そうして得られたPPK補正POSデータは、調査対象エリアを表す高密度点群の生成に使用され、その後3Dモデルまたはマップの作成に使用できます。したがって、写真測量プロセスソフトウェアにおいてドローンの画像POSデータが正しく定義されていることを確認することが重要です。
例として、画像POSデータの適用と上書きにDJI Terraソフトウェアを使用します。下記の手順に従うか動画を見て、TerraソフトウェアでPPK補正画像POSデータを適用して上書きしてください。
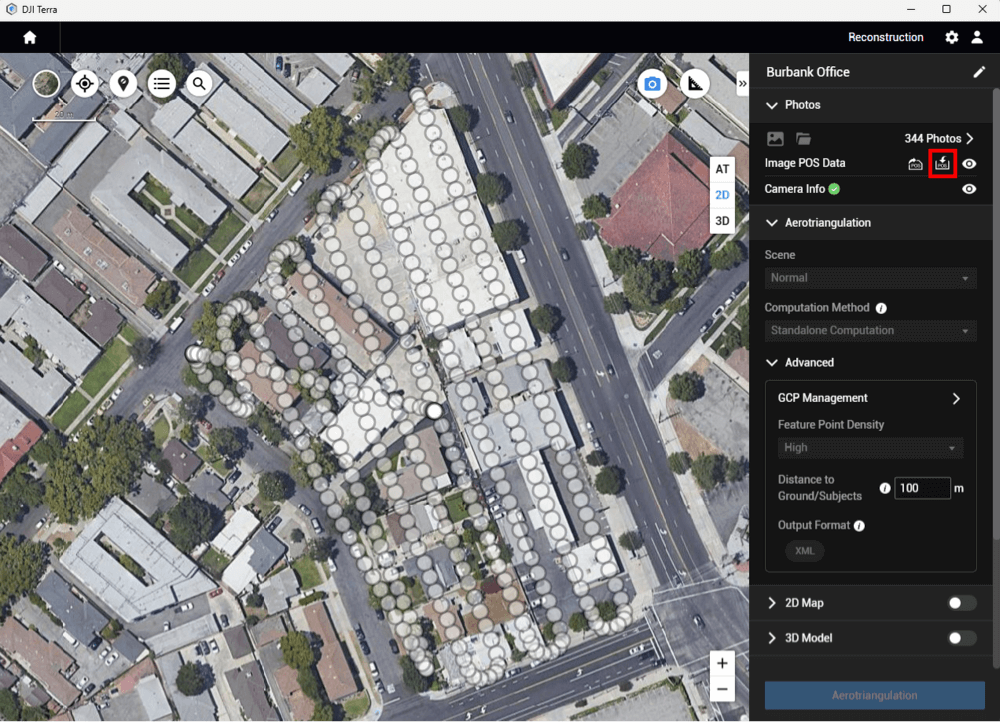
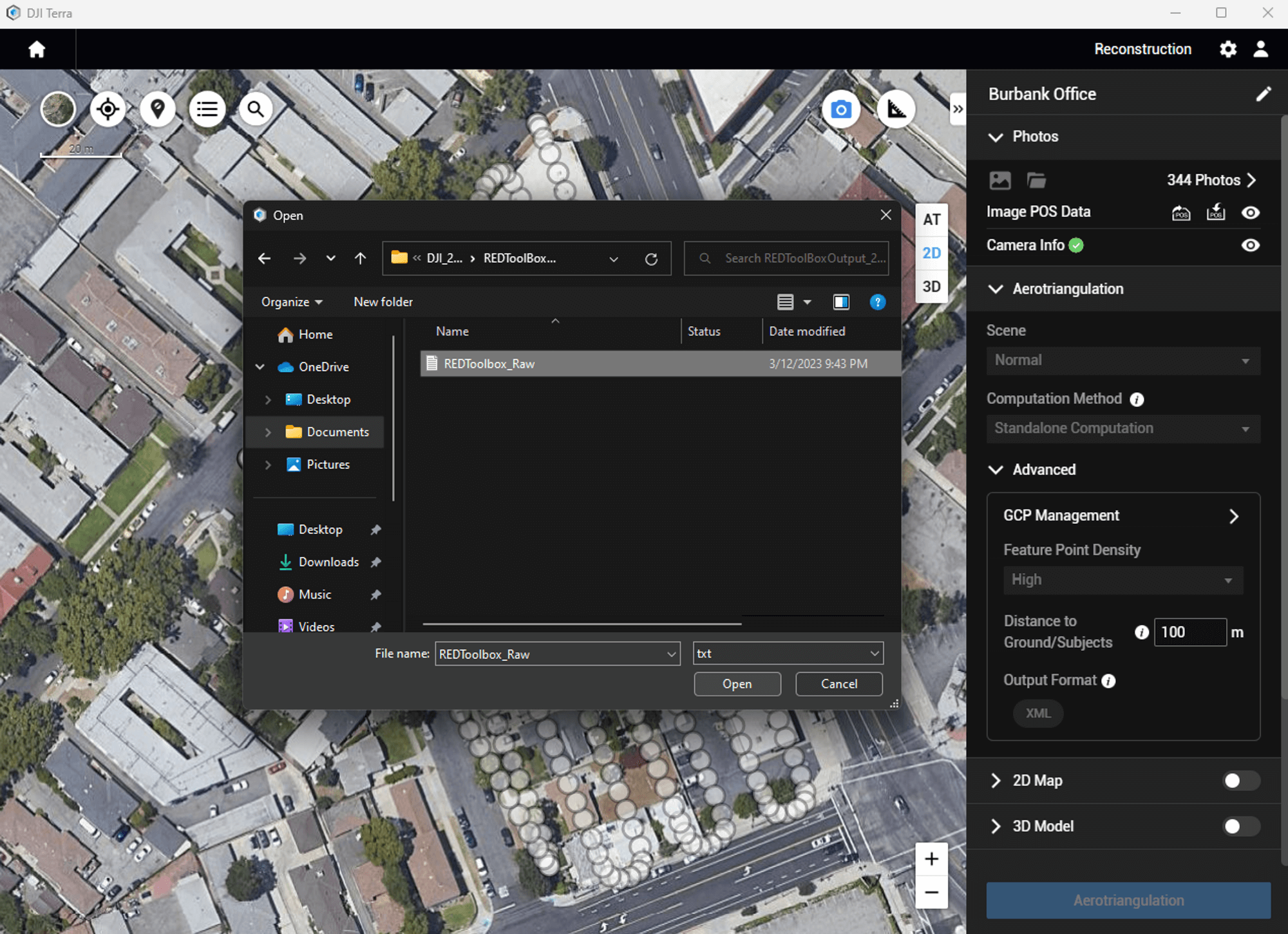
- DJI Terraソフトウェアを開き、[再構築]タブで[新規ミッション]を選択し、[可視光]を選択して新しい写真測量再構築ミッションを作成します。すべての写真をインポートしたら、以下に示すように「POSデータのインポート」アイコンオプションを選択します。
- 最後のセクションから、処理済みPOSファイルをテキスト形式でインポートしてください。
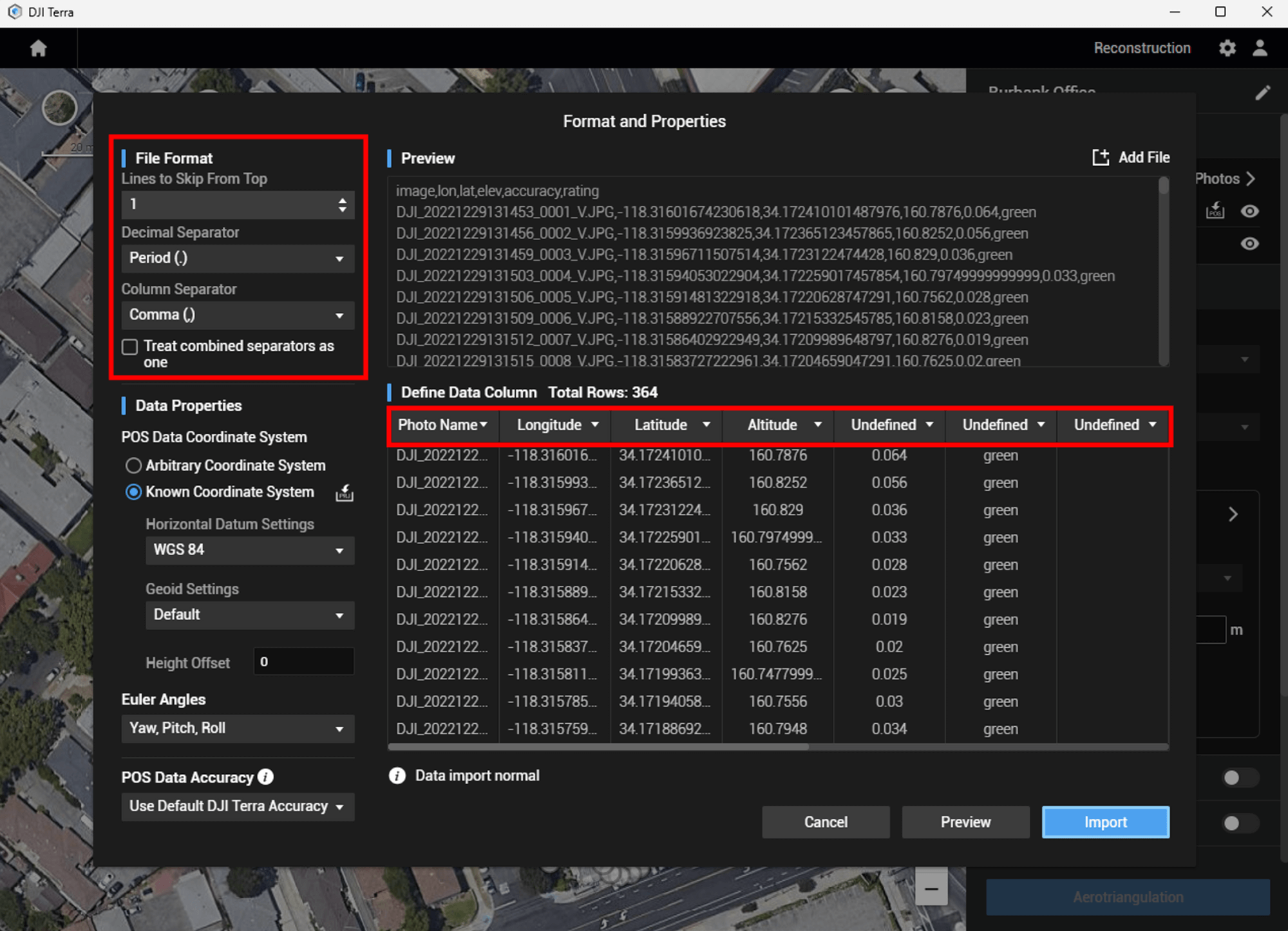
- 画像POSデータをインポートすると、[フォーマットとプロパティ]ウィンドウが自動的に表示されます。このウィンドウで、データ列を調整して[データ列の定義]セクションの列プロパティを定義します。表の最初の行に最初の画像のPOSデータが含まれていることを確認し、[ファイルフォーマット]セクションのツールを使用して、データセパレータとデータの最初の行を定義します。
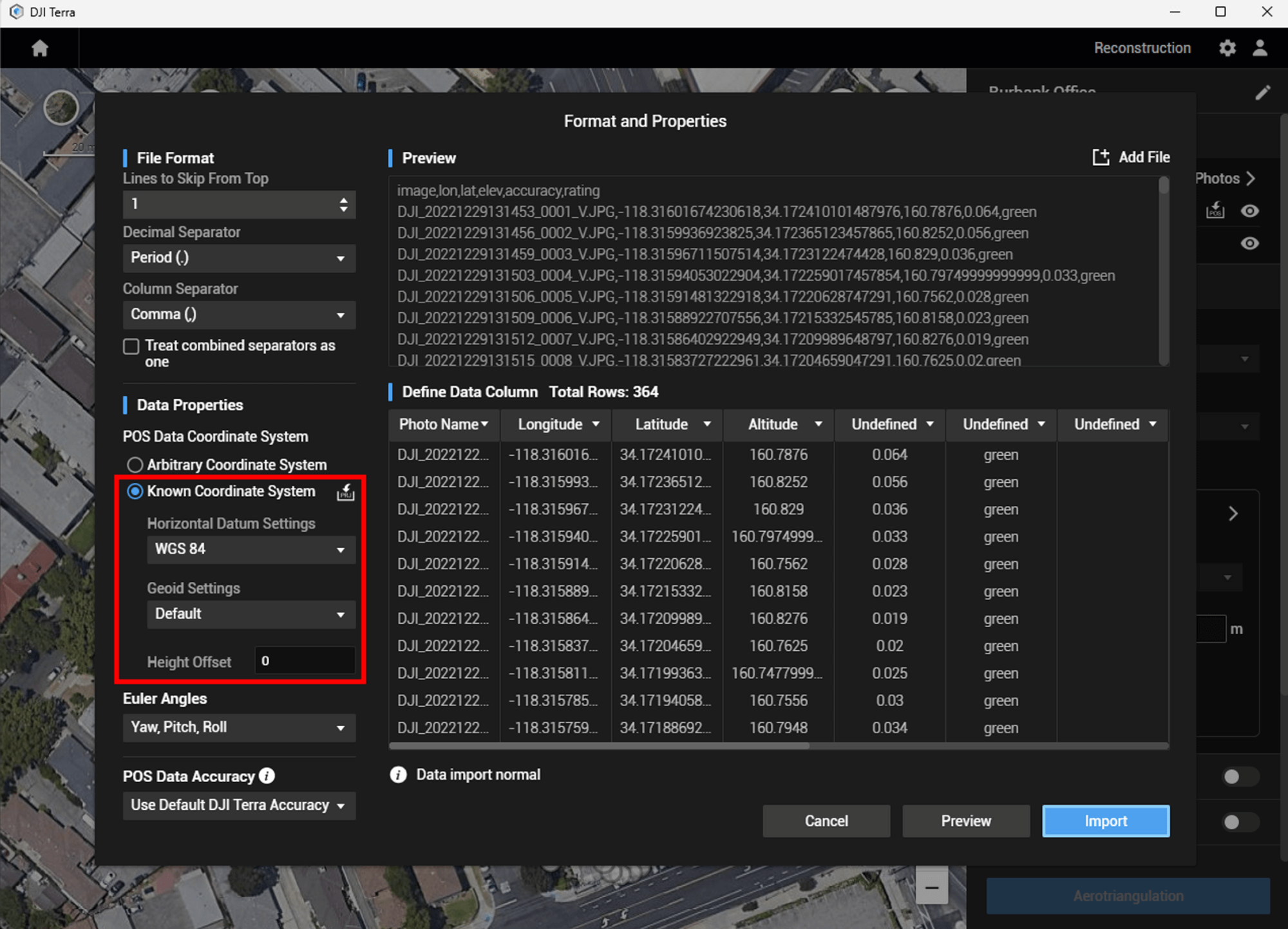
- 続行するには、POSデータ座標系の下にある[既存の座標系]オプションを選択します。次に、インポートしたPPK処理画像POSデータに対応する水平座標と垂直座標を選択します。出力のずれを回避するには、水平系と垂直系の両方に対して正しい座標を選択することが重要です。どの座標系を選択すべきかわからない場合は、PPKソフトウェアの設定またはPPKデータ処理品質レポートから、PPK処理POSデータの座標系を確認できます。通常、水平系は[WGS84](EPSG:4326)に、垂直系は[楕円高さ](単位はメートル、DJI Terraではデフォルトに設定可能)にする必要があります。新しいPOSデータの定義が完了したら、[インポート]を選択します。
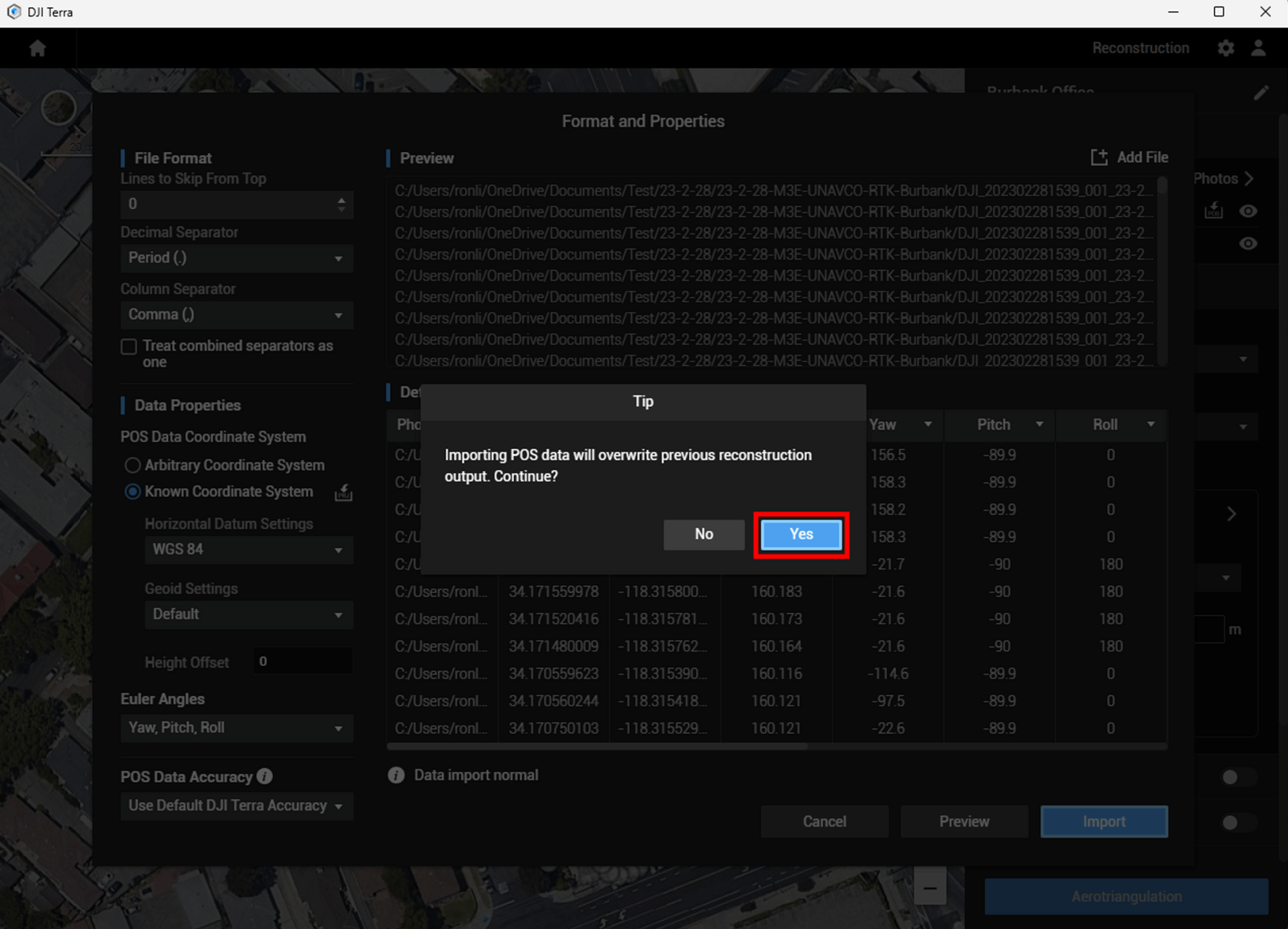
- 写真に埋め込まれた古い画像POSデータをtxtファイルのPPK補正POSデータに置き換えるには、[はい]を選択してDJI Terraでの操作を確定します。これでPOSデータが正常に上書きされました。
LiDAR PPK プロセスの一般的なワークフロー
-
PPK 方式を使用して DJI LiDAR データを処理するには、最初に必ずベースステーション参照ファイルを準備してください。 DJI LiDAR は、次のベースステーションのファイル形式と対応するバージョンをサポートしています。
データフォーマット バージョン メッセージ タイプ ファイル名とファイル拡張子は次のように名前を変更する必要があります。 RINEX V2.1.x / DJI_YYYYMMDDHHMM_XXX.obsRTCM V3.0
V3.2
V3.0: 1003, 1004, 1012, 1014 V3.2: MSM4, MSM5, MSM6, MSM7 DJI_YYYYMMDDHHMM_XXX.rtcm OEM OEM4
OEM6
RANGEDJI_YYYYMMDDHHMM_XXX.oemUBX / RAWX DJI_YYYYMMDDHHMM_XXX.ubx Iベースライン、つまり PPK の記録に使用されるベースステーションとドローンの間の距離は 10km 以内であることが推奨されます。 PPK プロセスに使用されるベース ステーション ファイルには、LiDAR スキャン フライト期間全体が含まれている必要があります。
-
上の表に従って、ベースステーション参照ファイルの名前を変更します。 ベースステーション参照データのファイル名とファイル拡張子の両方の名前を正しく変更することが重要です。 ベースステーション参照ファイルの名前は同一であり、他の LiDAR RAW ファイルと一致する必要があります。 RINEX ファイルの場合は、ファイル拡張子を .YYO から .obs に変更してください。
-
名前を変更したベースステーション参照ファイルが生の LiDAR データ フォルダーと同じディレクトリにあることを確認してください。 次に、生の LiDAR データ フォルダーを DJI Terra にインポートし、プロセスを開始します。 DJI Terra は、ベース ステーション リファレンス ファイルを自動的に読み取り、PPK ベース ステーション リファレンスを使用して PPK プロセスを開始します。
-
ありがとうございました
PPKワークフローを使用すると、さまざまな用途に対応する高精度の地理空間データを取得するための、効率的で正確なソリューションが得られます。PPKでは、GPSと後処理の両方の技術を活用することで、厳しい環境でもセンチメートルレベルのデータ精度を実現できます。正しいPPKワークフローに従って高度なソフトウェアとハードウェアツールを使用することで、最高レベルのデータ精度が得られるため、最終的にはより良い意思決定を行って結果を改善することができます。



