후처리 동적측량(PPK)이란, 글로벌 내비게이션 위성 시스템(GNSS) 데이터를 사용하여 로버/드론의 위치와 궤도을 정확하게 측정하는 방법입니다. PPK는 드론으로부터 원시 GNSS 데이터를 수집하고, 근처 기준국 위치 및 궤도에 대한 정보를 수집한 다음, 데이터를 사후 처리하여 위치 및 궤적 정보의 정확성을 개선합니다.
PPK는 고정밀 위치 지정이 중요한 측량, 매핑 및 정밀 농업과 같은 응용 분야에 일반적으로 사용됩니다. 기준국에 대한 실시간 무선 연결이 필요한 RTK(Real-Time Kinematic) 포지셔닝과 달리, PPK는 사후에 수행될 수 있으므로 데이터 수집의 유연성이 향상됩니다.
GNSS 데이터의 후처리의 경우 특수한 소프트웨어를 사용하여 수신기로 수집한 원시 데이터를 처리하고, 이를 근처 기준국의 데이터와 비교하여 특정 시점에 드론의 정확한 위치를 파악합니다. 이 프로세스는 대기 조건 및 위성 궤도 편차와 같은 요인으로 인해 발생하는 오류를 수정하여 위치 및 궤도 정보의 정확성을 향상시킬 수 있습니다.
RTK 및 PPK 포지셔닝은 모두 무인 항공기 매핑 분야에 사용할 수 있지만, RTK에 비해 PPK를 사용할 경우 몇 가지 이점이 있습니다.
|
장점 |
단점 |
|
|
RTK |
실시간 피드백: RTK를 사용하면 임무 중에 실시간 피드백이 제공되므로 문제가 발생할 때 이를 보다 쉽게 식별하고 해결할 수 있습니다. 신속한 데이터 처리: RTK 데이터를 신속하게 처리할 수 있으므로 최종 제품의 납품 시간이 단축됩니다. 사용자 친화적: RTK는 일반적으로 PPK보다 사용하기 쉽고 설정 및 작동에 필요한 기술의 수가 적습니다. |
낮은 정확도: RTK의 정확도는 통신 지연 및 중단의 영향을 받을 수 있으므로 PPK보다 정확도가 떨어집니다. 통신 종속성: RTK는 임무 중에 기준국과 실시간으로 통신해야 하며, NTRIP 프로토콜을 통해 RTK를 사용할 경우 통신 범위가 제한적이거나 없는 산간벽지에서는 어려움이 있을 수 있습니다. 높은 비용: RTK는 RTK 모듈이 추가로 필요하거나 NTRIP 서비스 가입 요금을 부담해야 하기 때문에 PPK보다 더 비용이 많이 들 수 있습니다. |
|
PPK |
실시간 통신 불필요: RTK의 경우 기준국으로부터 교정 데이터를 수신하기 위해 드론과 지상국 사이의 실시간 통신이 필요합니다. 반면에 PPK는 후처리 중에 수정 데이터가 나중에 적용되므로 실시간 통신이 필요하지 않습니다. 뛰어난 유연성: PPK를 사용하면 드론은 임무를 수행하고 데이터를 수집할 수 있으며, 나중에 후처리를 수행할 수 있으므로, 특히 통신 범위가 제한적이거나 없는 지역에서 더욱 유연하게 데이터를 수집할 수 있습니다. 높은 정확도: RTK와 PPK는 모두 정확도가 높지만, PPK는 데이터 수집 중 잠재적인 통신 지연 또는 중단의 영향을 받지 않으므로 정확도가 더 높을 수 있습니다. 또한 PPK는 후처리 중에 더 많은 기준국을 이용할 수 있으므로 정확도를 더욱 향상시킬 수 있습니다. 비용 절감: PPK에는 실시간 통신이 필요하지 않으므로 장비 및 가입 비용이 추가로 들 수 있는 RTK보다 저렴할 수 있습니다. |
더 긴 후처리 시간: PPK에는 데이터 후처리가 필요하므로 시간이 더 걸리고 최종 제품의 납품이 지연될 수 있습니다. 더 높은 기술 요구 사항: PPK의 경우 데이터 후처리로 인해 더 높은 수준의 기술이 필요하며, 그 결과 일부 사용자는 사용하지 못할 수도 있습니다. 최소 비행 시간 요구 사항: 정확한 위치 데이터를 얻으려면 비행 중 충분한 GNSS 데이터 포인트를 캡처해야 합니다. 즉, 드론이 PPK 처리에 충분한 데이터 포인트를 캡처하기 위해 일정 기간과 거리 이상을 비행해야 합니다. 요구되는 정확한 기간 및 거리는 사용된 GNSS 수신기, 기준국 데이터의 품질 및 비행 환경과 같은 요인에 따라 달라집니다. 일반적으로 정확한 PPK 처리를 위해 충분한 GNSS 데이터 포인트를 캡처하려면 최소 10분 이상의 비행 시간이 권장됩니다. 그러나 이는 매핑 프로젝트의 구체적인 요구 사항과 수집된 GNSS 데이터의 품질에 따라 달라질 수 있습니다. |
매핑 프로젝트에 대한 PPK 또는 RTK의 선택은 궁극적으로 유연성, 비용 및 임무 규모 등 구체적인 요구 사항에 따라 달라집니다. 두 방법 모두 장점과 단점이 있지만 DJI Enterprise RTK 드론은 언제나 위성 관측 데이터를 기록합니다. 그 결과, 불안정한 셀룰러 환경으로 인해 RTK 비행 중에 실시간 통신이 방해받더라도, 사용자는 여전히 기지국 데이터를 검색하고 센티미터 수준의 정확한 데이터를 출력하기 위한 백업으로 PPK 방식을 사용할 수 있습니다.
PPK 하드웨어 및 소프트웨어 준비
|
UAV 및 페이로드 하드웨어(제공되는 옵션 중 하나) |
매트리스 300 RTK + Zenmuse P1 |
|
비행 임무 계획 소프트웨어 |
DJI Pilot 2 앱 |
|
RINEX(Base Receiver Independent Exchange) 파일 및 탐색 파일의 소스 |
DJI D-RTK 2 기지국 |
| 전문 PPK 소프트웨어(제공되는 옵션 중 하나) |
Propeller Aero |
| 사진 측량 소프트웨어 |
DJI Terra |
일반 워크플로
드론 이미지 데이터로 PPK 프로세스를 수행하는 것은 어려워 보일 수 있지만 실제로는 신중한 계획과 실행이 필요한 간단한 프로세스입니다. 이 프로세스는 몇 가지 주요 단계로 이루어져 있으며, 이에 관해서는 아래 지침에서 보다 자세히 살펴보겠습니다.
- 설정 및 준비: 드론 데이터 수집을 시작하기 전에 임무를 신중하게 계획해야 합니다. 이를 위해 비행 시간은 충분히 길어야 하고, DJI Pilot 앱에서 몇 가지 설정이 활성화되어 있어야 합니다. 임무를 신중하게 계획하면 정확한 PPK 처리에 충분한 데이터를 수집할 수 있습니다.
- 드론 데이터 수집: 임무를 계획했으면 비행 중 드론 수신기로부터 드론 이미지 데이터와 해당 GNSS 데이터를 수집할 차례입니다. GNSS 데이터에는 원시 위성 내비게이션 시스템 데이터와 타임스탬프 정보가 포함되어야 합니다. 정확한 PPK 처리를 위해 가능한 한 많은 데이터를 수집하는 것이 중요합니다.
- 참조 데이터 수집: 드론 데이터를 수집하는 것 외에도 CORS 또는 기타 지상 수신기와 같은 근처의 GNSS 기준국에서 참조 데이터를 수집해야 합니다. 참조 데이터에는 드론 GNSS 데이터와 동일한 GNSS 신호 및 타이밍 정보가 포함되어야 합니다. 참조 데이터를 수집하면 PPK 결과의 정확도를 최대한으로 보장할 수 있습니다.
- 데이터 정렬 및 PPK 처리: 필요한 데이터를 모두 수집했으면 드론 이미지 데이터를 타이밍 정보에 기반해 해당 GNSS 데이터와 정렬해야 합니다. 이 작업은 이미지 캡처와 GNSS 데이터 포인트 간의 타이밍 정보를 일치시킬 수 있는 특수한 소프트웨어 도구로 수행할 수 있습니다. 데이터를 정렬한 후에는 특수 PPK 소프트웨어 또는 온라인 서비스를 사용하여 데이터를 처리하면 됩니다. PPK 처리 시에는 드론 수신기와 기준 스테이션의 GNSS 데이터를 사용하여 비행 중 캡처된 각 이미지의 정확한 위치 정보를 계산합니다.
- POS 데이터 덮어쓰기: 새 POS 데이터를 사진 측량 소프트웨어로 올바르게 가져왔는지 확인합니다. 사진 측량 모델의 정확도는 입력 데이터의 품질에 따라 크게 달라지기 때문에 이 단계는 매우 중요합니다. 따라서 POS 데이터와 소프트웨어의 호환성을 다시 확인하고 제대로 덮어써졌는지 확인해야 합니다.
드론 이미지 데이터로 PPK 프로세스를 수행하는 것이 복잡해 보일 수는 있지만 정확한 매핑 결과를 얻기 위해 필요한 프로세스입니다. 임무를 신중하게 계획하고, 충분한 데이터를 수집하고, 품질 관리 점검을 수행하면 가능한 한 정확한 결과를 얻을 수 있습니다.
설정 및 준비
드론을 비행하기 전에 DJI Pilot 2 앱을 적절하게 구성하는 것이 중요합니다. 다음은 성공적인 비행을 위한 몇 가지 팁입니다.
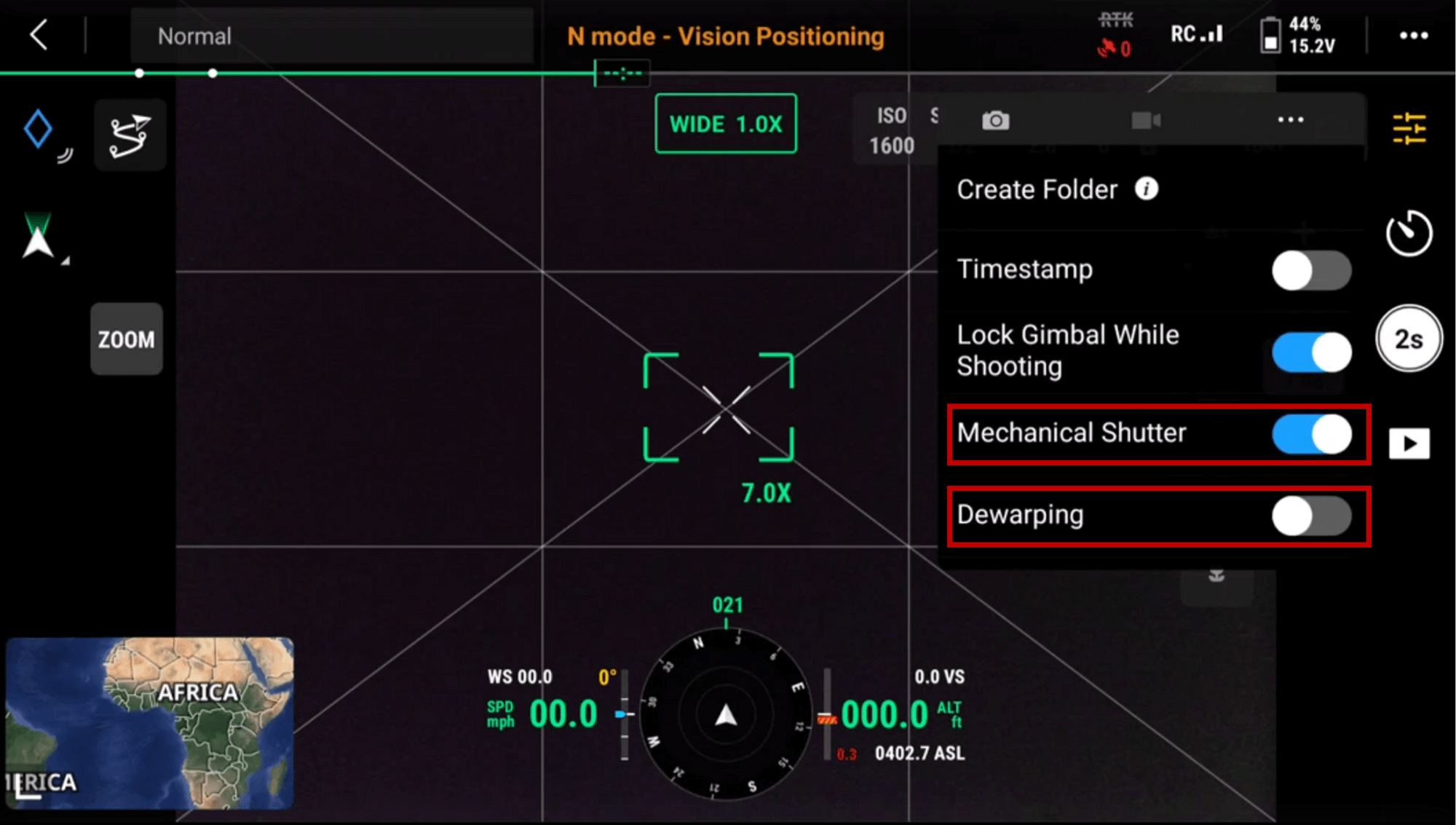
- "기계식 셔터" 옵션을 활성화하고 "디워핑" 옵션을 비활성화합니다.
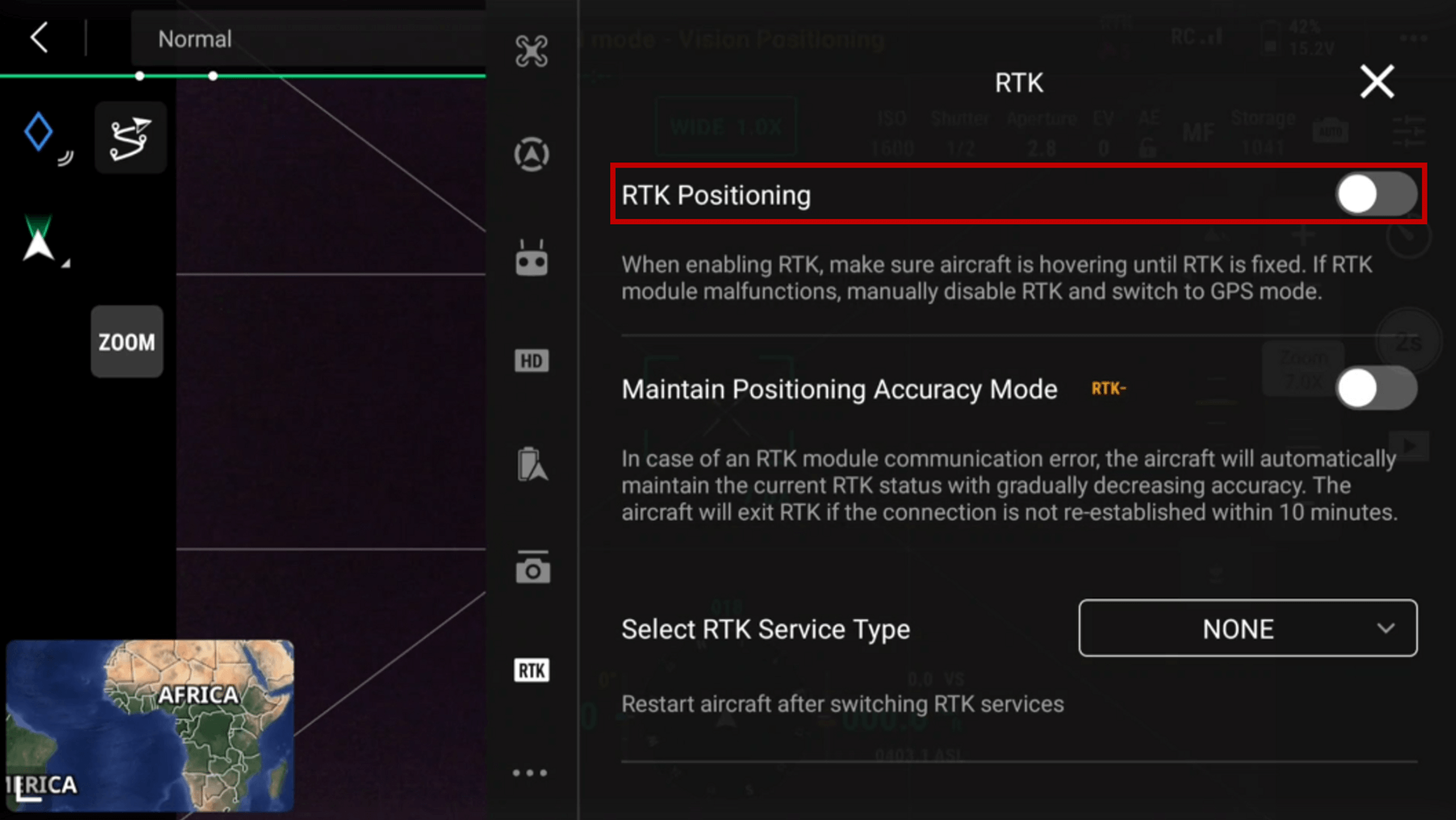
- Pilot 앱 설정에서 RTK 옵션이 비활성화로 설정되어 있는지 확인합니다.
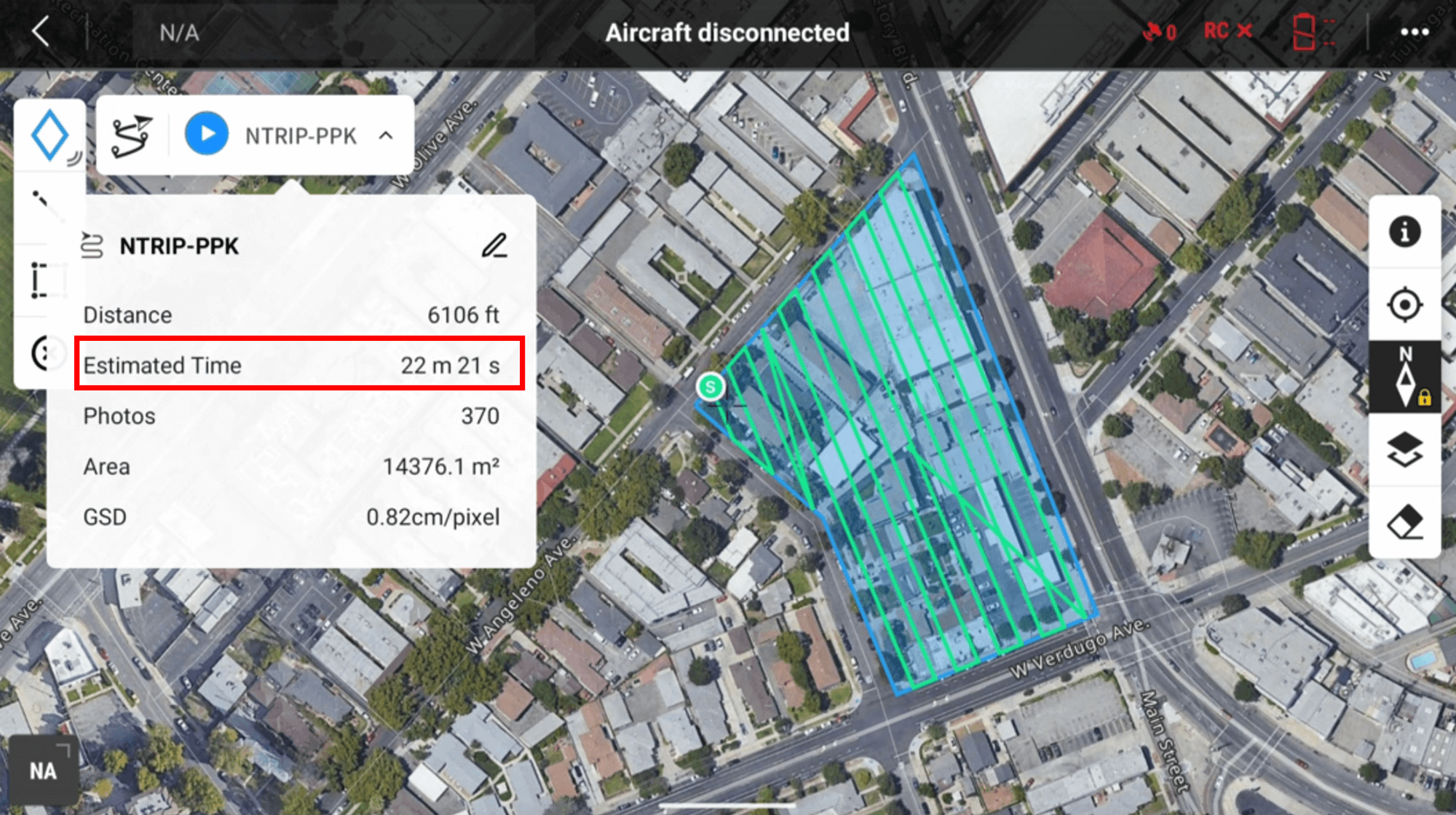
- PPK에는 데이터 후처리가 필요하므로 시간이 더 걸리고 최종 제품의 납품이 지연될 수 있다는 점에 주의하십시오. 또한 PPK로 정확한 위치 데이터를 얻으려면 비행 중 충분한 GNSS 데이터 포인트를 캡처해야 합니다. 요구되는 정확한 기간 및 거리는 사용된 GNSS 수신기, 기준국 데이터의 품질 및 비행 환경과 같은 요인에 따라 달라집니다. 일반적으로 정확한 PPK 처리를 위해 충분한 GNSS 데이터 포인트를 캡처하려면 최소 10분 동안 비행하는 것이 좋습니다. Pilot 앱의 임무 개요 드롭다운 탭에서 예상 임무 비행 시간을 확인할 수 있습니다.
드론 데이터 수집
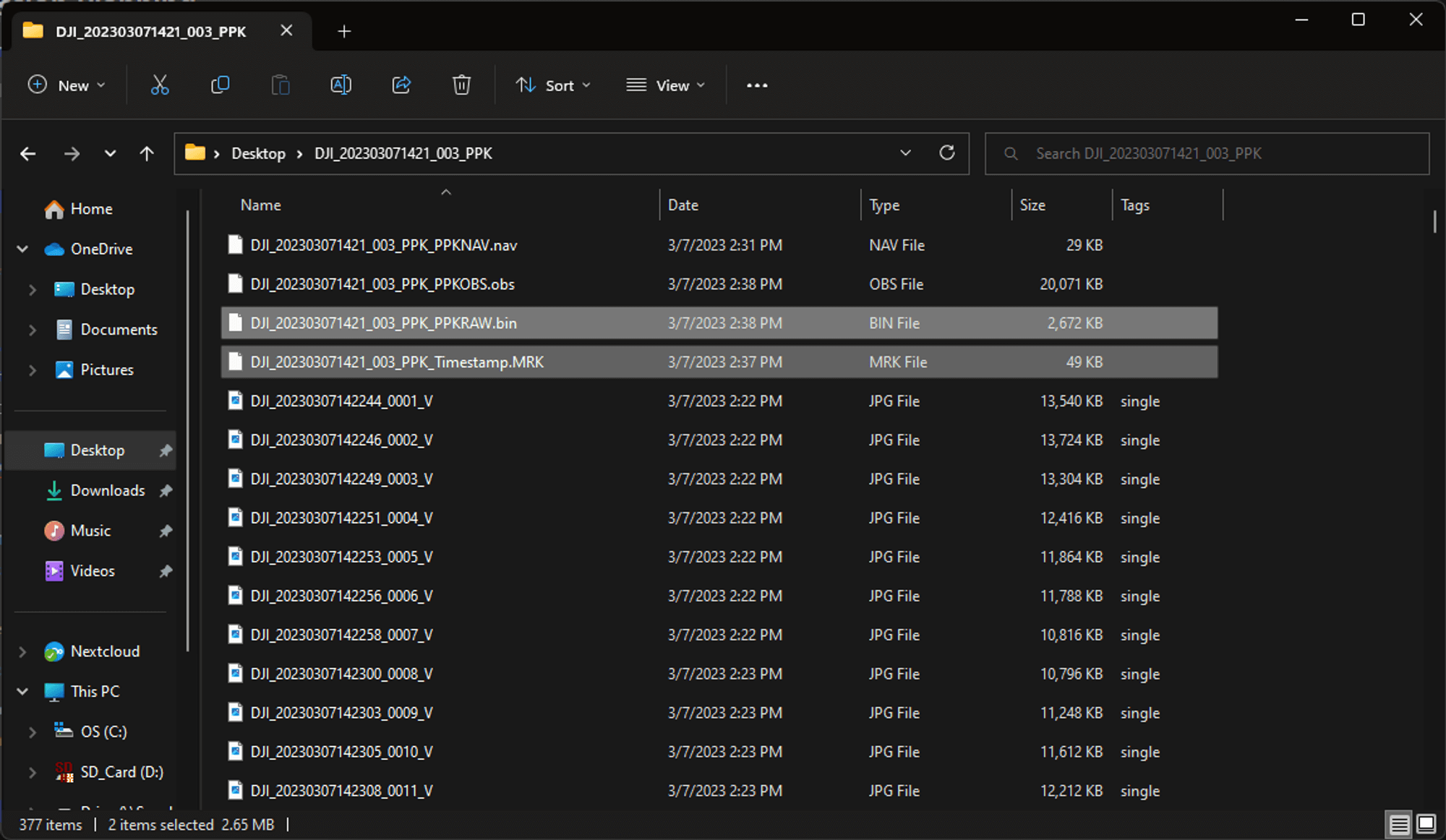
PPK 방식으로 적절하게 처리하려면 드론 데이터가 필수적입니다. 원본 이미지 외에도 이미지 폴더에는 드론 RINEX(Receiver Independent Exchange) 파일과 이미지 타임스탬프 파일 두 개의 추가 파일이 필요합니다.
드론 RINEX 파일에는 정확도가 높은 포지셔닝을 달성하는 데 중요한 원시 GPS 측정치가 포함되어 있습니다. 이 데이터는 대기 조건 및 GPS 위성의 위치와 같은 다양한 요인으로 인해 발생할 수 있는 GPS 신호의 오류를 수정하는 데 사용됩니다. 이 데이터가 없으면 PPK 방식의 정확도가 크게 떨어집니다. "XXX_PPKRAW.BIN"이라는 RINEX 파일은 원본 사진 폴더에서 찾을 수 있습니다.
마찬가지로 이미지 타임스탬프 파일도 정확한 결과를 위해 매우 중요합니다. 이 파일은 각 이미지를 촬영한 정확한 시간을 기록하며, 이는 이미지 데이터를 GPS 측정값과 적절히 동기화하는 데 필요합니다. 이 정보가 없으면 이미지 데이터를 GPS 데이터와 정확하게 정렬하는 것이 매우 어려워지고, 이는 최종 결과의 정확성에 부정적인 영향을 미칠 것입니다. "XXX_Timestamp.mrk"라는 타임스탬프 파일도 원본 사진 폴더에서 찾을 수 있습니다.
PPK 방식으로 가능한 최고의 정확도를 달성하려면 이러한 파일이 적절하게 수집되고 처리되는지 확인하는 것이 중요합니다. RTK/PPK 지원 DJI Enterprise 드론 모델은 다음과 같은 파일을 출력할 수 있습니다.
DJI M300 RTK ( Zenmuse P1 또는 Zenmuse L1 페이로드만 해당)DJI 매빅 3 Enterprise (RTK 모듈이 연결된 경우에만 해당)
DJI 매빅 3 Multispectral (RTK 모듈이 연결된 경우에만 해당
DJI 팬텀 4 RTK
참조 데이터 수집
참조 데이터에 대한 기지국을 사용하여 PPK(후처리 동적측량) 처리를 수행하려면 일반적으로 GNSS(Global Navigation Satellite System) 데이터와 관련해 베이스 RINEX 파일과 탐색 파일, 두 가지 유형의 파일이 필요합니다.
- 베이스 RINEX 파일: 이 파일에는 기지국에서 수집한 원시 GNSS 데이터가 들어 있으며, 이 데이터는 일반적으로 RINEX 형식으로 되어 있습니다. 베이스 RINEX 파일에는 위성 신호, 위치 및 타이밍 정보의 정밀한 측정치가 포함되어 있습니다. 파일은 일반적으로 드론 비행과 동시에 또는 가능한 한 비행 시간에 가깝게 수집됩니다. 베이스 RINEX 파일은 비행 중 드론에 의해 수집된 원시 GNSS 데이터를 수정할 때 참조로 사용됩니다.
- 탐색 파일: 이 파일에는 매핑 프로젝트에 사용되는 GNSS 위성의 위치와 궤도에 대한 정보가 들어 있습니다. 탐색 파일은 PPK 소프트웨어에서 드론 비행 중에 캡처된 각 이미지에 대한 정확한 위치 정보를 계산하는 데 사용됩니다. 탐색 파일은 미국 NGS(National Geodetic Survey)와 같은 정부 기관이나 IGS(International GNSS Service)와 같은 온라인 서비스를 포함한 다양한 출처에서 얻을 수 있습니다.
이 지침 섹션에서는 NGS CORS를 사용하여 이러한 GNSS 파일을 예시로 포함합니다.
NOAA(National Oceanic and Atmospheric Administration) UFCORS(User Friendly CORS) 서비스를 사용하여 CORS 참조 데이터를 수집하려면 다음 단계를 따르십시오.
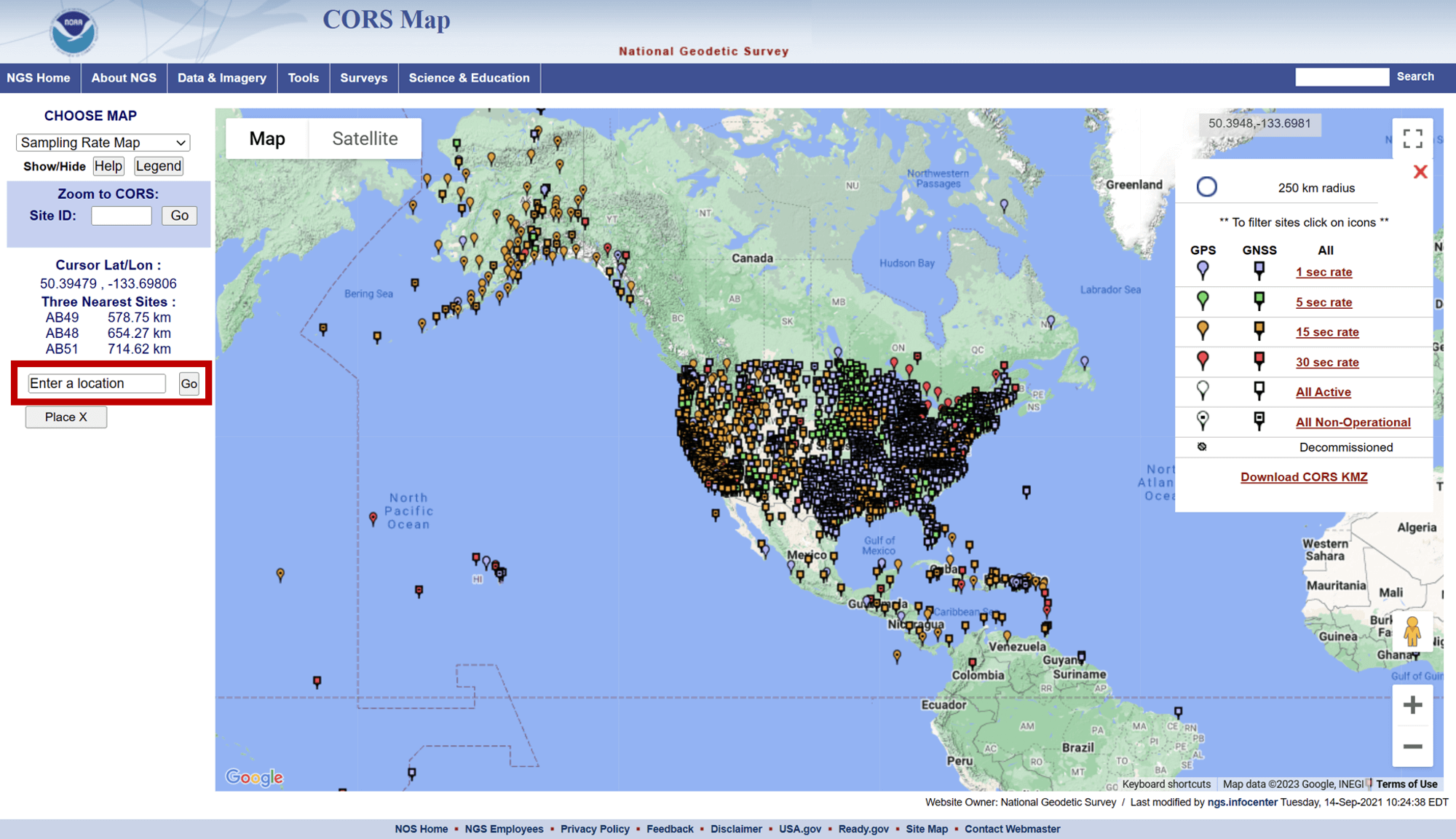
- NCN 웹 사이트로 이동하여 웹 페이지에서 NCN Map을 선택합니다.
- 왼쪽의 검색 상자에 드론 비행 주소를 입력하고 이동을 선택합니다.
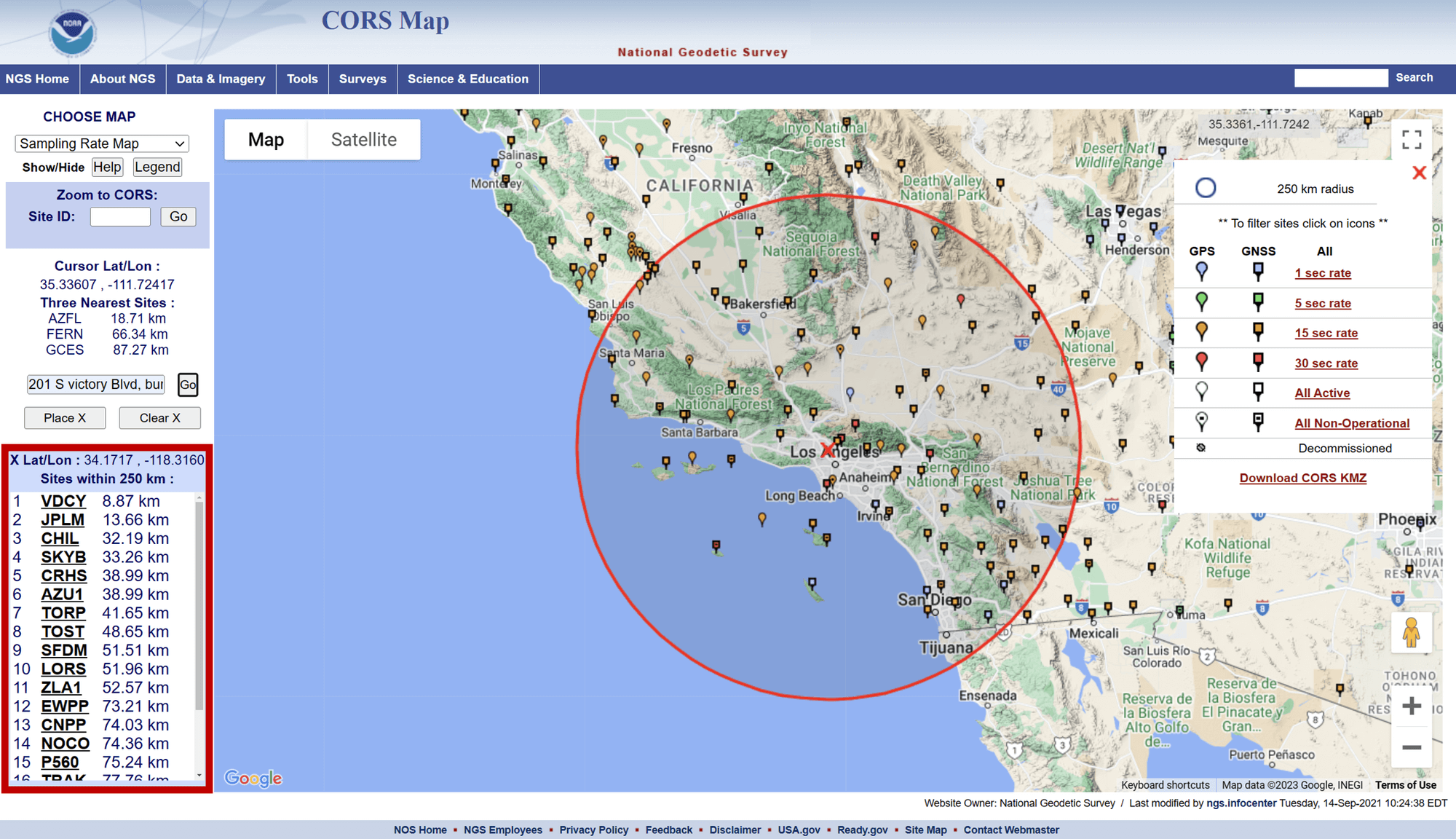
- 기준선(기준선은 GNSS 기지국과 드론 사이의 거리를 말합니다. 기준선 거리가 짧을수록 대기 조건 및 기타 환경 요인에 의해 발생할 수 있는 오류 가능성이 줄어들기 때문에 일반적으로 PPK 결과의 정확도가 높아질 수 있습니다.)이 최대한 짧은 사이트를 선택하고 사이트 이름을 기록해 둡니다. CORS 사이트와 드론 사이의 기준선 거리는 PPK 프로세스에 사용되는 참조 데이터의 품질에 영향을 줄 수 있습니다. 기준선 거리가 길면 대기 및 기타 환경적 요인으로 인해 오류가 더 많이 발생하여 PPK 결과의 정확도가
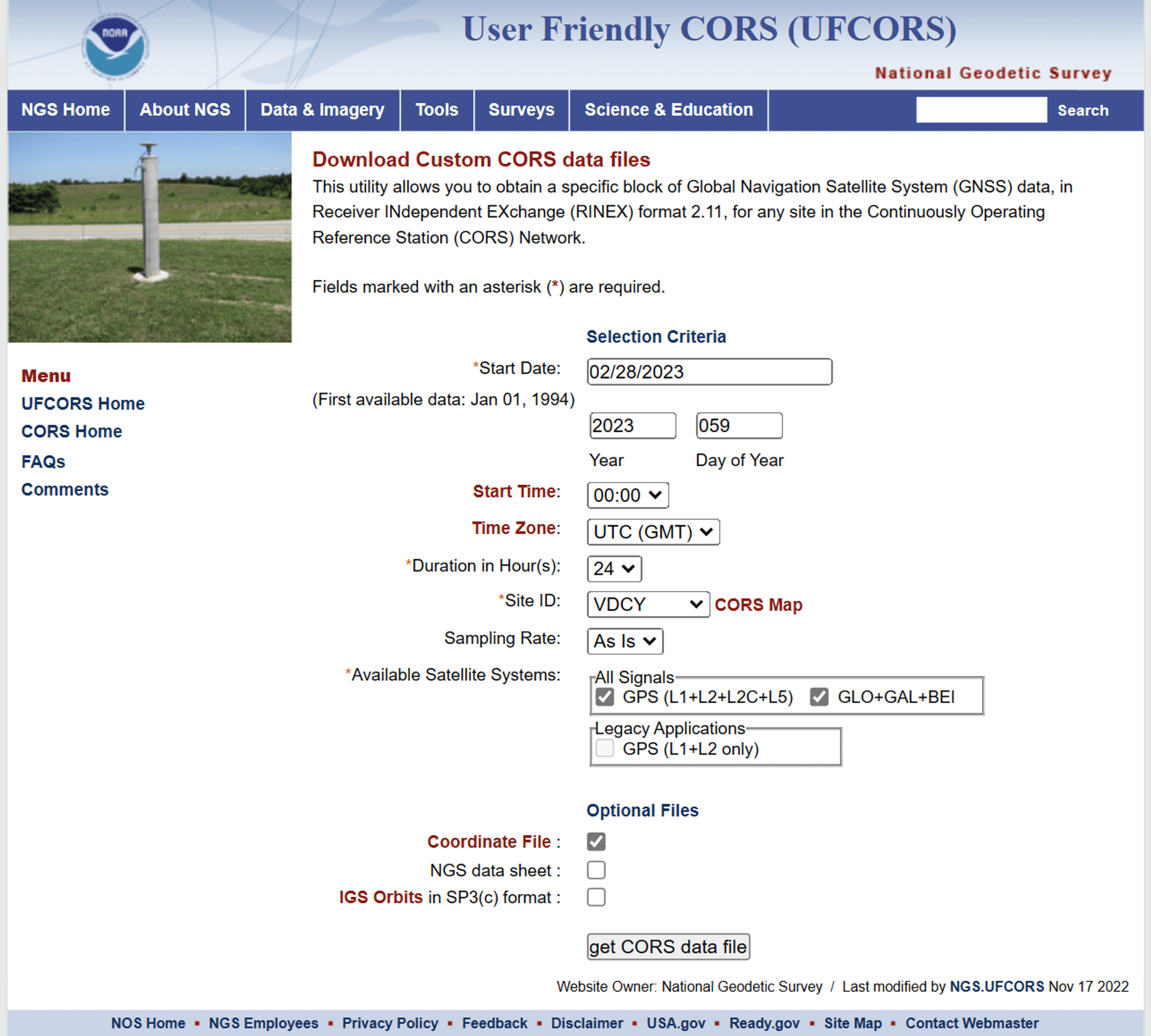
- UFCORS 웹사이트로 이동하여 검색할 데이터의 날짜 범위를 선택합니다. "CORS 데이터 파일 가져오기"를 선택하면 데이터가 압축 파일(예: .zip)로 다운로드됩니다. 정확한 PPK 처리를 위해서는 CORS 데이터를 드론 이미지 데이터와 동시에 수집하는 것이 중요합니다. 또한 CORS 데이터의 품질을 신중하게 평가하여 매핑 프로젝트에 필요한 정확도 표준을 충족하는지도 확인해야 합니다. 정확한 PPK 처리와 고품질 매핑 결과를 위해서는 드론 임무와 CORS 데이터 수집의 적절한 계획 및 실행이 필수적입니다.
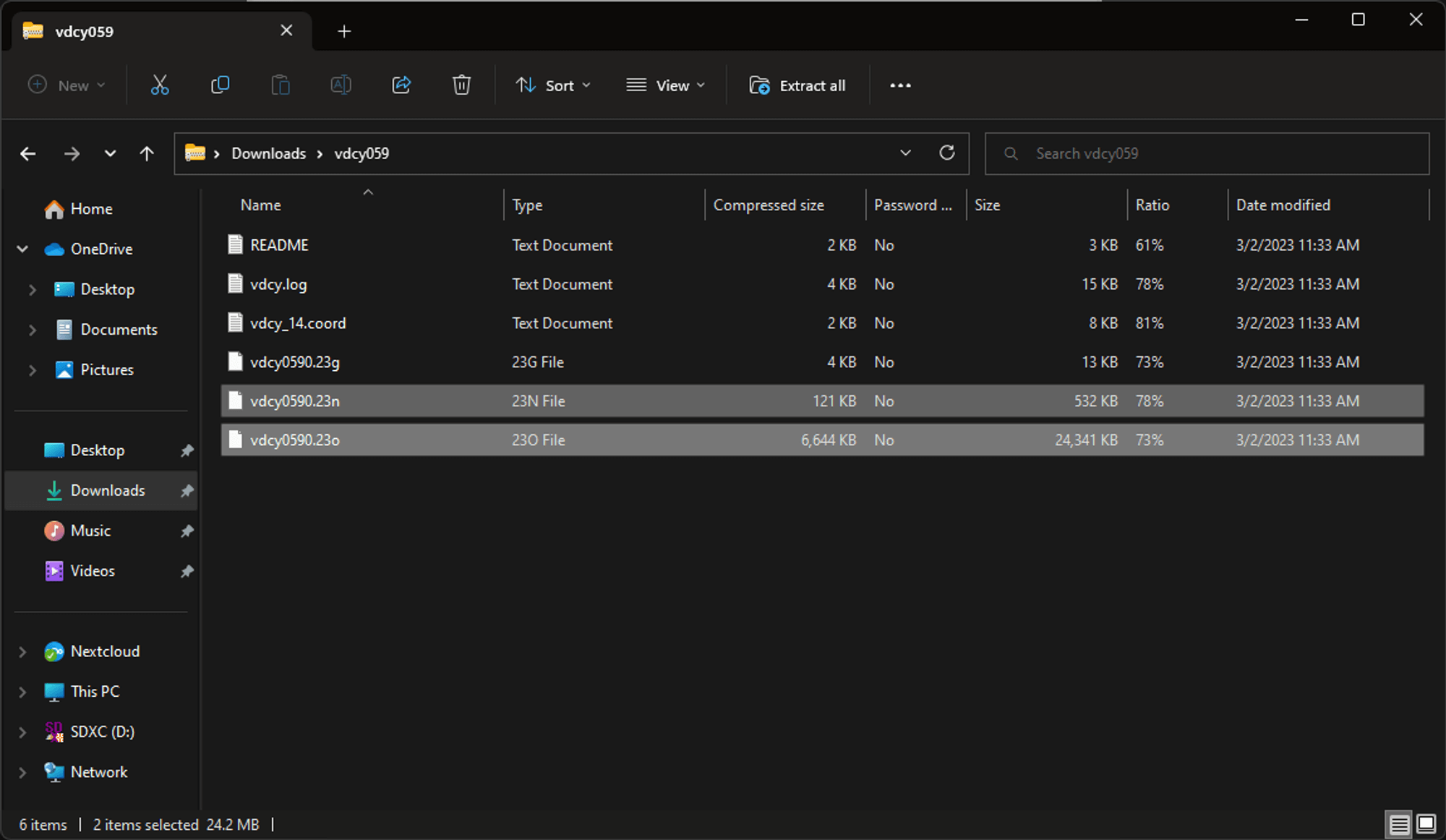
- 다운로드한 zip 파일을 열고 zip 파일에 xxx.xxo(베이스 RINEX 파일)와 xxx.xxn(탐색 파일)의 두 파일이 포함되어 있는지 확인합니다.
드론 운용 현장 근처에 NGS CORS 기지국이 없는 경우, DJI D-RTK 2 이동국은 PPK 처리를 위한 기지국 데이터를 얻기에 적합한 옵션입니다. 이를 사용하려면 WGS84 좌표와 타원형 높이(m)의 알려진 지점 위에 기지국을 설치하기만 하면 됩니다. 그런 다음 Pilot 2 앱에서 알려진 지점 3D 좌표를 기준으로 기지국 위치를 오프셋합니다.
먼저 현장에서 D-RTK 2를 설정하고 전체 비행 시간을 커버할 수 있도록 비행 전후에 몇 분 정도 기다립니다. 또한 방향 변경으로 인해 데이터 기록이 중단될 수 있으므로 드론 비행 중에는 D-RTK 2 기지국을 이동하거나 기울이지 마십시오. 비행이 완료되면 USB-C 케이블을 통해 기지국을 컴퓨터에 연결하고 비행 후 기록된 .dat 형식 RTCM(Radio Technical Commission for Maritime) 파일을 내보냅니다. DJI D-RTK 2 이동국을 사용하면 실시간 통신에 필요한 추가 장비 및 가입비를 부담하지 않아도 됩니다. 따라서 PPK 프로세스의 비용 효율성이 높아지며 특히 셀룰러 통신 범위가 제한적이거나 없는 지역에서 데이터 수집의 유연성이 향상됩니다.
데이터 정렬 및 PPK 처리
이 섹션에서는 NGS CORS, 타사 기지국 또는 DJI D-RTK 2 이동국에서 수집한 GNSS Rover 파일에 드론 데이터를 적용하여 PPK 프로세스를 시작하는 프로세스를 단계별로 안내합니다. 예시로 RedCatch REDToolBox를 사용합니다.
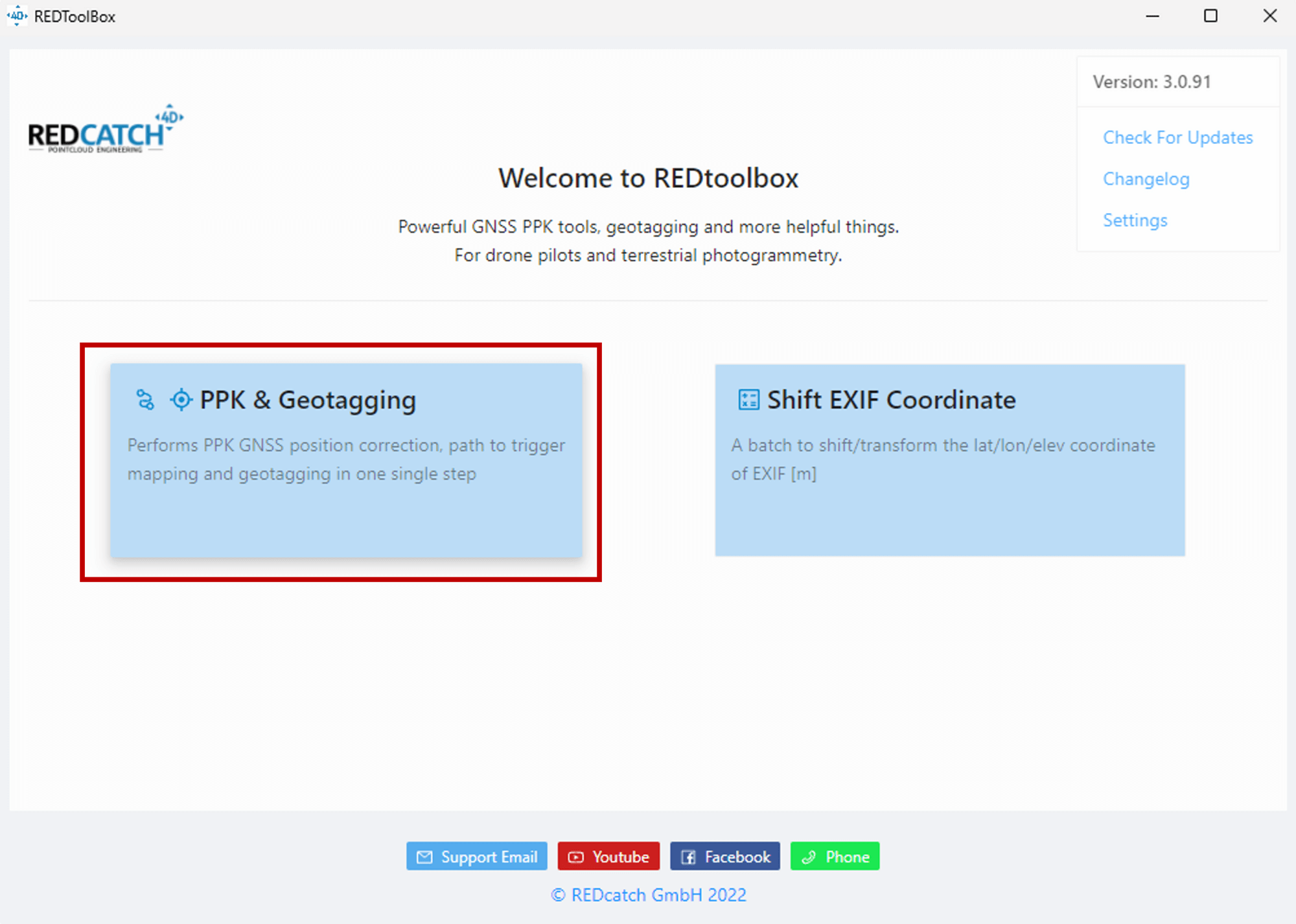
- 시작하려면 RedCatch REDToolBox를 열고 "PPK 및 지오태깅" 옵션을 선택해야 합니다.
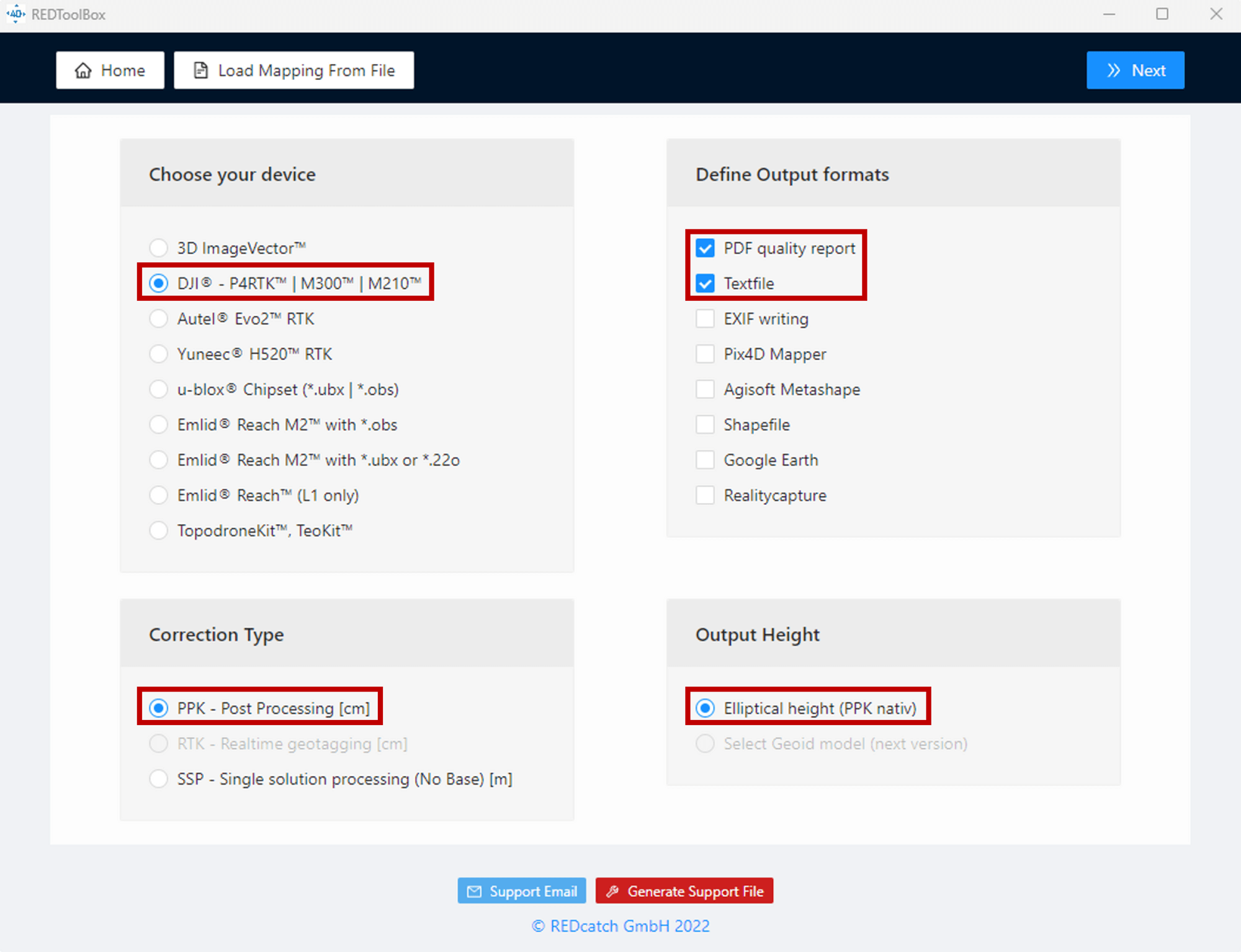
- 이 옵션에서는 장치 옵션으로 DJI를 선택하고 출력 형식으로 PDF 품질 보고서 및 textfile을 선택하라는 메시지가 표시됩니다. 그런 다음 PPK 옵션을 보정 유형으로 선택하고 타원형 높이(PPK 고유)를 출력 높이로 선택합니다. 이 항목을 선택한 후 "다음"을 클릭합니다.
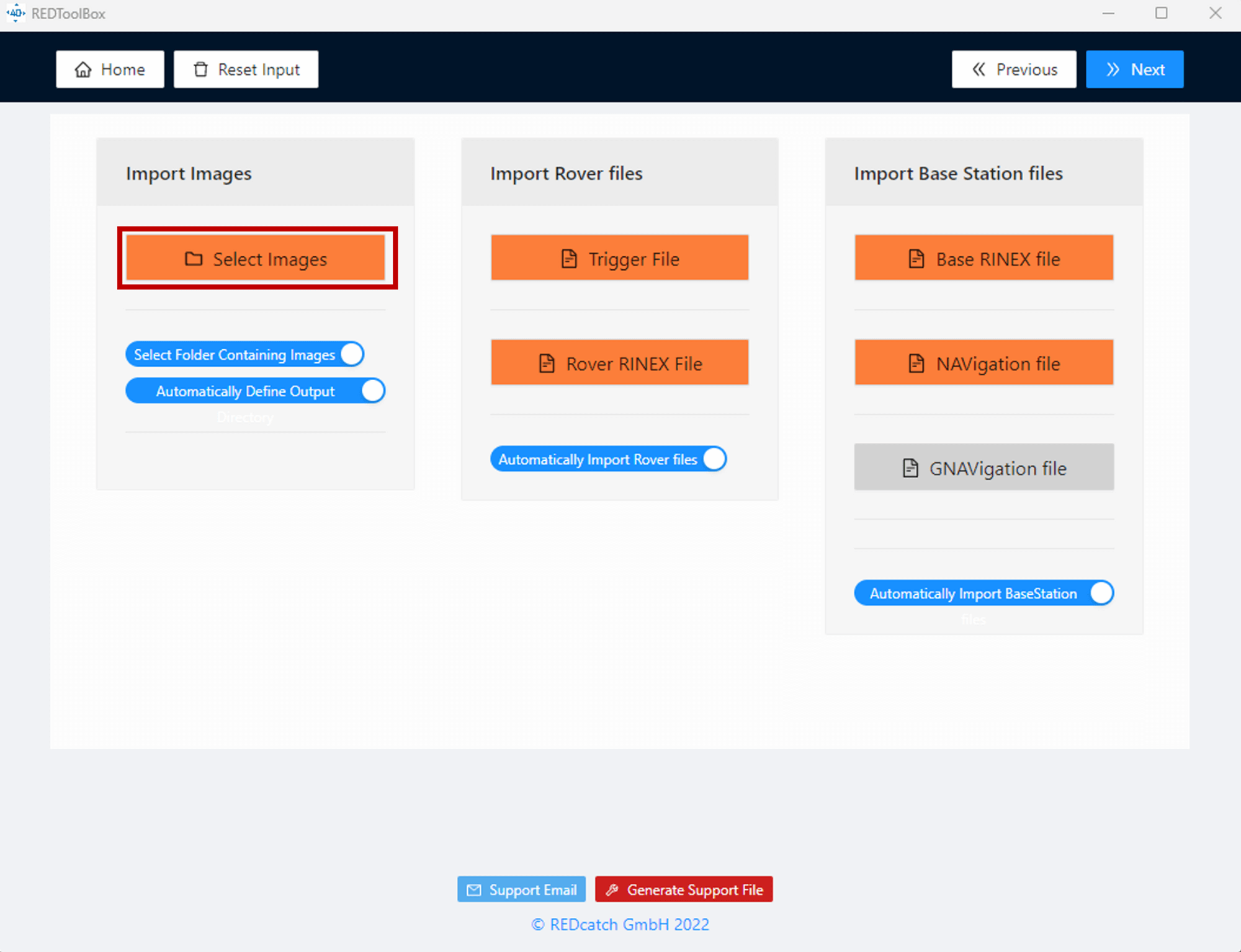
- 이미지를 가져오려면 "이미지 가져오기" 섹션으로 이동한 다음 "이미지 선택"을 선택하여 원본 이미지의 디렉토리를 정의합니다. 이렇게 하면 이미지를 제대로 가져와서 PPK 프로세스에서 사용할 수 있습니다.
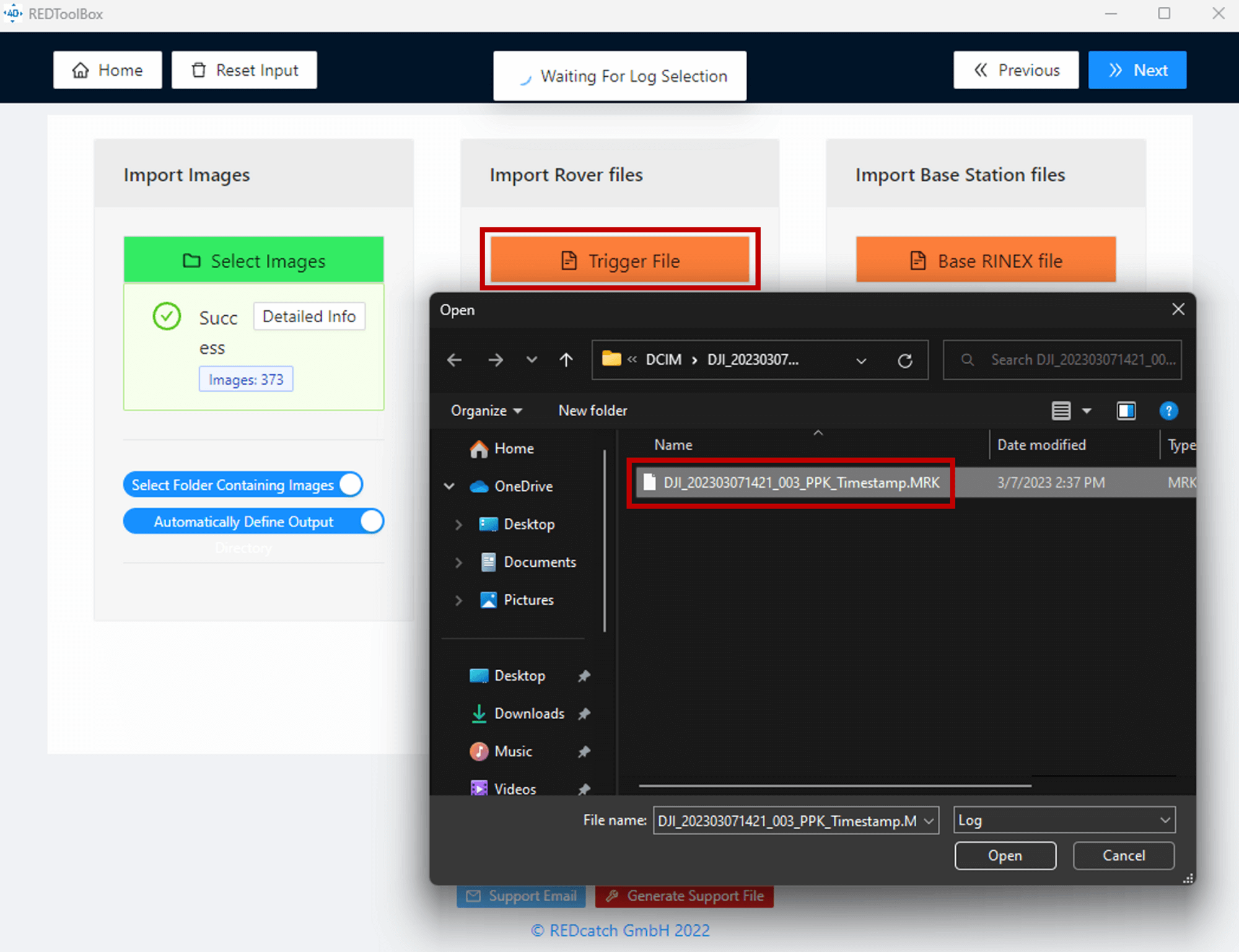
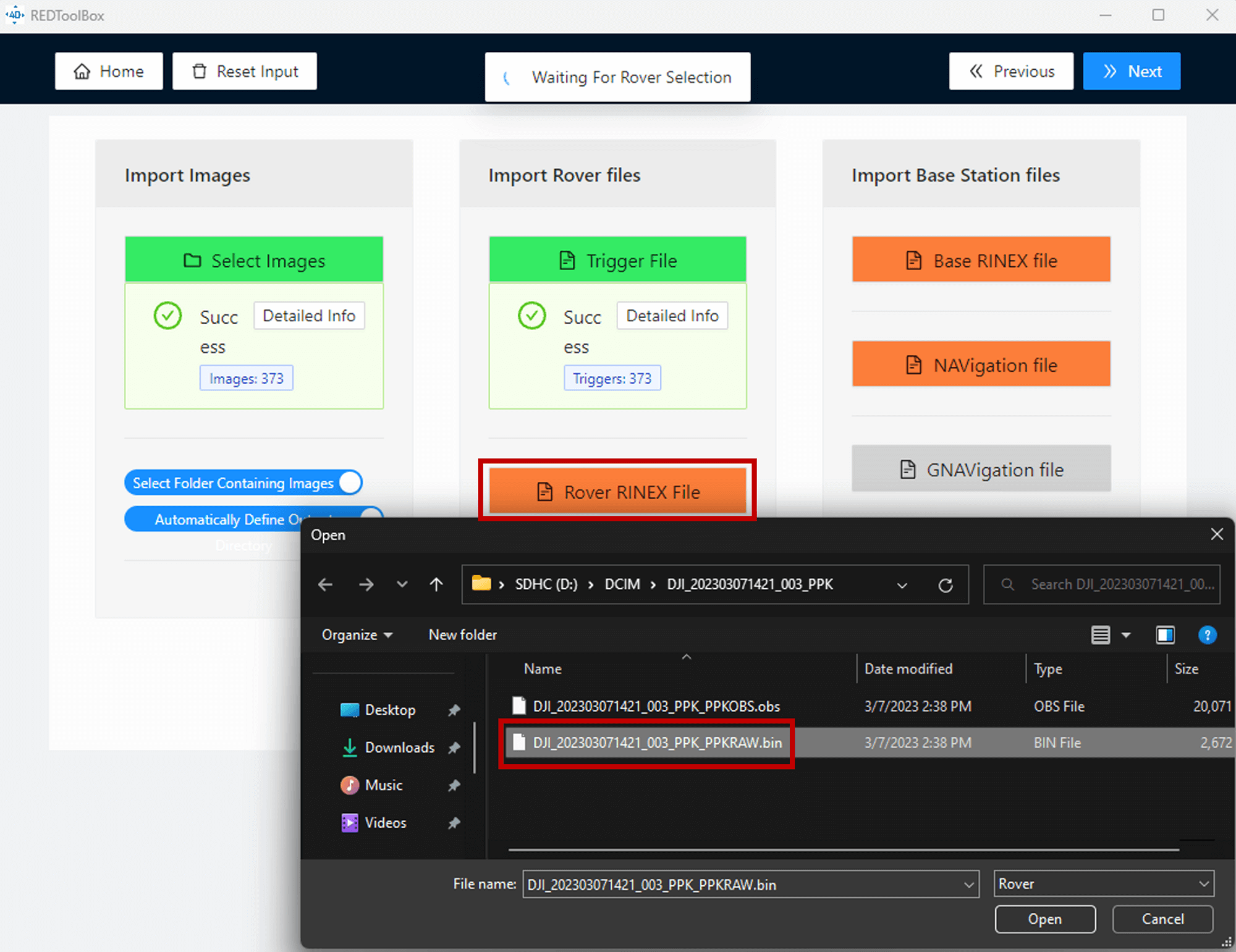
- 그런 다음 "로버 파일 가져오기" 섹션을 선택하고 "파일 트리거" 옵션을 선택해야 합니다. 여기에서 원본 이미지 폴더 아래에 이름이 "XXX_Timestamp.mrk"인 MRK 파일을 가져올 수 있습니다. 이 파일은 PPK 프로세스에서 사용될 이미지 타임스탬프에 대한 중요한 정보를 제공합니다.
- MRK 파일을 가져온 후 "ROVER RINEX FILE" 옵션을 다시 선택하고 원본 이미지 폴더 아래에 "XXX_PPKRAW.BIN"이라는 이름의 RINEX 파일을 가져와야 합니다. 올바른 파일을 선택해야 PPK 프로세스가 성공할 수 있습니다.
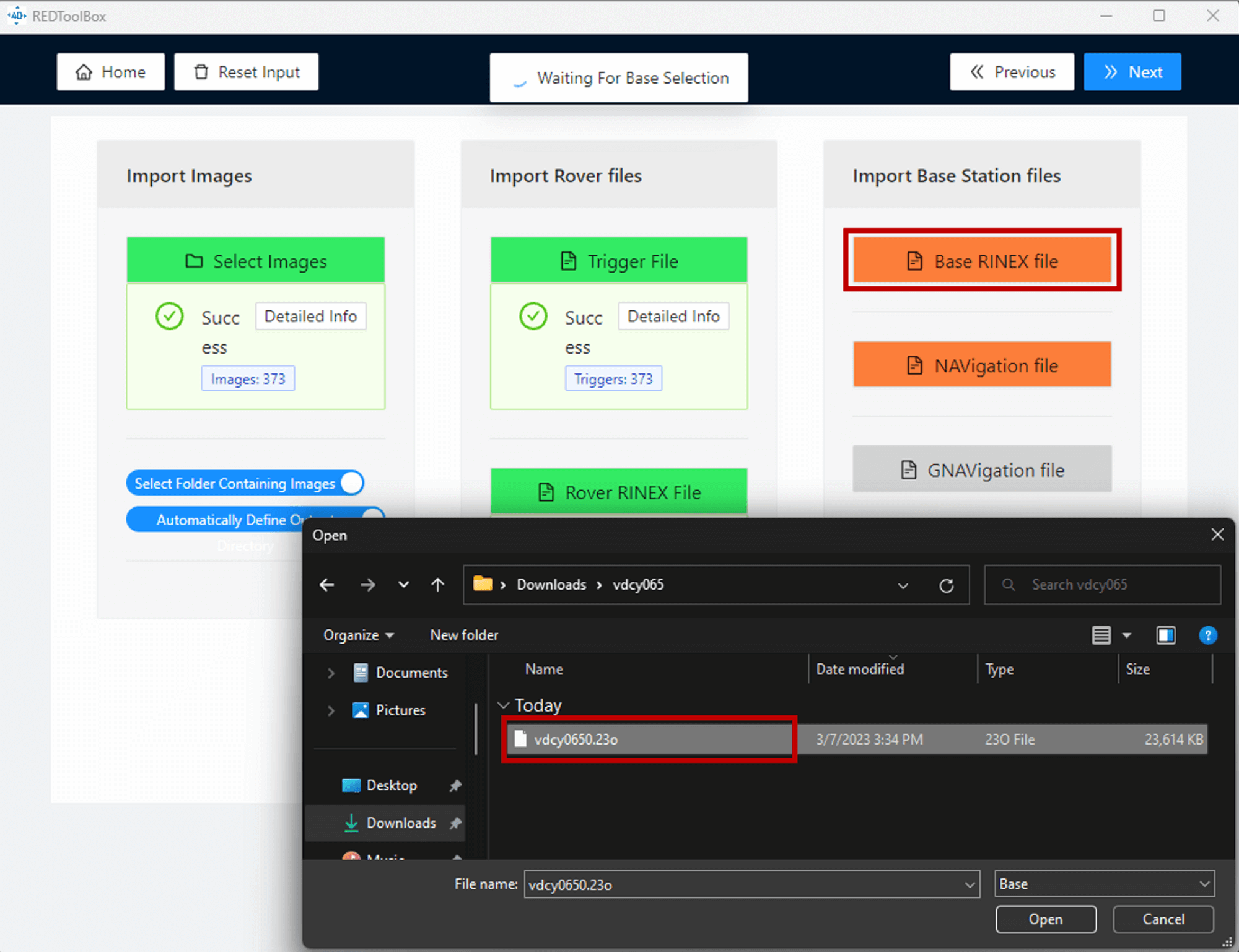
- "기지국 파일 가져오기" 섹션으로 이동하여 "기지국 파일" 옵션을 선택하고 UFCORS 사이트에서 다운로드한 원시 위성 데이터 폴더에서 이름이 "XXX.xxo"인 RINEX 파일을 가져옵니다. PPK 처리를 위해 DJI D-RTK 2 이동국을 사용하는 경우 이 옵션에서 .dat 형식의 RTCM 파일을 선택하고 가져옵니다. 여러 .dat RTCM 파일을 단일 파일로 병합해야 하는 경우 다음 도구를 사용하여 여러 RTCM 파일과 동일한 디렉터리에서 실행하십시오 merge_bin.bat
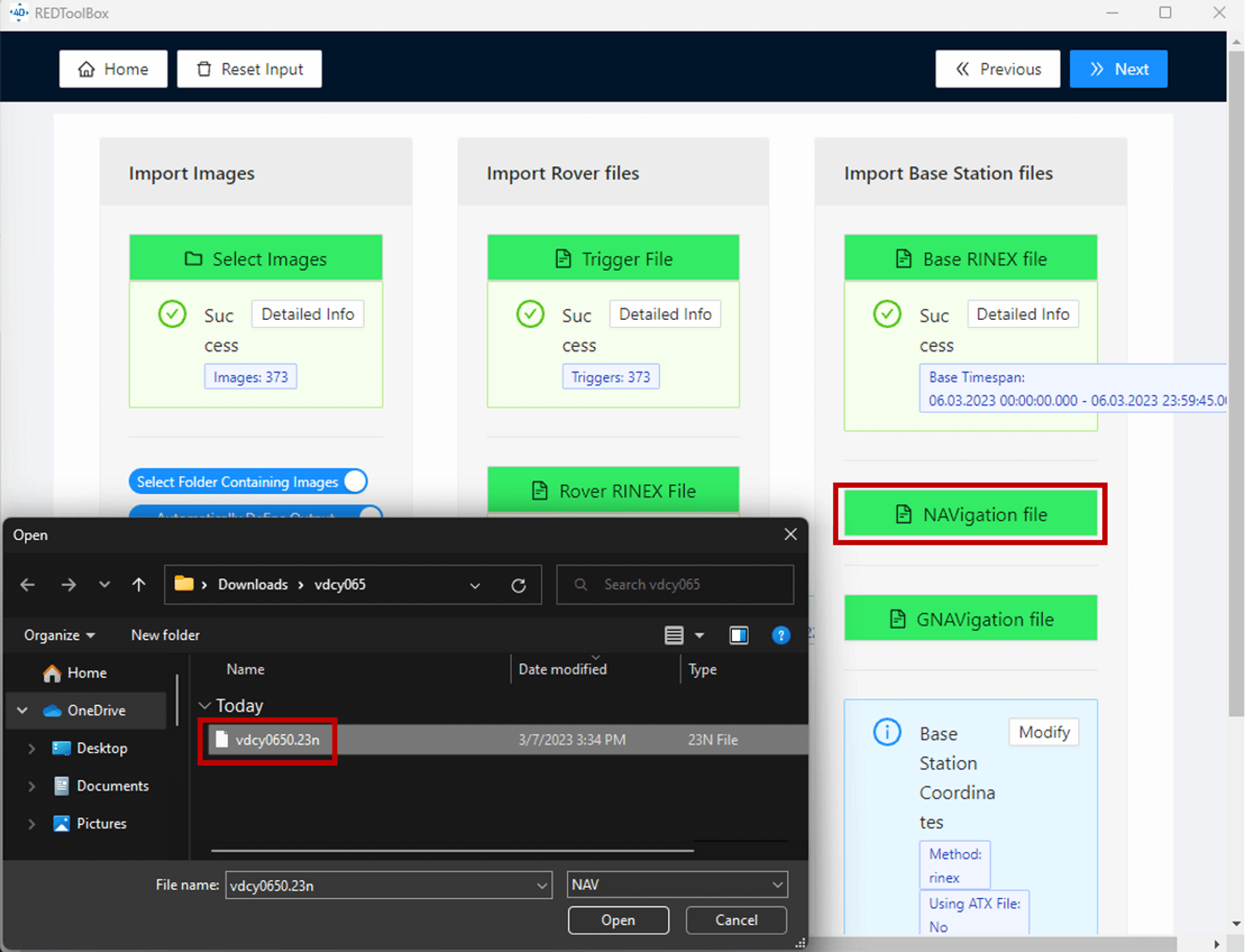
- 원시 위성 데이터 폴더에서 XXX.xxo 파일을 선택하면 NAVigation 및 GNAVigation 파일을 자동으로 가져옵니다. 아니면 UFCORS 사이트에서 다운로드 한 원시 위성 데이터 폴더 내에서 이 두 파일을 찾을 수 있습니다.
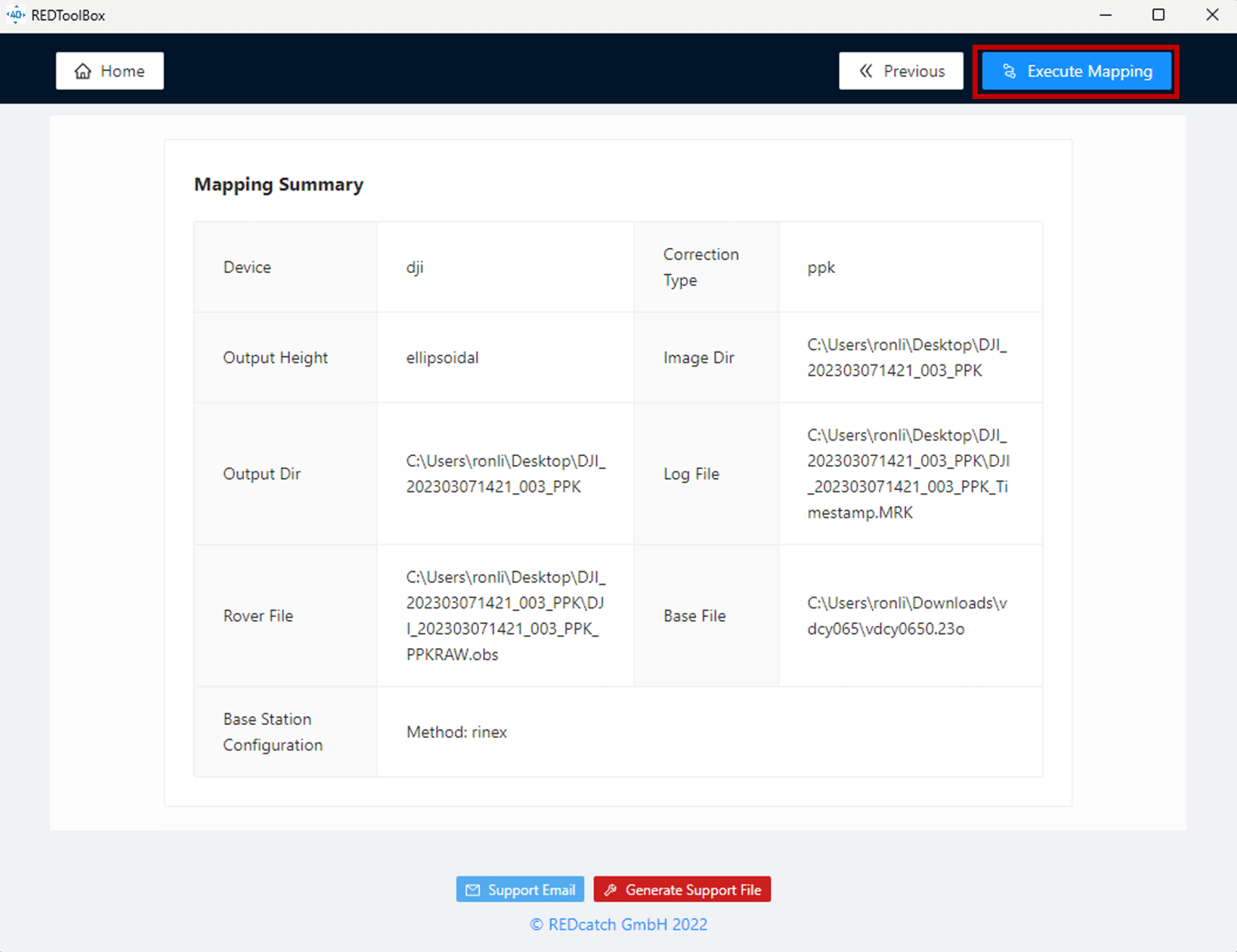
- 마지막으로 매핑 요약을 검토하고 "매핑 실행"을 선택하여 PPK 프로세스를 시작합니다.
- 프로세스가 완료되면 "PDF 품질 보고서" 및 "텍스트 파일"을 선택한 다음 "매핑에서 출력 생성" 옵션을 선택합니다.
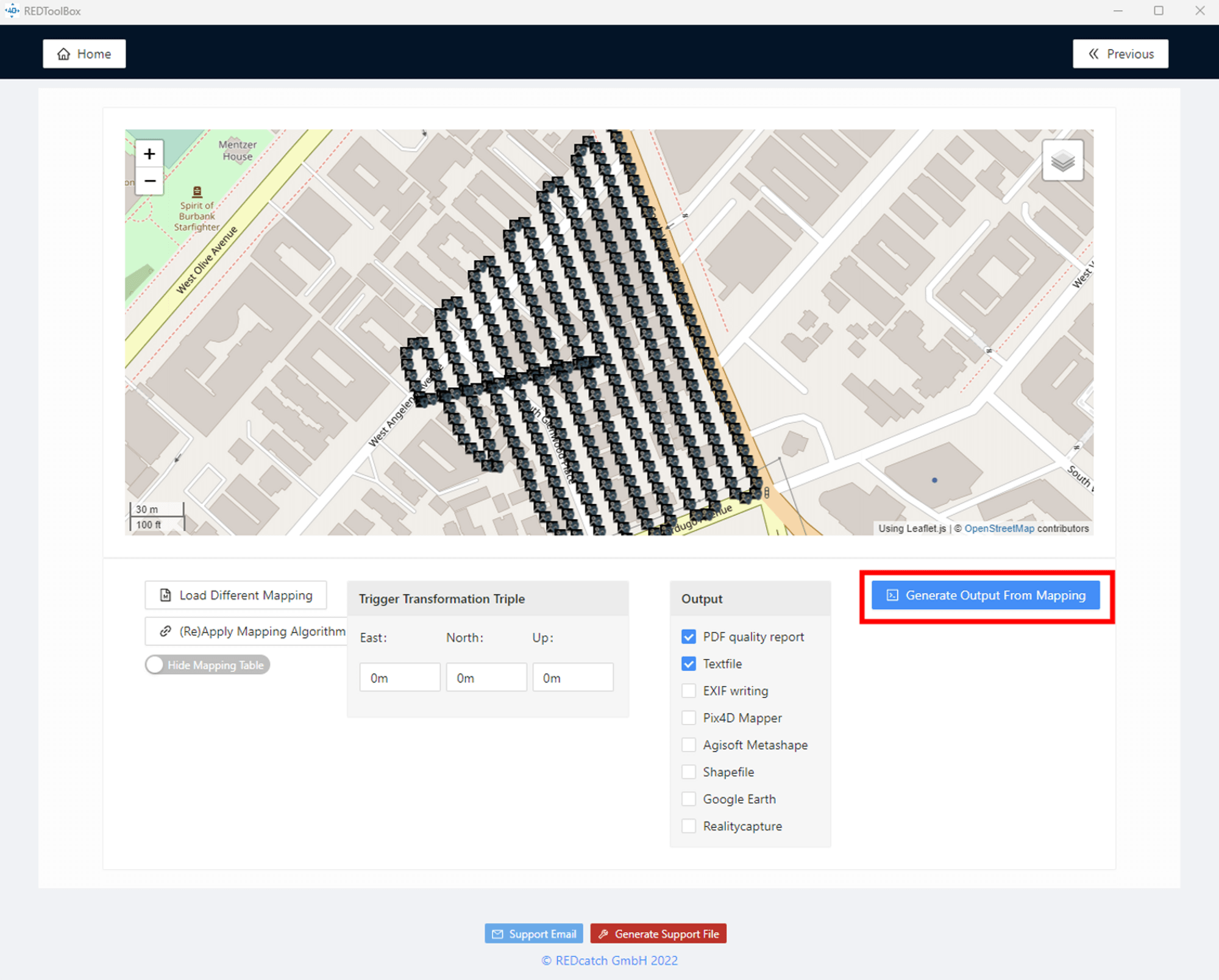
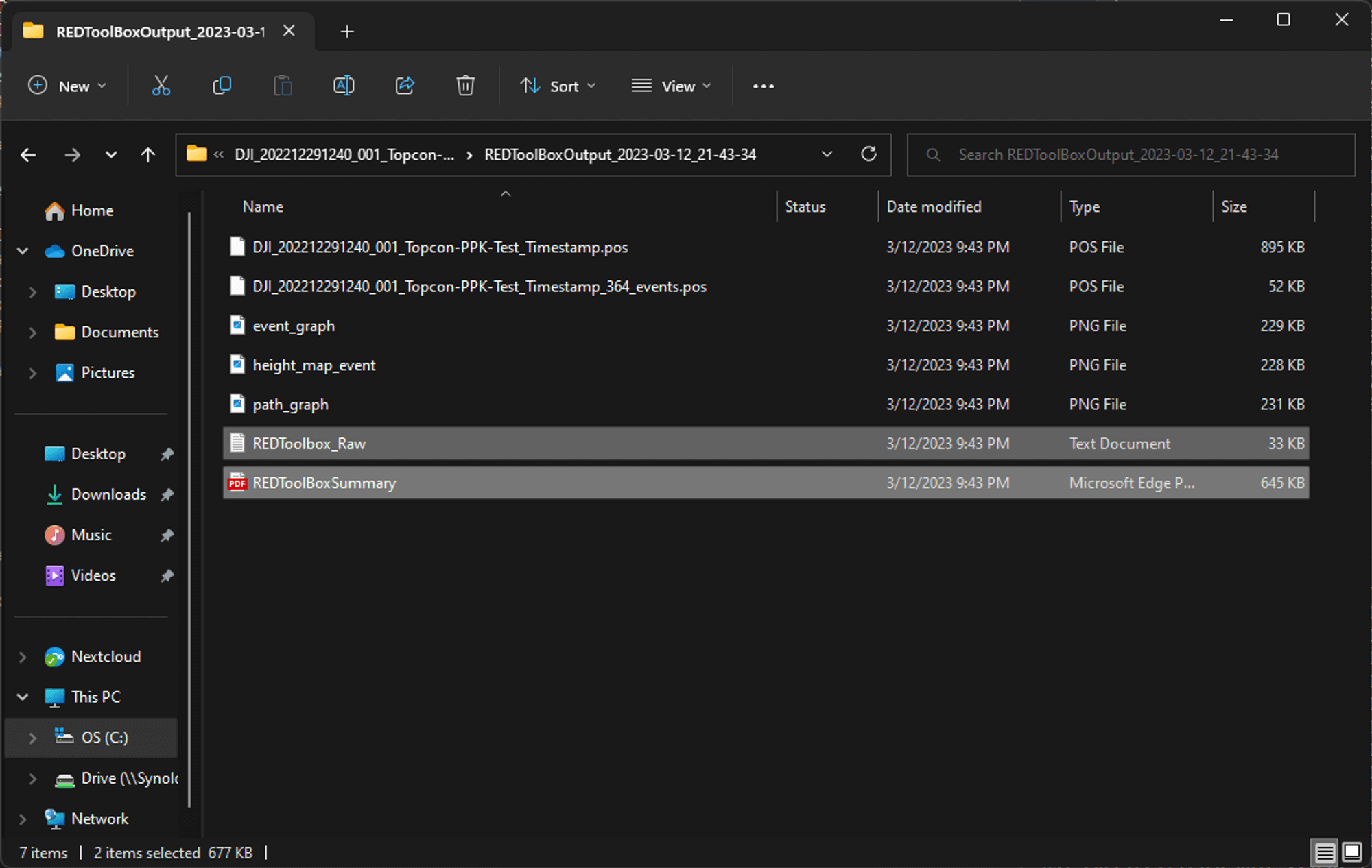
- 수정된 POS 데이터(REDToolbox_Raw.txt)와 요약 보고서(REDToolBoxSummary.pdf)를 모두 내보내려면 출력 폴더를 엽니다. 나중에 사진 측량 처리를 위해 수정된 이미지 POS 데이터와 함께 첫 번째 타임스탬프 파일을 사용합니다.
POS 데이터 덮어쓰기
드론 이미지 POS(위치 및 방향) 데이터는 이미지를 캡처할 때 드론의 위치, 자세, 궤도에 대한 정보를 나타냅니다. 이 데이터는 일반적으로 드론에 탑재된 GPS 및 기타 센서를 사용하여 얻어지며, 이미지를 정확하게 지리적으로 참조하고 사진 측량 기술로 측량 영역의 3D 모델 또는 지도를 생성하는 데 사용됩니다.
사진 측량 프로세스에서 드론 이미지 POS 데이터는 항공 삼각 측량 프로세스 중 3D 공간에서 각 이미지의 위치와 방향을 정확하게 결정하는 데 사용됩니다. 항공 삼각 측량 프로세스에는 겹치는 부분과 해당 이미지 특징을 기반으로 이미지의 상대적 위치와 방향을 계산하는 작업이 포함됩니다. 드론 이미지 POS 데이터는 3D 공간에서 각 이미지의 방향을 계산하는 데 사용되며, 이 정보는 조사 영역을 나타내는 저밀도 포인트 클라우드를 생성하는 데 사용됩니다.
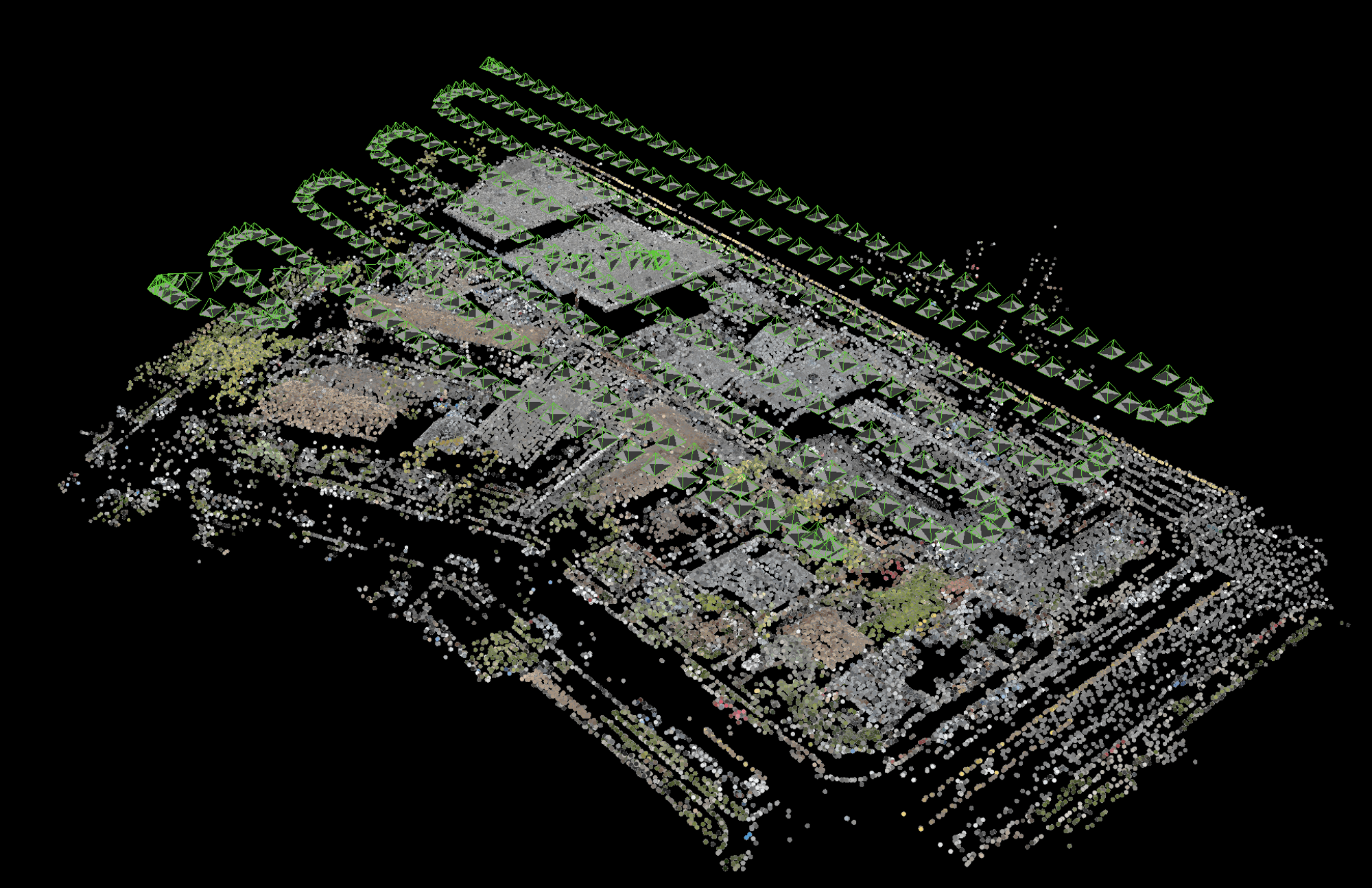
이미지 POS를 기반으로 생성된 항공 삼각 측량 모델
드론 이미지 POS 데이터가 부정확하거나 정교하지 않을 경우 사진 측량 프로세스의 출력도 정확하지 않습니다. 드론 이미지 POS 데이터에 오류가 있으면 항공 삼각 측량 프로세스에서도 오류가 발생할 수 있으며, 이로 인해 번들 조정 프로세스에서 오류가 발생하고 궁극적으로 출력 정확도가 떨어집니다.
드론 이미지 POS 데이터의 정확성은 PPK 프로세스 동안 출력의 전역 정확도에 영향을 미칩니다. PPK 프로세스는 드론 이미지 POS 데이터에서 GPS 드리프트 또는 노이즈 및 기타 센서 관련 오류를 수정합니다. 그 결과 생성된 PPK 보정 POS 데이터는 조사 영역을 나타내는 고밀도 포인트 클라우드를 생성하는 데 사용되며, 이를 사용하여 3D 모델 또는 지도를 생성할 수 있습니다. 따라서 사진 측량 프로세스 소프트웨어에서 드론 이미지 POS 데이터를 올바르게 정의하는 것이 중요합니다.
이미지 POS 데이터를 적용하고 덮어쓰는 예시로 DJI Terra 소프트웨어를 사용합니다. Terra 소프트웨어에서 PPK 수정 이미지 POS 데이터를 적용하고 덮어쓰려면 아래 단계를 따르거나 동영상을 시청하십시오.
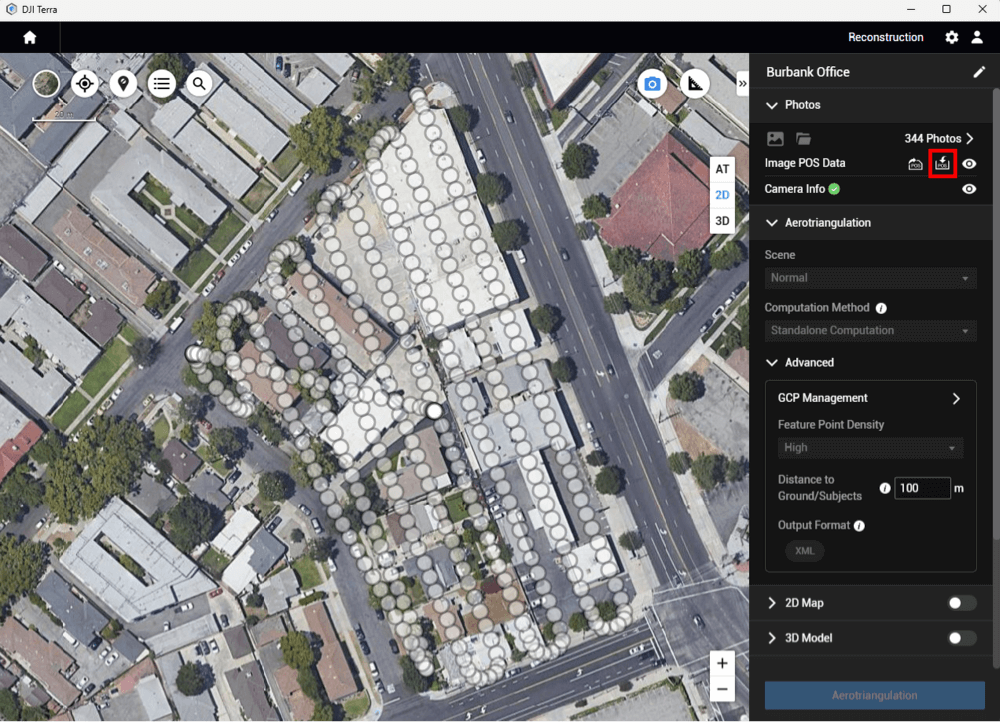
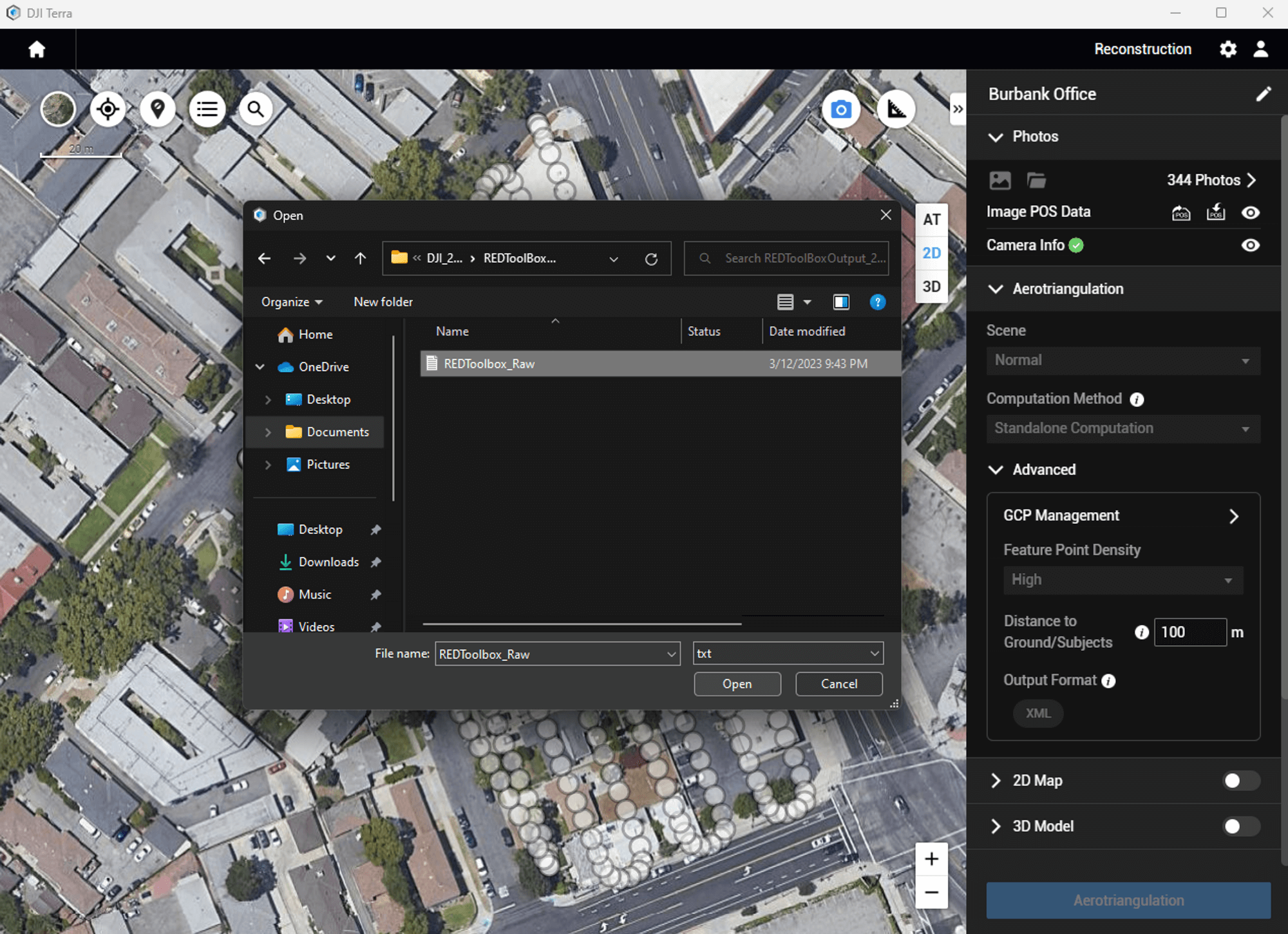
- DJI Terra 소프트웨어를 열고 "재구성" 탭에서 "새 임무"를 선택한 다음 "가시광"을 선택하여 새로운 사진 측량 재구성 임무를 생성합니다. 모든 사진을 가져온 후, 아래와 같이 "POS 데이터 가져오기" 아이콘 옵션을 선택합니다.
- 처리된 POS 파일을 마지막 섹션에서 텍스트 형식으로 가져와야 합니다.
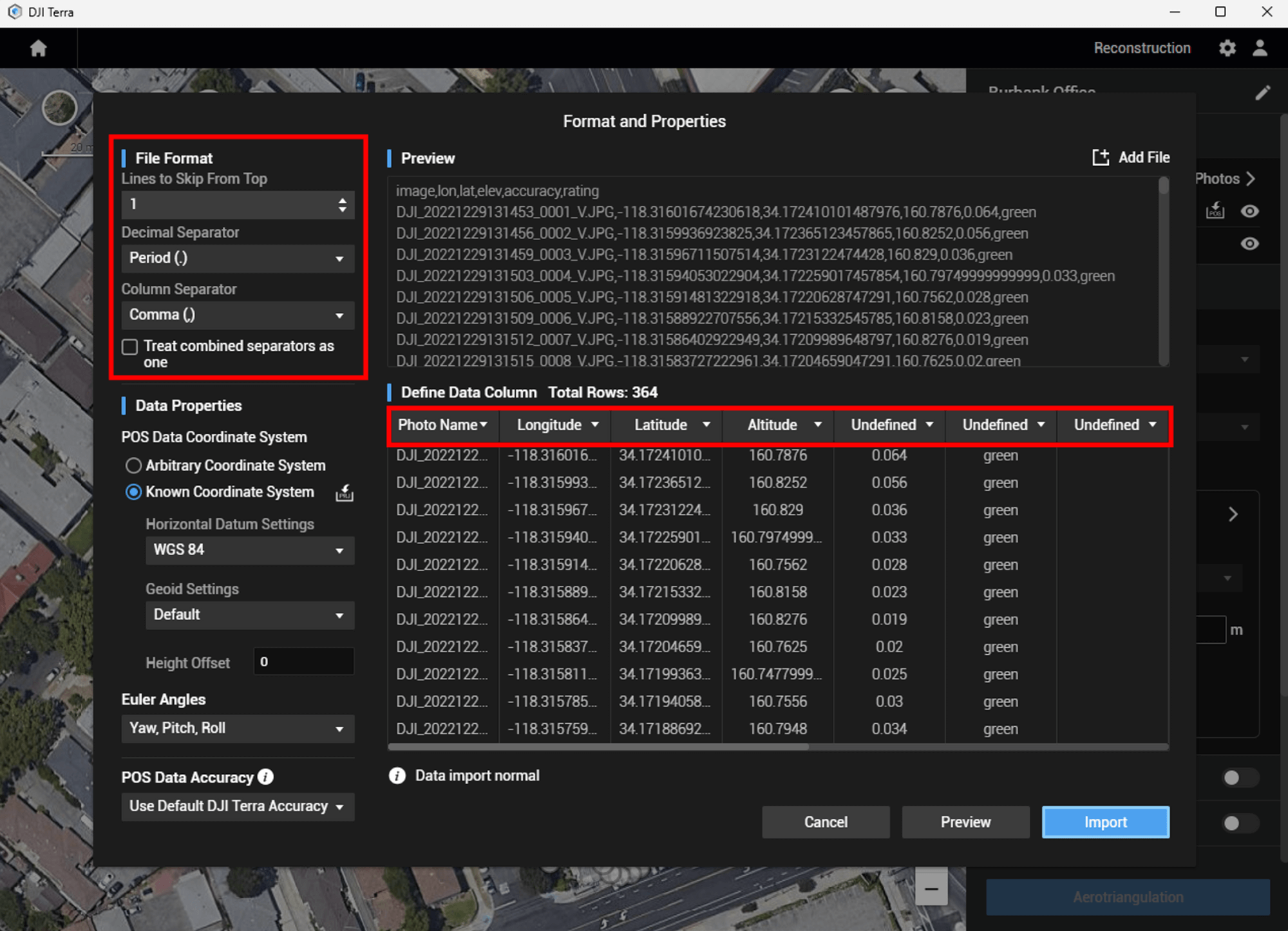
- 이미지 POS 데이터를 가져오면 "포맷 및 속성" 창이 자동으로 나타납니다. 이 창에서 데이터 열을 조정하고 "데이터 열 정의" 섹션에서 열 속성을 정의합니다. 테이블의 첫 번째 행에 첫 번째 이미지의 POS 데이터가 포함되어 있는지 확인하고 "파일 형식" 섹션 아래의 도구를 사용하여 데이터 구분 기호와 데이터의 첫 번째 행을 정의합니다.
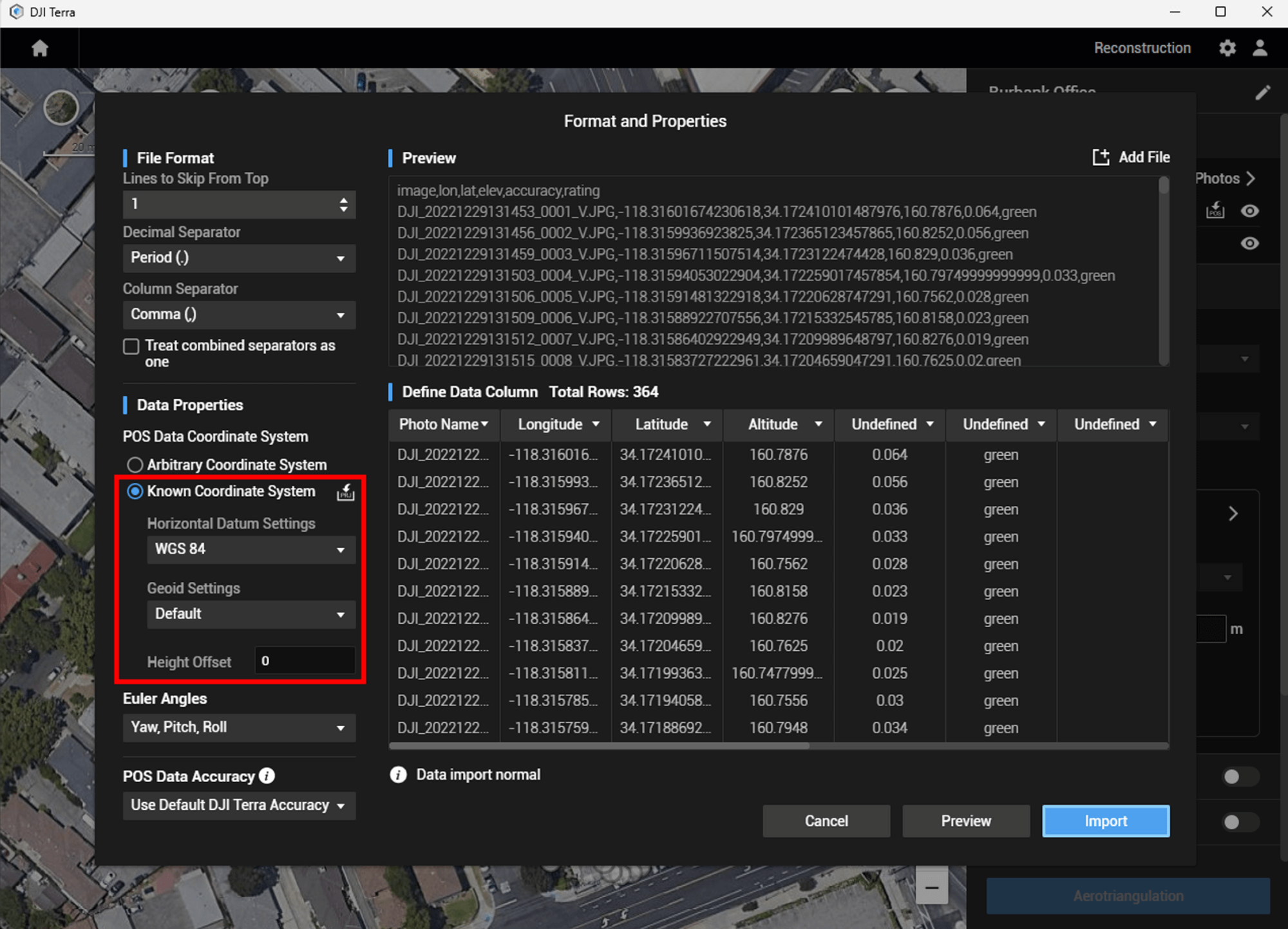
- 계속하려면 POS 데이터 좌표계 아래의 "알려진 좌표계" 옵션을 선택합니다. 그런 다음 가져온 PPK 처리 이미지 POS 데이터에 해당하는 수평 및 수직 좌표를 선택합니다. 출력에서 변위를 방지하려면 수평 및 수직 좌표계에 대해 올바른 좌표를 선택하는 것이 중요합니다. 어떤 좌표계를 선택해야 할지 잘 모르는 경우 PPK 소프트웨어 설정 또는 PPK 데이터 프로세스 품질 보고서에서 PPK 처리 POS 데이터의 좌표계를 찾을 수 있습니다. 일반적으로 수평 좌표계는 WGS84(EPSG:4326), 수직 좌표계는 타원형 높이(미터 단위, DJI Terra에서 기본값으로 설정할 수 있음)에 있어야 합니다. 새 POS 데이터 정의를 마치면 "가져오기"를 선택합니다.
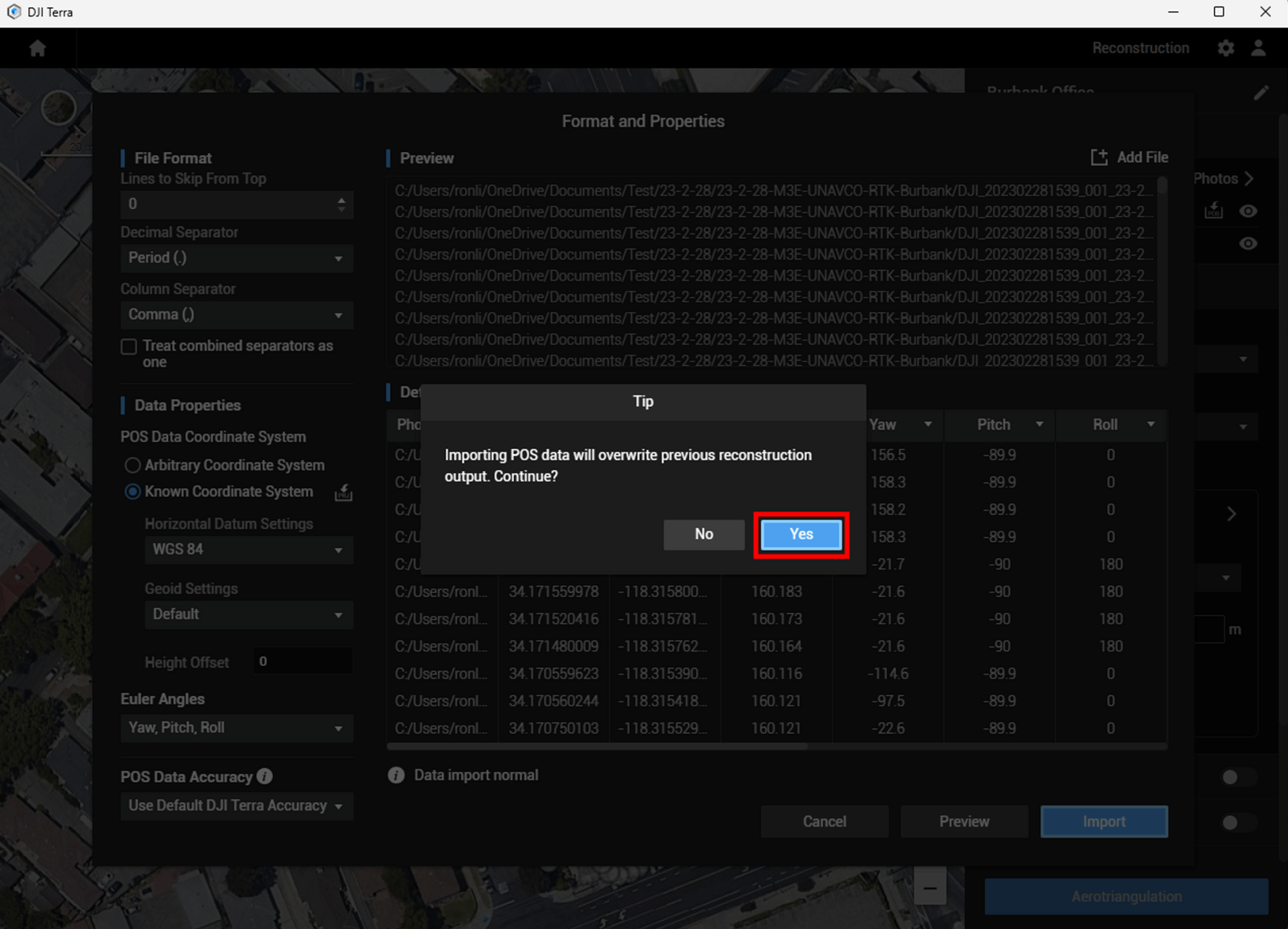
- 사진에 포함된 이전 이미지 POS 데이터를 txt 파일에서 PPK 수정 POS 데이터로 교체하려면 "예"를 선택하여 DJI Terra에서 작업을 확인합니다. 이제 POS 데이터를 덮어썼습니다.
PPK 워크플로우는 다양한 응용 분야에서 매우 정밀한 지리 공간 데이터를 얻을 수 있는 효율적이고 정확한 솔루션을 제공합니다. PPK는 GPS 및 후처리 기술을 모두 활용하므로 사용자는 까다로운 환경에서도 센티미터 수준의 정확도를 달성할 수 있습니다. 적절한 PPK 워크플로우를 따르고 고급 소프트웨어 및 하드웨어 도구를 활용하면 사용자는 데이터의 정확성과 정밀도를 최고 수준으로 높이고 궁극적으로 더 나은 의사 결정을 내리고 결과를 개선할 수 있습니다.




